数据采集设备和数据采集系统的制作方法
本技术涉及自动驾驶领域,具体涉及一种数据采集设备和数据采集系统。
背景技术:
1、安全问题是露天矿山采运排作业中必须优先考虑的问题,尤其是土石方的卸载作业。为保证作业安全,露天矿山生产作业规范要求排土线前一定距离要整修成反斜坡,并在排土线位置整修挡墙,并且对反坡角度和挡墙高度有特定的要求,以防止矿车倒车或者倾倒矿石时发生危险。
2、相关技术中,排土场会配置专职的排土管理员在铲车整修完排土反坡和挡墙后进行测量验收,验收通过后才允许矿卡排土卸料。其中,安全挡墙测量验收需要排土管理员下车到安全挡墙处使用rtk测量仪器进行多位置打点测量,因矿卡视野盲区较大导致排土管理员被撞的安全事故时有发生,特别是晚班,所以现场一般要求生产过程中排土管理员下车测量前需把全部作业设备叫停,这样的操作方式存在安全风险而且影响生产效率。
技术实现思路
1、本实用新型提供了一种数据采集设备和数据采集系统,通过安装于采集车顶部的采集设备,无需人工测量,自动获取采集排土场反坡以及挡墙的信息,为矿山自动驾驶车辆提供辅助信息。
2、第一方面,本实用新型提供了一种数据采集设备,所述数据采集设备包括:
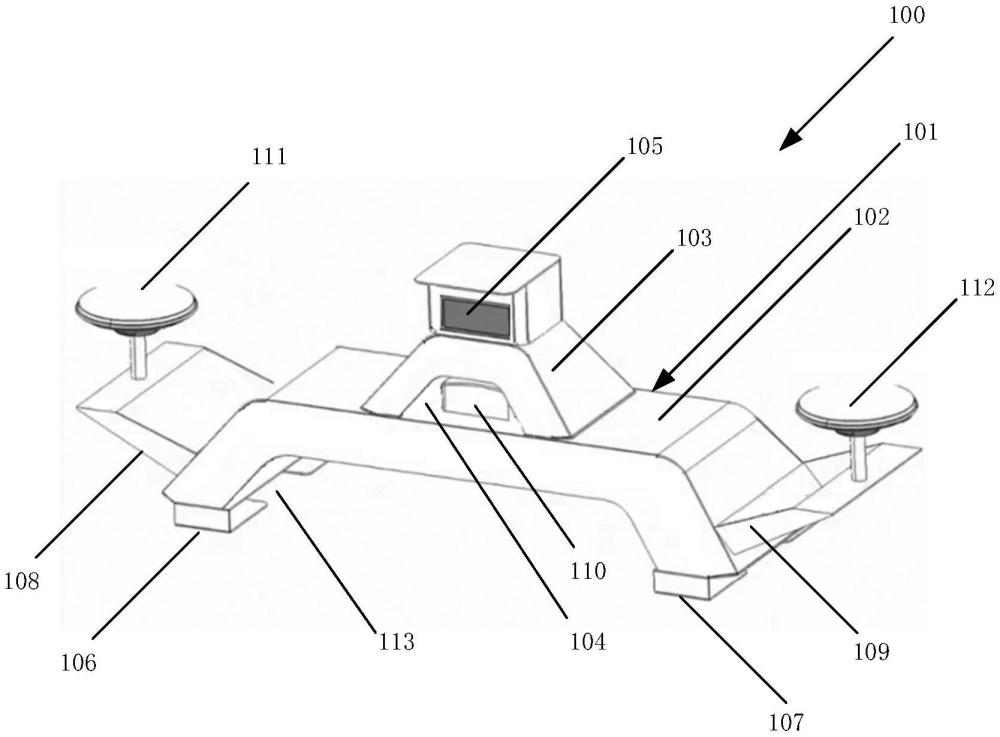
3、本体,所述本体上设置有定位单元、激光雷达传感器以及通讯单元,其中,所述定位单元包括对称安装在所述本体两侧的第一定位天线和第二定位天线,所述第一定位天线和所述第二定位天线用于确定所述采集设备的位置信息;
4、所述激光雷达传感器,安装于所述本体的顶部,用于采集排土场反坡和/或挡墙的点云数据;
5、所述通讯单元,与所述定位单元以及所述激光雷达传感器电连接,用于将所述定位单元确定的所述采集设置的位置信息、以及所述激光雷达传感器采集的排土场反坡坡度和/或挡墙高度信息发送给车辆或远程控制平台。
6、进一步的,所述定位单元包括gps定位单元或者gnss定位单元,所述gps定位单元或者所述gnss定位单元用于根据所述第一定位天线和第二定位天线确定所述采集设备的位置信息。
7、进一步的,所述定位单元包括安装在所述本体的中央位置的惯性导航单元,所述惯性导航单元用于根据惯性导航信息确定所述采集设备的位置信息。
8、进一步的,所述通讯单元包括:蜂窝网络通讯模块、车辆到车辆v2v通信模块和/或车辆到网络v2n通信模块。
9、进一步的,所述本体包括第一支架结构和第二支架结构,所述第二支架结构设置于所述第一支架结构的上表面,所述第二支架结构的上表面设置有所述激光雷达传感器,所述第二支架结构和所述第一支架结构的上表面所包裹形成的空间内设置有惯性导航单元。
10、进一步的,所述第一支架结构的两侧对称设置有第一支撑结构和第二支撑结构,其中,所述第一支撑结构用于固定所述第一定位天线,所述第二支撑结构用于固定所述第二定位天线。
11、进一步的,所述第一支撑结构的第一端连接于所述第一支架结构的一侧面且靠近该侧面的底部设置,所述第一支撑结构的第二端悬空设置,且所述第二端的高度接近所述第一支架结构的上表面的高度。
12、进一步的,所述第一支架结构的底部沿其长度方向的两侧对称设置有第一凹口和第二凹口,所述第一凹口和所述第二凹口可滑动地安装于采集车的顶部的导轨上,从而将所述本体固定于所述采集车的顶部。
13、进一步的,所述第一支架结构的上表面还设置有七合一天线。
14、第二方面,本实用新型提供了一种数据采集系统,所述数据采集系统包括计算单元、显示单元以前述任一项所述的采集设备,其中,
15、所述采集设备安装于采集车的顶部,并与所述计算单元通信连接,所述采集设备用于将激光雷达传感器采集的点云数据和定位单元获取的定位信息发送给所述计算单元;
16、所述计算单元,用于根据所述激光雷达传感器采集的点云数据和所述定位单元获取的定位信息,计算排土场反坡坡度和/或挡墙高度信息;
