一种无人驾驶车辆夜间障碍物感知与预警装置的制作方法
本技术涉及感知预警装置,具体为一种无人驾驶车辆夜间障碍物感知与预警装置。
背景技术:
1、无人驾驶车辆的安全自动驾驶,建立在对其所处环境精准感知的基础之上。在实际运行中,这些车辆主要依赖激光雷达和可见光双目立体相机来捕捉环境信息。激光雷达凭借其高精度的测量能力,能够准确地探测出障碍物的方向和距离,然而,它在辨识障碍物类型方面却显得力不从心。相比之下,双目立体相机虽然能够识别障碍物的种类,但在距离测算方面却存在着较大的误差和局限性。
2、目前,无人驾驶车辆大多在白天光线充足的条件下,巧妙地结合激光雷达和双目立体视觉,实现对环境的全面感知。然而,一旦进入夜间,传统可见光相机便失去了作用,导致无人驾驶车辆在黑暗中无法有效辨识障碍物的类型,这一局限性极大地制约了无人驾驶车辆的应用范围,使得其在夜间驾驶等场景下的应用受到了严重限制。
技术实现思路
1、本实用新型的目的在于提供一种无人驾驶车辆夜间障碍物感知与预警装置,解决基于可见光相机辨识障碍物的无人驾驶车辆夜间无法正常工作的问题,扩大无人驾驶车辆的应用范围。
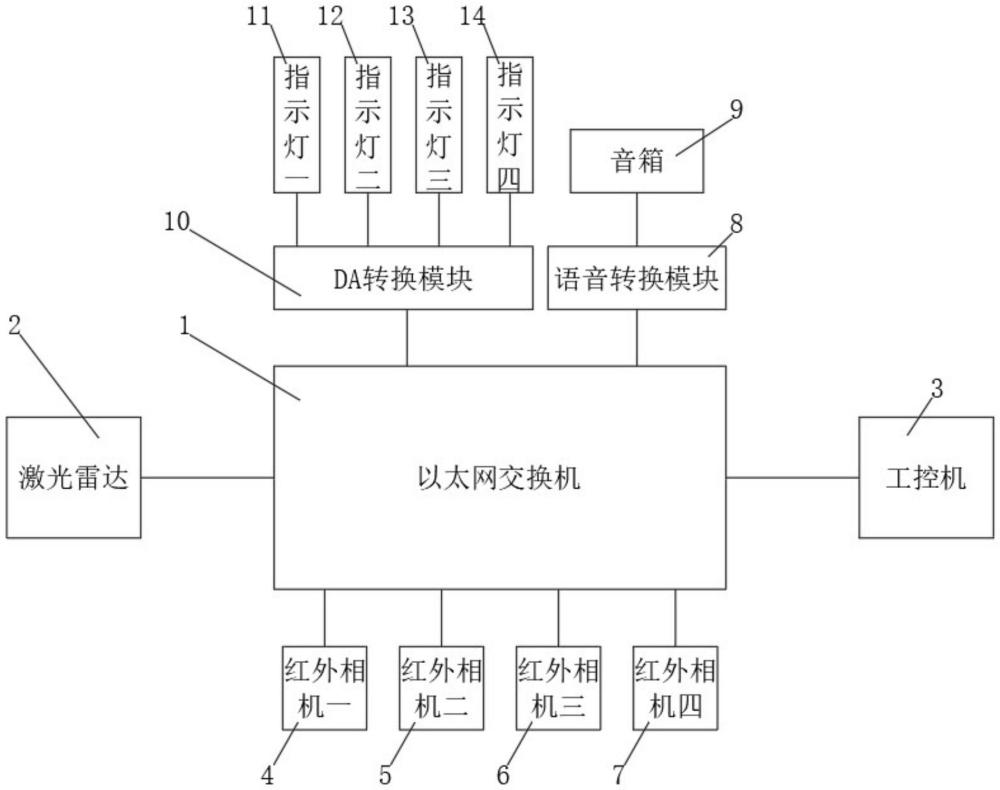
2、为实现上述目的,本实用新型提供如下技术方案:一种无人驾驶车辆夜间障碍物感知与预警装置,包括以太网交换机,所述以太网交换机的外侧通过网口连接有激光雷达,所述以太网交换机的外侧通过网口连接有工控机,所述以太网交换机的外侧通过网口连接有红外相机一,所述以太网交换机的外侧通过网口连接有红外相机二,所述以太网交换机的外侧通过网口连接有红外相机三,所述以太网交换机的外侧通过网口连接有红外相机四,所述以太网交换机的外侧通过导线连接有da转换模块,所述da转换模块上通过网口连接有指示灯一,所述da转换模块上通过网口连接有指示灯二,所述da转换模块上通过网口连接有指示灯三,所述da转换模块上通过网口连接有指示灯四。
3、优选的,所述工控机采用linux系统,所述以太网交换机具有多个lan口,速率为1000mbps。所述工控机作为核心计算单元,通过网口连接到以太网交换机上。
4、优选的,所述红外相机一、红外相机二、红外相机三、红外相机四的水平方向视场角均为90°,且波长8-14μm,所述红外相机一、红外相机二、红外相机三、红外相机四分别朝向不同方向,两两夹角为90°。通过设置红外相机一、红外相机二、红外相机三、红外相机四,用于采集不同方向上的夜间红外图像。
5、优选的,所述激光雷达测量距离不低于50m,精度不低于1cm,所述激光雷达位于红外相机一、红外相机二、红外相机三、红外相机四的中心位置并高于红外相机一、红外相机二、红外相机三、红外相机四的安装平面。通过设置激光雷达,获取各个方向上障碍物的精准距离。
6、优选的,所述以太网交换机的外侧通过导线连接有语音转换模块,所述语音转换模块上通过导线连接有音箱。通过网络向语音控制模块发文本指令,控制音箱发出相应语音信号。
7、本实用新型的有益效果如下:
8、本实用新型通过红外相机一、红外相机二、红外相机三、红外相机四识别障碍物,通过激光雷达感知障碍物的距离和方位,通过指示灯一、指示灯二、指示灯三、指示灯四和音箱发出灯光和声音预警信号,系统通过以太网连接,数据通信可靠,方便操作,能够实现夜间准确障碍物感知和预警。
技术特征:
1.一种无人驾驶车辆夜间障碍物感知与预警装置,包括以太网交换机(1),其特征在于:所述以太网交换机(1)的外侧通过网口连接有激光雷达(2),所述以太网交换机(1)的外侧通过网口连接有工控机(3),所述以太网交换机(1)的外侧通过网口连接有红外相机一(4),所述以太网交换机(1)的外侧通过网口连接有红外相机二(5),所述以太网交换机(1)的外侧通过网口连接有红外相机三(6),所述以太网交换机(1)的外侧通过网口连接有红外相机四(7),所述以太网交换机(1)的外侧通过导线连接有da转换模块(10),所述da转换模块(10)上通过网口连接有指示灯一(11),所述da转换模块(10)上通过网口连接有指示灯二(12),所述da转换模块(10)上通过网口连接有指示灯三(13),所述da转换模块(10)上通过网口连接有指示灯四(14)。
2.根据权利要求1所述的一种无人驾驶车辆夜间障碍物感知与预警装置,其特征在于:所述工控机(3)采用linux系统,所述以太网交换机(1)具有多个lan口,速率为1000mbps。
3.根据权利要求1所述的一种无人驾驶车辆夜间障碍物感知与预警装置,其特征在于:所述红外相机一(4)、红外相机二(5)、红外相机三(6)、红外相机四(7)的水平方向视场角均为90°,且波长8-14μm,所述红外相机一(4)、红外相机二(5)、红外相机三(6)、红外相机四(7)分别朝向不同方向,两两夹角为90°。
4.根据权利要求1所述的一种无人驾驶车辆夜间障碍物感知与预警装置,其特征在于:所述激光雷达(2)测量距离不低于50m,精度不低于1cm,所述激光雷达(2)位于红外相机一(4)、红外相机二(5)、红外相机三(6)、红外相机四(7)的中心位置并高于红外相机一(4)、红外相机二(5)、红外相机三(6)、红外相机四(7)的安装平面。
5.根据权利要求1所述的一种无人驾驶车辆夜间障碍物感知与预警装置,
技术总结
本技术公开了一种无人驾驶车辆夜间障碍物感知与预警装置,包括以太网交换机,以太网交换机的外侧通过网口连接有激光雷达,以太网交换机的外侧通过网口连接有工控机,以太网交换机的外侧通过网口连接有红外相机一,以太网交换机的外侧通过网口连接有红外相机二,以太网交换机的外侧通过网口连接有红外相机三,以太网交换机的外侧通过网口连接有红外相机四。本技术通过红外相机一、红外相机二、红外相机三、红外相机四识别障碍物,通过激光雷达感知障碍物的距离和方位,通过指示灯一、指示灯二、指示灯三、指示灯四和音箱发出灯光和声音预警信号,系统通过以太网连接,数据通信可靠,方便操作,能够实现夜间准确障碍物感知和预警。
技术研发人员:田光兆,邓昱,郑奎
受保护的技术使用者:顺为智能科技(常州)有限公司
技术研发日:20240416
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!