一种无人驾驶车辆爬坡测试装置的制作方法
本技术属于无人驾驶车辆,具体涉及一种无人驾驶车辆爬坡测试装置。
背景技术:
1、无人驾驶车辆是一种智能车辆,主要依靠车内的以计算机系统为主的智能驾驶系统来实现无人驾驶,无人驾驶汽车集自动控制、环境交互、视觉识别等众多人工智能技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物。
2、无人驾驶车辆在爬坡测试过程中,需要用到爬坡测试装置,目前爬坡测试装置上的坡道角度大多是固定的,致使车辆只可在指定的角度进行测试,当需要进行不同坡度测试时,需要更换测试装置,导致其无法满足不同车辆爬坡测试的需求,降低了其实用性,其次在测试的过程中,装置的重心升高,极易出现晃动的情况,甚至出现倾倒的情况,存在极大的安全隐患,因此,我们提供一种无人驾驶车辆爬坡测试装置。
技术实现思路
1、本实用新型的目的在于提供一种无人驾驶车辆爬坡测试装置,通过电机、螺纹套、螺纹杆、横板、第一活动轴、第二活动轴、活动杆、导向块和铰接轴的设置,配合连接柱、接地板和电动伸缩杆进行使用,以解决上述背景技术中提出的问题。
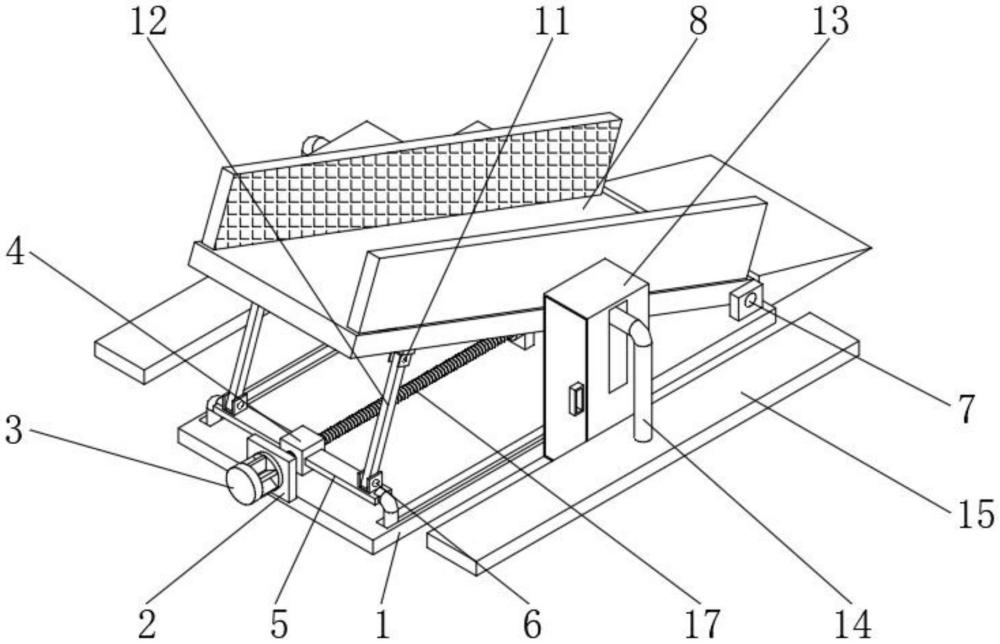
2、为实现上述目的,本实用新型提供如下技术方案:一种无人驾驶车辆爬坡测试装置,包括基板,所述基板的左侧固定连接有竖板,所述竖板的一侧固定安装有电机,所述电机的输出端固定连接有螺纹杆,所述螺纹杆表面的一侧螺纹连接有螺纹套,所述螺纹套的正表面和背面均固定连接有横板,所述横板顶部的一端固定连接有第一活动轴,所述基板顶部右侧的前端和后端均固定连接有铰接轴,所述铰接轴的内侧铰接有测试板,所述测试板底部的前端和后端均开设有导向槽,所述导向槽的内壁滑动连接有导向块,所述导向块的底部固定连接有第二活动轴,所述第二活动轴和第一活动轴之间通过活动杆进行铰接。
3、采用上述方案,通过电机带动螺纹杆进行转动,通过螺纹杆带动螺纹套横向移动,通过螺纹套带动横板进行移动,通过横板带动第一活动轴进行移动,通过第一活动轴在活动杆的配合下带动第二活动轴横向移动,通过第二活动轴带动导向块在导向槽的内壁中横向滑动,在移动的过程中,并配合铰接轴进行使用,从而改变测试板的角度,达到调节坡度的目的,使得装置可适用于不同坡度车辆的测试。
4、作为一种无人驾驶车辆爬坡测试装置优选的实施方式,所述基板的右侧固定连接有过渡板,且过渡板的顶部呈斜面。
5、采用上述方案,通过过渡板的设置,因过渡板顶部呈斜面,可使得车辆快速行驶至测试板上,达到辅助上坡的目的。
6、作为一种无人驾驶车辆爬坡测试装置优选的实施方式,所述基板正表面和背面均固定连接有壳体,所述壳体内腔的底部固定连接有电动伸缩杆,所述电动伸缩杆的顶部固定连接有连接柱,所述连接柱的一端且位于壳体的外部固定连接有接地板。
7、采用上述方案,通过电动伸缩杆带动连接柱向下移动,通过连接柱带动接地板向下移动,直至接地板的底部与地面接触,增加了装置的接地面积,提高了装置的稳定性,减少装置出现晃动的情况。
8、作为一种无人驾驶车辆爬坡测试装置优选的实施方式,所述螺纹杆的一端活动连接有轴承,且轴承的一侧固定连接有固定板。
9、采用上述方案,通过轴承的设置,对螺纹杆进行限位和支撑,防止螺纹杆出现悬空的状态,减少螺纹杆工作时的抖动。
10、作为一种无人驾驶车辆爬坡测试装置优选的实施方式,所述壳体内腔一侧的顶部开设有滑槽,所述连接柱的一端与滑槽的内壁滑动连接。
11、采用上述方案,通过滑槽的设置,对连接柱进行限位,达到辅助移动的目的,提高了装置运行时的流畅性。