17、所述显示单元,与所述计算单元连接,所述显示单元用于对所述计算单元计算的排土场反坡坡度和/或挡墙高度信息进行显示。
18、进一步的,所述计算单元和/或所述显示单元,设置于所述采集车的内部;或者,所述计算单元和/或所述显示单元,设置于远程控制平台。
19、本实用新型提供的数据采集设备及系统,通过采集设备自动采集排土场反坡以及挡墙的点云数据,并将采集到排土场反坡以及挡墙的点云数据发送给车辆或远程控制平台。本实用新型的数据采集设备和数据采集系统,无需人工测量,自动获取采集排土场反坡以及挡墙的信息,并可以对不合格的排土场反坡以及挡墙区域进行提示,为矿山无人驾驶矿车提供安全保障。
技术特征:
1.一种数据采集设备,其特征在于,所述数据采集设备包括:
2.根据权利要求1所述的采集设备,其特征在于,所述定位单元包括gps定位单元或者gnss定位单元,所述gps定位单元或者所述gnss定位单元用于根据所述第一定位天线和第二定位天线确定所述采集设备的位置信息。
3.根据权利要求1或2所述的采集设备,其特征在于,所述定位单元包括安装在所述本体的中央位置的惯性导航单元,所述惯性导航单元用于根据惯性导航信息确定所述采集设备的位置信息。
4.根据权利要求1所述的采集设备,其特征在于,所述通讯单元包括:蜂窝网络通讯模块、车辆到车辆v2v通信模块和/或车辆到网络v2n通信模块。
5.根据权利要求1或2所述的采集设备,其特征在于,所述本体包括第一支架结构和第二支架结构,所述第二支架结构设置于所述第一支架结构的上表面,所述第二支架结构的上表面设置有所述激光雷达传感器,所述第二支架结构和所述第一支架结构的上表面所包裹形成的空间内设置有惯性导航单元。
6.根据权利要求5所述的采集设备,其特征在于,所述第一支架结构的两侧对称设置有第一支撑结构和第二支撑结构,其中,所述第一支撑结构用于固定所述第一定位天线,所述第二支撑结构用于固定所述第二定位天线。
7.根据权利要求6所述的采集设备,其特征在于,所述第一支撑结构的第一端连接于所述第一支架结构的一侧面且靠近该侧面的底部设置,所述第一支撑结构的第二端悬空设置,且所述第二端的高度接近所述第一支架结构的上表面的高度。
8.根据权利要求5所述的采集设备,其特征在于,所述第一支架结构的底部沿其长度方向的两侧对称设置有第一凹口和第二凹口,所述第一凹口和所述第二凹口可滑动地安装于采集车的顶部的导轨上,从而将所述本体固定于所述采集车的顶部。
9.根据权利要求5所述的采集设备,其特征在于,所述第一支架结构的上表面还设置有七合一天线。
10.一种数据采集系统,其特征在于,所述数据采集系统包括计算单元、显示单元以及权利要求1至9中任一项所述的采集设备,其中,
11.根据权利要求10所述的数据采集系统,其特征在于,
技术总结
本技术提供了一种数据采集设备和数据采集系统,该数据采集设备包括:本体,设置在本体上的定位单元、激光雷达传感器以及通讯单元,其中,该定位单元用于确定该采集设备的位置信息;该激光雷达传感器用于采集排土场反坡和/或挡墙的点云数据;该通讯单元用于将该数据采集设备的位置信息、以及排土场反坡和/或挡墙的点云数据发送给车辆或远程控制平台,并在车辆或远程控制平台的显示装置上对排土场反坡坡度值和挡墙高度值进行显示。本技术的数据采集设备和数据采集系统,无需人工测量,自动获取采集排土场反坡以及挡墙的信息,并对不合格的排土场反坡以及挡墙区域进行提示,从而为矿山无人驾驶矿车提供安全保障。
技术研发人员:肖亮
受保护的技术使用者:易控智驾科技有限公司
技术研发日:20240228
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!