声纳数据采集装置及水下机器人的制作方法
本申请涉及声纳数据采集,特别是涉及一种声纳数据采集装置及水下机器人。
背景技术:
1、水下机器人也被称为无人遥控潜水器,是一种工作于水下的极限作业机器人。由于水下环境恶劣危险,而人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,同时能在水下工程中提供前期探测及施工监控等作用。
2、为实现水下机器人在水中的移动及测量作业,水下机器人一般具有声纳器件,声纳器件产生声波,并利用声波在水中的传播和反射特性,对水下环境或预定目标物进行探测。声纳器件在作业中产生能够反应探测结果的声纳数据,并传递给采集模块。
3、在传统技术中,采集模块具有多个通信端子,采集模块经通信端子与声纳器件信号连接。随着对水下机器人性能要求的提升,水下机器人配置的声纳器件数量逐渐增加。由于采集模块的通信端子数量有限,声纳器件数量的增加会占用采集模块大部分的硬件接口资源,采集模块需要预留更多的通信端子,让水下机器人的线路结构复杂及使采集模块的硬件成本上升。
技术实现思路
1、基于此,有必要针对水下机器人配置的声纳器件数量逐渐增加而让水下机器人的线路结构复杂及使采集模块的硬件成本上升的问题,提供一种声纳数据采集装置及水下机器人。
2、一种声纳数据采集装置,包括:
3、多个声纳单元,至少有两个;所述声纳单元具有接收端及发送端;
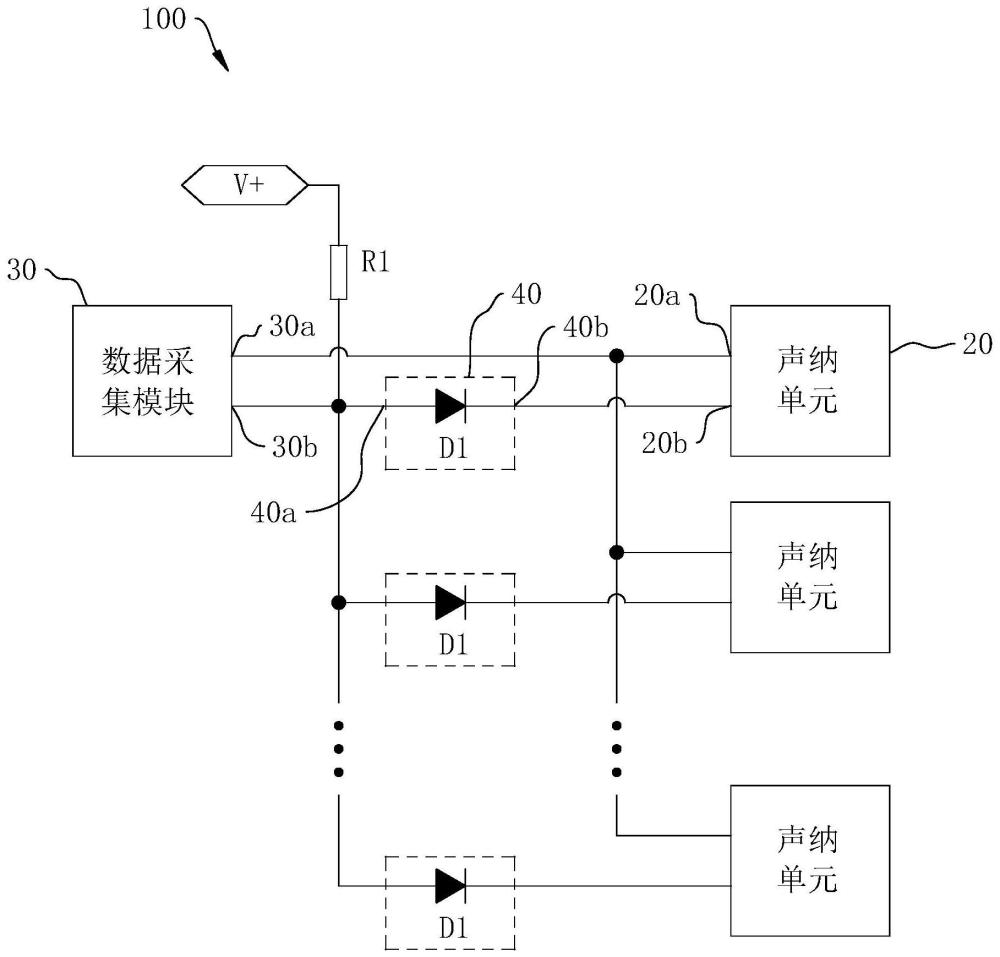
4、数据采集模块,具有分送端及输入端;所述数据采集模块的分送端分别与各个所述声纳单元的接收端形成能够传递广播信息的信号连接;所述数据采集模块的输入端与电源正极之间电连接有电阻元件;所述声纳单元的发送端能够在所述接收端收到相匹配的广播信息时以串行数据形式发出声纳数据,并在所述接收端收到非匹配的广播信息时保持在高电平;及
5、单向导通元件,与所述声纳单元一对一地对应设置;所述单向导通元件包括第一端极及第二端极;各个所述单向导通元件的第一端极分别电连接于所述数据采集模块的输入端;所述单向导通元件的第二端极电连接于对应的所述声纳单元的发送端;所述单向导通元件在所述第一端极的电势大于所述第二端极的电势时呈导通状态;所述单向导通元件在所述第一端极的电势不大于所述第二端极的电势时呈截止状态。
6、上述声纳数据采集装置,数据采集模块的广播信息同时发送至各个声纳单元的接收端。各个声纳单元分别存储有不同的位置信息,每个声纳单元具有唯一的位置信息,因而数据采集模块每次所发出的广播信息仅能与其中一个声纳单元的位置信息相匹配,其余的声纳单元的位置信息与该广播信息形成非匹配关系。位置信息与广播信息相匹配的声纳单元进入触发状态并在发送端以串行数据形式发出声纳数据。声纳数据的输出使声纳单元的发送端呈现出高电平与低电平的交替变化。当发送端为高电平时,第一端极的电势没有大于第二端极的电势,且其他未在触发状态的声纳单元的发送端保持在相对的高电平,因而当触发状态的声纳单元的发送端输出高电平时,数据采集模块的输入端也同样处于高电平。当触发状态的声纳单元的发送端输出低电平时,与该声纳单元对应设置的单向导通元件的第一端极的电势大于第二端极的电势,则该与触发状态的声纳单元对应设置的单向导通元件呈导通状态,而与其他未在触发状态的声纳单元所对应的单向导通元件则呈截止状态,因而数据采集模块的输入端处于低电平,并至少通过电阻元件而与电源正极维持电势差。因此,处于触发状态的声纳单元的发送端在电位上与数据采集模块的输入端保持同步,处于触发状态的声纳单元的声纳数据能唯一地输入至数据采集模块。通过数据采集模块先后发出不同的广播信息,则数据采集模块能够让不同的声纳单元依次进入触发状态,声纳单元在完成声纳数据的发送后自动地退出触发状态,则数据采集模块能够在使用较少端口的情况下接收更多声纳单元的声纳数据,从而有利于简化水下机器人的线路结构,并有利于降低对数据采集模块的硬件资源要求,有助于降低硬件成本。