12、作为一种无人驾驶车辆爬坡测试装置优选的实施方式,所述测试板顶部的前端和后端均固定连接有挡板,且挡板的内侧粘接有防护垫。
13、采用上述方案,通过挡板的设置,对测试车辆进行防护,防止从测试板上冲出。
14、与现有技术相比,本实用新型的有益效果是:
15、1、本实用新型通过电机带动螺纹杆进行转动,通过螺纹杆带动螺纹套横向移动,通过螺纹套带动横板进行移动,通过横板带动第一活动轴进行移动,通过第一活动轴在活动杆的配合下带动第二活动轴横向移动,通过第二活动轴带动导向块在导向槽的内壁中横向滑动,在移动的过程中,并配合铰接轴进行使用,从而改变测试板的角度,达到调节坡度的目的,使得装置可适用于不同坡度车辆的测试。
16、2、本实用新型通过电动伸缩杆带动连接柱向下移动,通过连接柱带动接地板向下移动,直至接地板的底部与地面接触,增加了装置的接地面积,提高了装置的稳定性,减少装置出现晃动的情况。
技术特征:
1.一种无人驾驶车辆爬坡测试装置,其特征在于:包括基板(1),所述基板(1)的左侧固定连接有竖板(2),所述竖板(2)的一侧固定安装有电机(3),所述电机(3)的输出端固定连接有螺纹杆(17),所述螺纹杆(17)表面的一侧螺纹连接有螺纹套(4),所述螺纹套(4)的正表面和背面均固定连接有横板(5),所述横板(5)顶部的一端固定连接有第一活动轴(6),所述基板(1)顶部右侧的前端和后端均固定连接有铰接轴(7),所述铰接轴(7)的内侧铰接有测试板(8),所述测试板(8)底部的前端和后端均开设有导向槽(9),所述导向槽(9)的内壁滑动连接有导向块(10),所述导向块(10)的底部固定连接有第二活动轴(11),所述第二活动轴(11)和第一活动轴(6)之间通过活动杆(12)进行铰接。
2.根据权利要求1所述的一种无人驾驶车辆爬坡测试装置,其特征在于:所述基板(1)的右侧固定连接有过渡板,且过渡板的顶部呈斜面。
3.根据权利要求1所述的一种无人驾驶车辆爬坡测试装置,其特征在于:所述基板(1)正表面和背面均固定连接有壳体(13),所述壳体(13)内腔的底部固定连接有电动伸缩杆(16),所述电动伸缩杆(16)的顶部固定连接有连接柱(14),所述连接柱(14)的一端且位于壳体(13)的外部固定连接有接地板(15)。
4.根据权利要求1所述的一种无人驾驶车辆爬坡测试装置,其特征在于:所述螺纹杆(17)的一端活动连接有轴承,且轴承的一侧固定连接有固定板。
5.根据权利要求3所述的一种无人驾驶车辆爬坡测试装置,其特征在于:所述壳体(13)内腔一侧的顶部开设有滑槽,所述连接柱(14)的一端与滑槽的内壁滑动连接。
6.根据权利要求1所述的一种无人驾驶车辆爬坡测试装置,其特征在于:所述测试板(8)顶部的前端和后端均固定连接有挡板,且挡板的内侧粘接有防护垫。
技术总结
本技术公开了一种无人驾驶车辆爬坡测试装置,属于无人驾驶车辆技术领域,包括基板,所述基板的左侧固定连接有竖板,所述竖板的一侧固定安装有电机,所述电机的输出端固定连接有螺纹杆,所述螺纹杆表面的一侧螺纹连接有螺纹套。本技术通过电机带动螺纹杆进行转动,通过螺纹杆带动螺纹套横向移动,通过螺纹套带动横板进行移动,通过横板带动第一活动轴进行移动,通过第一活动轴在活动杆的配合下带动第二活动轴横向移动,通过第二活动轴带动导向块在导向槽的内壁中横向滑动,在移动的过程中,并配合铰接轴进行使用,从而改变测试板的角度,达到调节坡度的目的,使得装置可适用于不同坡度车辆的测试。
技术研发人员:杨明
受保护的技术使用者:邓德娥
技术研发日:20240605
技术公布日:2025/3/16
- 还没有人留言评论。精彩留言会获得点赞!