一种机器人抓取称重装置的制作方法
本技术属于机械自动化领域,具体为一种可以便于调节的机器人抓取称重装置。
背景技术:
1、在工业自动化的企业中,对于机加工设备出料后的工件,需要对其测量重量,常规的测量方式通常是在成批的工件加工好之后,统一进行逐一测量,这种测量方式会比较繁琐,费时费力,也有的会进行统一称重,然后除以工件的总数,取其均值,但是在生产企业里面,同一形状的工件也会存在尺寸大小的偏差,在某些特定的行业里面,有微小的重量差距也会对整个工件的后续安装造成影响,避免不了误差,使用不方便。
技术实现思路
1、本实用新型所要解决的技术问题在于提供一种自动化程度高、能有效对工件重量进行判断的机器人抓取称重装置。
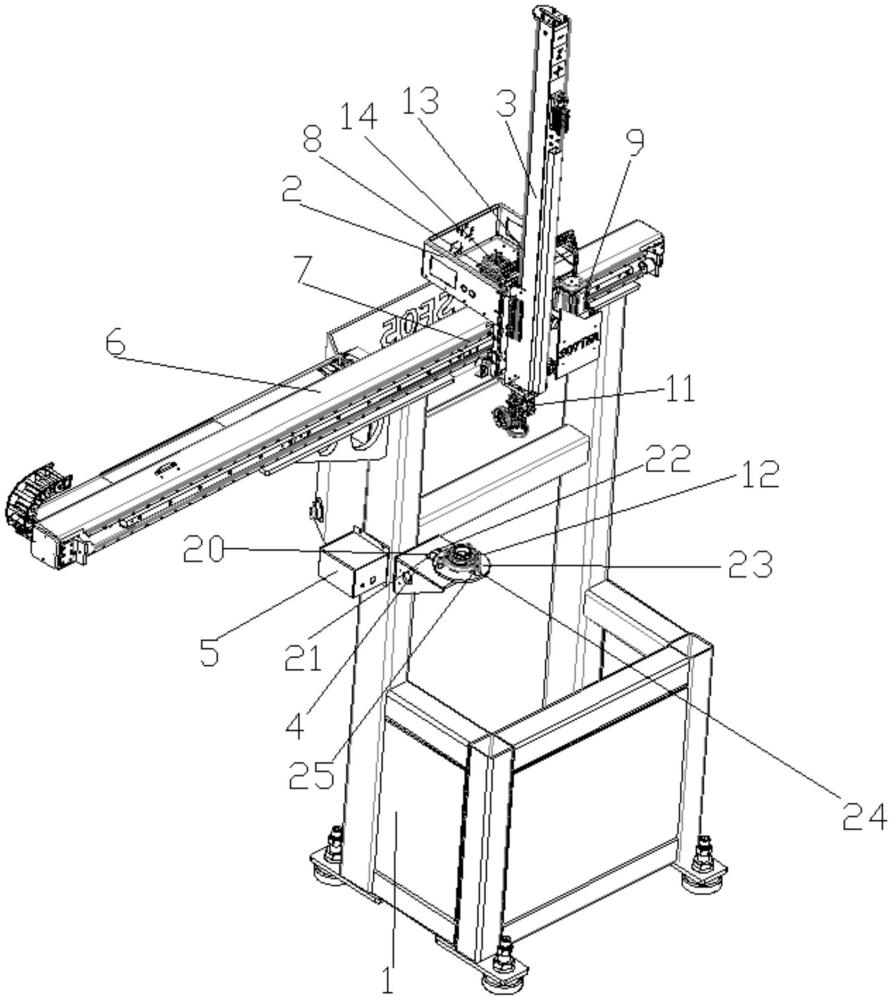
2、为解决上述现有的技术问题,本实用新型采用如下方案:一种机器人抓取称重装置,包括支架本体、移动架、升降架、称重本体以及称重显示装置,所述支架本体上安装有支撑底座,支撑底座上通过轨道与移动架连接,移动架背面安装有横向电机,横向电机穿过移动架后与升降架连接,升降架侧面设有纵向电机,纵向电机通过齿轮轴与轨道内侧的内齿条相连接,所述升降架底部安装有抓取结构,抓取结构位于称重本体上方,称重本体上安装有安装夹具,称重本体安装在支架本体上,支架本体侧面安装有称重显示装置。
3、作为优选,所述升降架一侧设有滑槽,滑槽与滑块卡接连接,滑块安装在移动架表面,升降架的另一侧设有外齿条,外齿条与齿轮啮合连接,齿轮通过连接件安装在移动架上。
4、作为优选,所述抓取结构由抓取底座与若干夹爪构成,夹爪位于抓取底座的底部以及侧面。
5、作为优选,所述称重本体表面设有安装槽,安装槽上安装有支撑块,支撑块通过安装块与安装盘连接,安装盘表面安装有若干夹持柱,夹持柱之间固定有工件。
6、作为优选,所述安装盘上设有若干调节槽,夹持柱穿过调节槽后与限位块连接。
7、作为优选,所述支撑块与安装块之间以及安装块与安装盘之间均安装有垫片。
8、本实用新型采用了上述技术方案提供一种机器人抓取称重装置,与现有的技术相比,具有如下优点:
9、1、通过多个电机可以驱动移动架以及升降架进行调节,便于对工件进行抓取、称重;
10、2、通过安装盘上的调节槽可以对夹持柱的位置进行调节,便于对不同尺寸的工件进行安装。
技术特征:
