机械臂末端位移测量工装的制作方法
本技术涉及测量,尤其是指一种机械臂末端位移测量工装。
背景技术:
1、机械臂在实际作业场景中存在紧急急停或者断电等情况,而当这些紧急情况出现时机械臂末端会产生一定的位移,直至机械臂关节限位而停止。这在手术机器人领域特别危险,以脊柱手术机器人为例,当机械臂末端的克氏针在钻骨过程中因上述情况产生的位移可能使得克氏针进针深度,方向不可控,给患者带来潜在的重大风险。
2、为了避免机械臂在紧急情况下与工件等结构产生碰撞,以及在医疗应用领域对患者带来的风险,需要得到机械臂末端的精确位移,目前测量机械臂末端位移的手段主要采用激光跟踪仪,激光跟踪仪能够达到需求精度,而激光跟踪仪的采购费用高达上百万,并且激光跟踪仪的租用费用较高,导致测量成本较高。
技术实现思路
1、为了解决上述技术问题,本实用新型提供了一种机械臂末端位移测量工装,可以在保证测量精度的前提下,降低测量成本。
2、本实用新型提供了一种机械臂末端位移测量工装,包括底座、安装板和位移测量机构,所述安装板可滑移地连接在所述底座上,所述安装板的一端设置有激光射端,所述安装板的另一端设置有激光接收端,所述激光发射端所发出的光线由所述激光接收端接收,所述位移测量机构包括移动端和固定端,所述固定端与所述底座相连接,所述移动端与所述安装板相连接,所述机械臂末端的运动轨迹经过所述激光发射端所发出的光线。
3、在本实用新型的一个实施例中,所述位移测量机构为螺旋测微器,所述螺旋测微器包括测微螺杆和测微框架,所述移动端为所述测微螺杆,所述固定端为所述测微框架。
4、在本实用新型的一个实施例中,所述底座包括相互连接的底板和立板,所述底板与所述立板相垂直,所述安装板可滑移地连接在所述立板上。
5、在本实用新型的一个实施例中,还包括滑移模组,所述滑移模组包括滑动板和滑动座,所述滑动座连接在所述立板上,所述滑动座上沿竖直方向设置有滑轨,所述滑动板上设置有滑块,所述滑块可滑移地连接在所述滑轨上,所述安装板可滑移地连接在所述滑动板上。
6、在本实用新型的一个实施例中,还包括第一连接件,所述第一连接件包括第一连接板和第二连接板,所述第一连接板与所述第二连接板相垂直,所述第一连接板与所述滑动座相连接,所述第二连接板上设置有安装孔,所述测微框架连接在所述安装孔内。
7、在本实用新型的一个实施例中,还包括第二连接件,所述第二连接件包括第三连接板和第四连接板,所述第三连接板与所述第四连接板相垂直,所述第三连接板与所述滑动板相连接,所述第四连接板与所述测微螺杆相连接,所述测微螺杆的轴线沿竖直方向。
8、在本实用新型的一个实施例中,所述安装板为u型框架,所述u型框架包括第一连杆、第二连杆和第三连杆,所述第一连杆、第三连杆与所述第二连杆相垂直设置,且所述第一连杆、第三连杆关于所述第二连杆对称布置,所述第一连杆、第二连杆和第三连杆之间形成沿竖直方向的通槽,所述通槽用于容纳所述机械臂末端的移动。
9、在本实用新型的一个实施例中,所述激光发射端为矩阵光纤传感器发射端,所述激光接收端为矩阵光纤传感器接收端,所述矩阵光纤传感器发射端连接在所述第一连杆的端部,所述矩阵光纤传感器接收端连接在所述第二连杆的端部。
