水下测速仪和水下航行器的制作方法
本技术涉及水下航行器,特别涉及一种水下测速仪和水下航行器。
背景技术:
1、水下航行器在水下运动过程中,需要获得航行器相对于海底的速度,目前,水下测量主要有两种手段:光学探测和声学探测,然而在水下,光波的传播衰减非常大,传播和测量的距离有限。相比之下,声波在水中的传播性能较好。声波在遇到水下目标后反射系数较大,有利于获取物体信息。
2、现有技术提供的水下测速仪是安装在机器人本体的底部,采用向下发射声波的方式来实现对机器人本体在水平方向运行速度的测量;因此,现有技术提供的水下测速仪在对纵向运行速度测量方面表现不佳。
技术实现思路
1、本实用新型的主要目的是提供一种水下测速仪和水下航行器,以加强对机器人本体纵向运动速度检测能力。
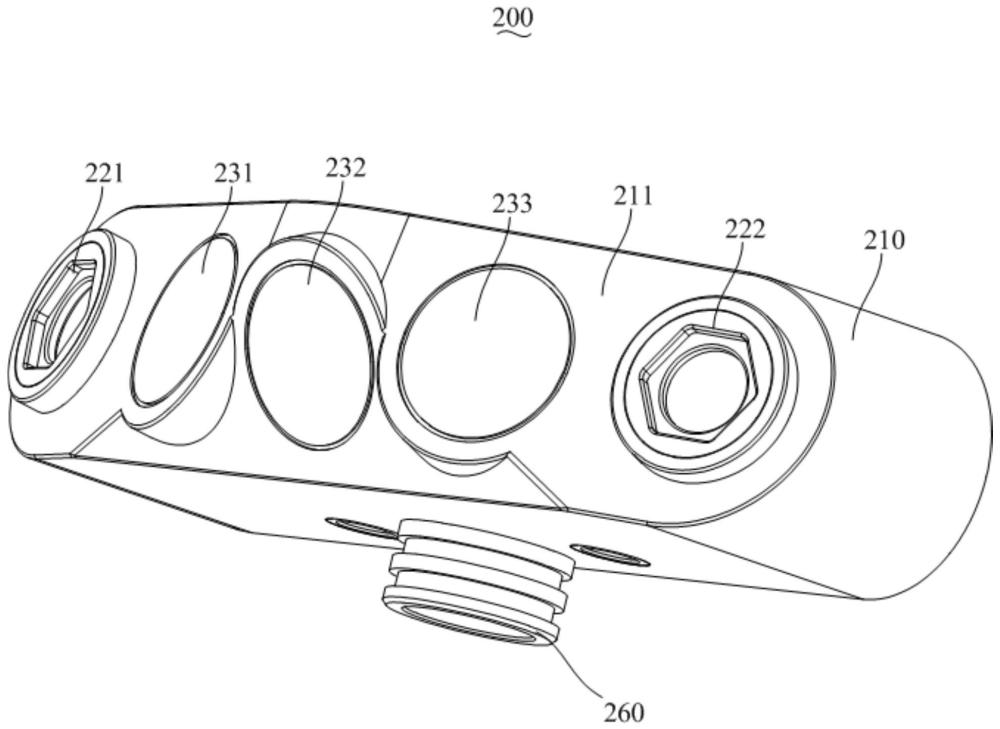
2、为实现上述目的,本实用新型提出的一种水下测速仪,包括:壳体和至少三个声波应答器,所述壳体具有收容空间,所述至少三个声波应答器设于所述收容空间内,所述至少三个声波应答器的发射端均显露于所述壳体的正面,且任意相邻的两个所述声波应答器的发射端的端面朝向不同。
3、可选地,所述水下测速仪包括第一声波应答器、第二声波应答器和第三声波应答器,所述第二声波应答器设置于所述第一声波应答器和所述第三声波应答器之间,所述第一声波应答器、所述第二声波应答器以及所述第三声波应答器的发射端面的中心点共线。
4、可选地,所述第一声波应答器的端面中心点、所述第二声波应答器的端面中心点以及所述第三声波应答器的发射端面中心点之间的连线呈一字型排布。
5、可选地,所述第一声波应答器与所述第三声波应答器的发射端的端面朝向不同。
6、可选地,所述水下测速仪包括第一声波应答器、第二声波应答器和第三声波应答器,所述第一声波应答器、所述第二声波应答器以及所述第三声波应答器的发射端面中心点之间的连线呈三角形排布。
7、可选地,所述水下测速仪还包括至少两个用于提供参考尺寸的激光发射器,所述激光发射器设于所述壳体的收容空间内;所述激光发射器的发射端显露于所述壳体的正面。
8、可选地,所述水下测速仪包括第一激光发射器和第二激光发射器,所述第一激光发射器设置于所述第一声波应答器相对于所述第二声波应答器的另一侧;所述第二激光发射器设置于所述第三声波应答器相对于所述第二声波应答器的另一侧。
9、可选地,所述激光发射器设置为三个,三个所述激光发射器的中心点连线形成三角形区域,所述第一声波应答器、所述第二声波应答器及所述第三声波应答器均处于所述三角形区域内。
10、可选地,所述水下测速仪还包括用于对待测目标进行拍摄的摄像装置;所述壳体的正面上开设有第一区域和第二区域;所述第一声波应答器、所述第二声波应答器以及所述第三声波应答器设于所述第一区域内;所述摄像装置设于所述第二区域内;所述第二区域设置在所述第一区域的上方或下方。
11、可选地,所述水下测速仪还包括用于提供光照补充的照明装置;所述壳体的正面上还开设有第三区域;所述照明装置设置于所述第三区域内,所述第三区域靠近所述第二区域设置。