1.一种机器人抓取称重装置,包括支架本体(1)、移动架(2)、升降架(3)、称重本体(4)以及称重显示装置(5),其特征在于:所述支架本体(1)上安装有支撑底座(6),支撑底座(6)上通过轨道(7)与移动架(2)连接,移动架(2)背面安装有横向电机(8),横向电机(8)穿过移动架(2)后与升降架(3)连接,升降架(3)侧面设有纵向电机(9),纵向电机(9)通过齿轮轴(10)与轨道(7)内侧的内齿条(11)相连接,所述升降架(3)底部安装有抓取结构(12),抓取结构(12)位于称重本体(4)上方,称重本体(4)安装在支架本体(1)上,支架本体(1)侧面安装有称重显示装置(5)。
2.根据权利要求1所述的机器人抓取称重装置,其特征在于:所述升降架(3)一侧设有滑槽(13),滑槽(13)与滑块(14)卡接连接,滑块(14)安装在移动架(2)表面,升降架(3)的另一侧设有外齿条(15),外齿条(15)与齿轮(16)啮合连接,齿轮(16)通过连接件(17)安装在移动架(2)上。
3.根据权利要求1所述的机器人抓取称重装置,其特征在于:所述抓取结构(12)由抓取底座(18)与若干夹爪(19)构成,夹爪(19)位于抓取底座(18)的底部以及侧面。
4.根据权利要求1所述的机器人抓取称重装置,其特征在于:所述称重本体(4)表面设有安装槽(20),安装槽(20)上安装有支撑块(21),支撑块(21)通过安装块(22)与安装盘(23)连接,安装盘(23)表面安装有若干夹持柱(24),夹持柱(24)之间固定有工件。
5.根据权利要求4所述的机器人抓取称重装置,其特征在于:所述安装盘(23)上设有若干调节槽(25),夹持柱(24)穿过调节槽(25)后与限位块(26)连接。
6.根据权利要求4所述的机器人抓取称重装置,其特征在于:所述支撑块(21)与安装块(22)之间以及安装块(22)与安装盘(23)之间均安装有垫片(27)。
技术总结
本技术公开一种机器人抓取称重装置,包括支架本体、移动架、升降架、称重本体以及称重显示装置,所述支架本体上安装有支撑底座,支撑底座上通过轨道与移动架连接,移动架背面安装有横向电机,横向电机穿过移动架后与升降架连接,升降架侧面设有纵向电机,纵向电机通过齿轮轴与轨道内侧的内齿条相连接,所述升降架底部安装有抓取结构,抓取结构位于称重本体上方,称重本体上安装有安装夹具,称重本体安装在支架本体上,支架本体侧面安装有称重显示装置,本技术的有益效果:结构设计合理、便于对规格不一的工件进行抓取、称重、检测。
技术研发人员:唐海定
受保护的技术使用者:杭州硕唐科技有限公司
技术研发日:20240614
技术公布日:2025/3/18
- 还没有人留言评论。精彩留言会获得点赞!