10、在本实用新型的一个实施例中,所述机械臂末端夹持有测量挡片,所述测量挡片的移动轨迹自上而下穿过所述通槽。
11、在本实用新型的一个实施例中,还包括连接板,所述连接板的一端连接在所述滑动座上,所述连接板的另一端设置有沿竖直方向的滑动槽,所述滑动板上连接有锁紧螺母,所述锁紧螺母包括锁紧端部和锁紧螺纹部,所述滑动板上设置有垂直于所述连接板的螺纹孔,所述螺纹锁紧部穿过所述滑动槽与所述螺纹孔相连接,所述锁紧端部的直径大于所述滑动槽的宽度。
12、本实用新型的上述技术方案相比现有技术具有以下优点:
13、(1)本实用新型所述的机械臂末端位移测量工装,将激光传感器与位移测量机构相结合,当机械臂末端产生急停或者是断电情况时,机械臂末端向下移动时经过激光发射端和激光接收端之间的光线,对激光发射端所发出的光线起到了阻挡作用,然后移动移动端,并通过移动端带动安装板移动至机械臂末端不再阻挡激光发射端所发出的光线,位移测量机构前后的读数差值(移动端与固定端之间的读数差值)则为机械臂末端的位移,通过螺旋测微实现了对机械臂末端位移的高精度测量。
14、(2)通过激光传感器与位移测量机构的结合,在保证需求测量精度的前提下,有效地降低了测量成本。
技术特征:
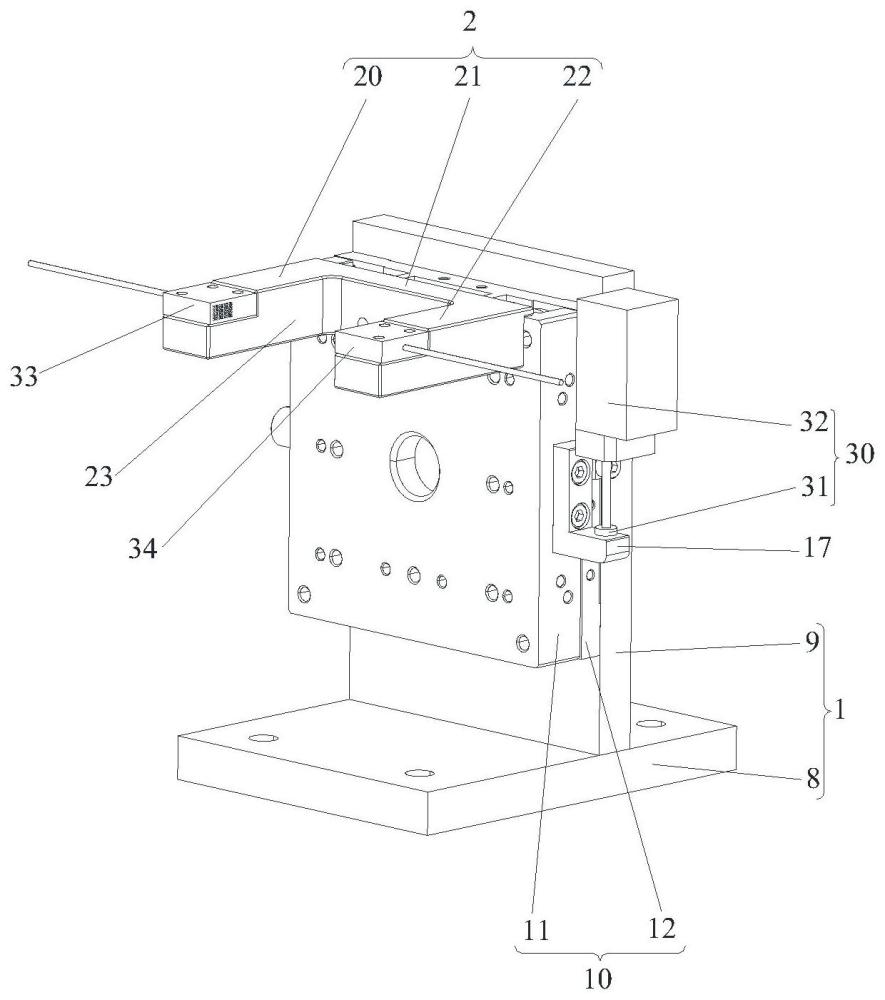
1.一种机械臂末端位移测量工装,其特征在于:包括底座(1)、安装板(2)和位移测量机构(30),所述安装板(2)可滑移地连接在所述底座(1)上,所述安装板(2)的一端设置有激光发射端(33),所述安装板(2)的另一端设置有激光接收端(34),所述激光发射端(33)所发出的光线由所述激光接收端(34)接收,所述位移测量机构(30)包括移动端(31)和固定端(32),所述固定端(32)与所述底座(1)相连接,所述移动端(31)与所述安装板(2)相连接,所述机械臂末端的运动轨迹经过所述激光发射端(33)所发出的光线。
2.根据权利要求1所述的机械臂末端位移测量工装,其特征在于:所述位移测量机构(30)为螺旋测微器(3),所述螺旋测微器(3)包括测微螺杆(6)和测微框架(7),所述移动端(31)为所述测微螺杆(6),所述固定端(32)为所述测微框架(7)。
3.根据权利要求2所述的机械臂末端位移测量工装,其特征在于:所述底座(1)包括相互连接的底板(8)和立板(9),所述底板(8)与所述立板(9)相垂直,所述安装板(2)可滑移地连接在所述立板(9)上。
4.根据权利要求3所述的机械臂末端位移测量工装,其特征在于:还包括滑移模组(10),所述滑移模组(10)包括滑动板(11)和滑动座(12),所述滑动座(12)连接在所述立板(9)上,所述滑动座(12)上沿竖直方向设置有滑轨,所述滑动板(11)上设置有滑块,所述滑块可滑移地连接在所述滑轨上,所述安装板(2)可滑移地连接在所述滑动板(11)上。