12、可选地,所述水下测速仪还包括用于对待测目标进行拍摄的摄像装置、两个用于提供光照补充的照明装置以及两个用于提供参考尺寸的激光发射器;所述壳体的正面具有位于中间的第一区域及位于所述第一区域两侧对称设置的两个第二区域,所述摄像装置、所述第一声波应答器、所述第二声波应答器和所述第三声波应答器均设于所述第一区域内;所述摄像装置设于所述第一声波应答器、所述第二声波应答器和所述第三声波应答器的上方或下方;
13、所述照明装置和所述激光发射器的数量均设置为两个;每个所述第二区域内设置有一个所述照明装置以及一个所述激光发射器。
14、可选地,所述水下测速仪还具有用于与机器人本体相连接的安装结构,所述安装结构能够被设置在所述壳体的顶面、底面、背面以及侧面上的任意位置。
15、本实用新型还提供一种水下航行器,包括:
16、如上所述的水下测速仪;和
17、机器人本体,所述水下测速仪固定或活动安装在所述机器人本体的本体上,所述水下测速仪的正面朝向与所述机器人本体的正面朝向保持一致;所述机器人本体根据所述水下测速仪测量的数据动态的对所述机器人本体的姿态进行调节。
18、本实用新型技术方案提供的水下测速仪,首先,最少仅仅通过三个声波应答器就能够完成对机器人本体速度的探测;其次,采用相邻两个声波应答器的发射端的端面朝向不同的设计,有效的避免了探测面积过度重叠的问题;并且由于三个声波应答器的端部是显露在壳体正面上的,经由声波应答器所发射的声波并非直接朝水下环境中的底部方向进行扩散传播,而是沿着水平或接近水平方向扩散传播,使得整体探测面与机器人本体在水下环境中的前进方向保持一致,进一步满足了对机器人本体在水下纵向的速度测量,为机器人本体提供高精度的速度信息和距离信息。
技术特征:
1.一种水下测速仪,其特征在于,包括:壳体和至少三个声波应答器,所述壳体具有收容空间,所述至少三个声波应答器设于所述收容空间内,所述至少三个声波应答器的发射端均显露于所述壳体的正面,且任意相邻的两个所述声波应答器的发射端的端面朝向不同。
2.如权利要求1所述的水下测速仪,其特征在于,所述水下测速仪包括第一声波应答器、第二声波应答器和第三声波应答器,所述第二声波应答器设置于所述第一声波应答器和所述第三声波应答器之间,所述第一声波应答器、所述第二声波应答器以及所述第三声波应答器的发射端面的中心点共线。
3.如权利要求2所述的水下测速仪,其特征在于,所述第一声波应答器的端面中心点、所述第二声波应答器的端面中心点以及所述第三声波应答器的发射端面中心点之间的连线呈一字型排布。
4.如权利要求2所述的水下测速仪,其特征在于,所述第一声波应答器与所述第三声波应答器的发射端的端面朝向不同。
5.如权利要求1所述的水下测速仪,其特征在于,所述水下测速仪包括第一声波应答器、第二声波应答器和第三声波应答器,所述第一声波应答器、所述第二声波应答器以及所述第三声波应答器的发射端面中心点之间的连线呈三角形排布。