7、在其中一个实施例中,所述单向导通元件包括二极管;所述二极管的正极作为第一端极,所述二极管的负极作为第二端极。
8、在其中一个实施例中,所述单向导通元件包括pnp型bjt管;所述pnp型bjt管的发射极作为第一端极,所述pnp型bjt管的基极作为第二端极。
9、在其中一个实施例中,所述声纳单元在发送端设有第一ttl串口;所述数据采集模块在输入端设有第二ttl串口;所述第一ttl串口与所述第二ttl串口之间信号连接。
10、在其中一个实施例中,所述声纳单元包括测距声纳元件;所述测距声纳元件与所述数据采集模块的分送端信号连接;所述测距声纳元件能够以串行数据形式发出声纳数据。
11、一种水下机器人,包括声纳数据采集装置。
12、在其中一个实施例中,还包括舱体及安装于舱体的推进器;所述数据采集模块安装于所述舱体,且所述数据采集模块与所述推进器之间至少形成能够触发所述推进器启动或停止的信号传递配合。
13、在其中一个实施例中,还包括电气线缆及岸上遥控装置;所述数据采集模块通过所述电气线缆电连接于所述岸上遥控装置。
技术特征:
1.一种声纳数据采集装置,其特征在于,包括:
2.根据权利要求1所述的声纳数据采集装置,其特征在于,所述单向导通元件包括二极管;所述二极管的正极作为所述第一端极,所述二极管的负极作为所述第二端极。
3.根据权利要求1所述的声纳数据采集装置,其特征在于,所述单向导通元件包括pnp型bjt管;所述pnp型bjt管的发射极作为所述第一端极,所述pnp型bjt管的基极作为所述第二端极。
4.根据权利要求1所述的声纳数据采集装置,其特征在于,所述声纳单元在发送端设有第一ttl串口;所述数据采集模块在输入端设有第二ttl串口;所述第一ttl串口与所述第二ttl串口之间信号连接。
5.根据权利要求1所述的声纳数据采集装置,其特征在于,所述声纳单元包括测距声纳元件;所述测距声纳元件与所述数据采集模块的分送端信号连接;所述测距声纳元件能够以串行数据形式发出声纳数据。
6.一种水下机器人,其特征在于,包括如权利要求1至5任意一项所述的声纳数据采集装置。
7.根据权利要求6所述的水下机器人,其特征在于,还包括舱体及安装于舱体的推进器;所述数据采集模块安装于所述舱体,且所述数据采集模块与所述推进器之间至少形成能够触发所述推进器启动或停止的信号传递配合。
8.根据权利要求6所述的水下机器人,其特征在于,还包括电气线缆及岸上遥控装置;所述数据采集模块通过所述电气线缆电连接于所述岸上遥控装置。
技术总结
本申请涉及一种声纳数据采集装置及水下机器人,声纳数据采集装置包括:声纳单元、数据采集模块及单向导通元件。声纳单元为多个。数据采集模块的分送端分别与各个声纳单元的接收端形成能够传递广播信息的信号连接。声纳单元的发送端能够在接收端收到相匹配的广播信息时以串行数据形式发出声纳数据。通过数据采集模块先后发出不同的广播信息,则数据采集模块能够让不同的声纳单元依次进入触发状态,声纳单元在完成声纳数据的发送后自动地退出触发状态,则数据采集模块能够在使用较少端口的情况下接收更多声纳单元的声纳数据,从而有利于简化水下机器人的线路结构,并有利于降低对数据采集模块的硬件资源要求,有助于降低硬件成本。
技术研发人员:陶冠润
受保护的技术使用者:深圳潜行创新科技有限公司
技术研发日:20240402
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!