5.根据权利要求4所述的机械臂末端位移测量工装,其特征在于:还包括第一连接件(13),所述第一连接件(13)包括第一连接板(14)和第二连接板(15),所述第一连接板(14)与所述第二连接板(15)相垂直,所述第一连接板(14)与所述滑动座(12)相连接,所述第二连接板(15)上设置有安装孔(16),所述测微框架(7)连接在所述安装孔(16)内。
6.根据权利要求4所述的机械臂末端位移测量工装,其特征在于:还包括第二连接件(17),所述第二连接件(17)包括第三连接板(18)和第四连接板(19),所述第三连接板(18)与所述第四连接板(19)相垂直,所述第三连接板(18)与所述滑动板(11)相连接,所述第四连接板(19)与所述测微螺杆(6)相连接,所述测微螺杆(6)的轴线沿竖直方向。
7.根据权利要求2所述的机械臂末端位移测量工装,其特征在于:所述安装板(2)为u型框架,所述u型框架包括第一连杆(20)、第二连杆(21)和第三连杆(22),所述第一连杆(20)、第三连杆(22)与所述第二连杆(21)相垂直设置,且所述第一连杆(20)、第三连杆(22)关于所述第二连杆(21)对称布置,所述第一连杆(20)、第二连杆(21)和第三连杆(22)之间形成沿竖直方向的通槽(23),所述通槽(23)用于容纳所述机械臂末端的移动。
8.根据权利要求7所述的机械臂末端位移测量工装,其特征在于:所述激光发射端(33)为矩阵光纤传感器发射端(4),所述激光接收端(34)为矩阵光纤传感器接收端(5),所述矩阵光纤传感器发射端(4)连接在所述第一连杆(20)的端部,所述矩阵光纤传感器接收端(5)连接在所述第二连杆(21)的端部。
9.根据权利要求7所述的机械臂末端位移测量工装,其特征在于:所述机械臂末端夹持有测量挡片(24),所述测量挡片(24)的移动轨迹自上而下穿过所述通槽(23)。
10.根据权利要求4所述的机械臂末端位移测量工装,其特征在于:还包括连接板(25),所述连接板(25)的一端连接在所述滑动座(12)上,所述连接板(25)的另一端设置有沿竖直方向的滑动槽(26),所述滑动板(11)上连接有锁紧螺母(27),所述锁紧螺母(27)包括锁紧端部(28)和锁紧螺纹部(29),所述滑动板(11)上设置有垂直于所述连接板(25)的螺纹孔,所述锁紧螺纹部穿过所述滑动槽(26)与所述螺纹孔相连接,所述锁紧端部(28)的直径大于所述滑动槽(26)的宽度。
技术总结
本技术涉及一种机械臂末端位移测量工装,包括底座、安装板和位移测量机构,所述安装板可滑移地连接在所述底座上,所述安装板的一端设置有激光射端,所述安装板的另一端设置有激光接收端,所述激光发射端所发出的光线由所述激光接收端接收,所述位移测量机构包括移动端和固定端,所述固定端与所述底座相连接,所述移动端与所述安装板相连接,所述机械臂末端的运动轨迹经过所述激光发射端所发出的光线。本技术的机械臂末端位移测量工装在保证测量精度的前提下,有效地降低了测量成本。
技术研发人员:姜亚竹,潘永成,陆臻陶
受保护的技术使用者:鑫君特(苏州)医疗科技有限公司
技术研发日:20240227
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!