6.如权利要求2至4中任一项所述的水下测速仪,其特征在于,所述水下测速仪还包括至少两个用于提供参考尺寸的激光发射器,所述激光发射器设于所述壳体的收容空间内;所述激光发射器的发射端显露于所述壳体的正面。
7.如权利要求6所述的水下测速仪,其特征在于,所述水下测速仪包括第一激光发射器和第二激光发射器,所述第一激光发射器设置于所述第一声波应答器相对于所述第二声波应答器的另一侧;所述第二激光发射器设置于所述第三声波应答器相对于所述第二声波应答器的另一侧。
8.如权利要求6所述的水下测速仪,其特征在于,所述激光发射器设置为三个,三个所述激光发射器的中心点连线呈三角形。
9.如权利要求2至5中任一项所述的水下测速仪,其特征在于,所述水下测速仪还包括用于对待测目标进行拍摄的摄像装置;所述壳体的正面上开设有第一区域和第二区域;所述第一声波应答器、所述第二声波应答器以及所述第三声波应答器设于所述第一区域内;所述摄像装置设于所述第二区域内;所述第二区域设置在所述第一区域的上方或下方。
10.如权利要求9所述的水下测速仪,其特征在于,所述水下测速仪还包括用于提供光照补充的照明装置;所述壳体的正面上还开设有第三区域;所述照明装置设置于所述第三区域内,所述第三区域靠近所述第二区域设置。
11.如权利要求2至5中任一项所述的水下测速仪,其特征在于,所述水下测速仪还包括用于对待测目标进行拍摄的摄像装置、两个用于提供光照补充的照明装置以及两个用于提供参考尺寸的激光发射器;所述壳体的正面具有位于中间的第一区域及位于所述第一区域两侧对称设置的两个第二区域,所述摄像装置、所述第一声波应答器、所述第二声波应答器和所述第三声波应答器均设于所述第一区域内;所述摄像装置设于所述第一声波应答器、所述第二声波应答器和所述第三声波应答器的上方或下方;
12.如权利要求1所述的水下测速仪,其特征在于,所述水下测速仪还具有用于与机器人本体相连接的安装结构,所述安装结构能够被设置在所述壳体的顶面、底面、背面以及侧面上的任意位置。
13.一种水下航行器,其特征在于,包括:
技术总结
本技术公开一种水下测速仪和水下航行器,该水下测速仪包括壳体和设于壳体内的至少三个声波应答器,至少三个声波应答器的发射端均显露于壳体的正面,任意相邻的两个声波应答器的发射端面朝向不同。本技术技术方案提供的水下测速仪,最少仅仅通过三个声波应答器就能够完成对机器人本体速度的探测;采用相邻两个声波应答器的发射端的端面朝向不同的设计,有效的避免了探测面积过度重叠的问题;并且由于各声波应答器的端部是显露在壳体正面上的,经由声波应答器所发射的声波相对更加趋向于朝水平方向,使得整体探测面与机器人本体的前进方向保持一致,进一步满足了对机器人本体在水下纵向的速度测量。
技术研发人员:唐俊平,张翀,钟卓如
受保护的技术使用者:深圳鳍源科技有限公司
技术研发日:20240513
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!