基于文丘里管的低动压风速风向仪
本发明涉及的是一种临近空间风速风向测量领域的技术,具体是一种基于文丘里管的压差间接获取风速的风速风向仪。
背景技术:
1、临近空间低动态飞行器包括临近空间飞艇和无人机。与常规的航空器相比,临近空间低动态飞行器由于其驻空高度高,大气密度小,飞行器的飞行速度低,对其空速或环境风速的测量始终是需要解决的关键问题。采用航空常用的测试方法,由于动压较小,常规的基于动压的测试传感器难以满足使用要求。
技术实现思路
1、本发明针对现有技术无法在低大气密度低速环境下使用,无法同时测量飞行器的空速以及来流的风速和风向且测量范围受限的不足,提出一种基于文丘里管的风速风向仪,采用文丘里管实现压差的有效放大,通过压力传感器测得入口和管道中的压差,然后通过理论换算和计算流体力学的数值仿真修正得到真实的来流速度,无需复杂的机械结构,具有结构简单,尺寸小,重量轻,功耗低,安装方便,风速风向测量范围宽优点。
2、本发明是通过以下技术方案实现的:
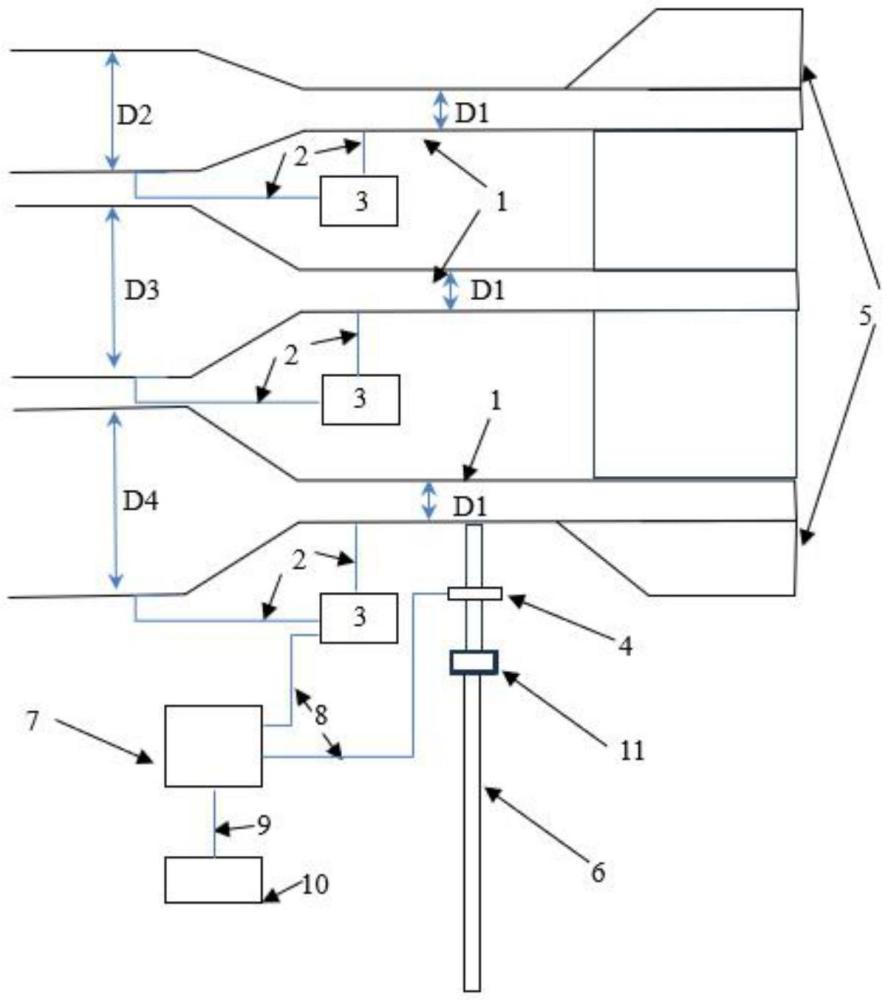
3、本发明涉及一种基于文丘里管的低动压的风速风向仪,包括:多个不同规格的文丘里管以及设置于文丘里管尾部的尾翼、姿态传感器和压差传感器,其中:压差传感器通过测压管路分别检测文丘里管上不同位置的压力信息,姿态传感器检测文丘里管受尾翼驱动的转动信息,姿态传感器和压差传感器分别与数据采集和处理模块相连,通过数据采集和处理模块计算得到当前的空速,以及来流的风速风向。
4、所述的数据采集和处理模块包括:姿态数据采集单元、压差数据采集单元、姿态数据处理单元以及压差数据处理单元,其中:姿态数据采集单元根据姿态传感器的信息,进行姿态数据的收集处理,得到俯仰、偏航和滚转角结果,压差数据采集单元根据压差传感器的信息,进行各管路上的压差比较处理,得到最终的压差数据结果,姿态数据处理单元根据俯仰、偏航和滚转角数据,进行坐标变换处理,得到机体坐标系下的转换矩阵以及风向的结果,压差数据处理单元根据压差数据,进行压差到速度的转换处理,得到空速、风速结果。
5、技术效果
6、本发明采用文丘里原理实现临近空间低动态飞行器空速/风速以及风向的精确测量,基于文丘里管实现压差的有效放大,通过压力传感器测得入口和管道中的压差后,通过换算得到真实的来流空速,并通过飞行器的地速得到环境风速。本发明无需复杂的机械结构,具有结构简单,尺寸小(最大尺寸10cm),重量轻(200g),功耗低(0.1w),安装方便,可测量1.0~40m/s的风速,以及0-360度整个风向范围,测量范围宽的优点。
技术特征:
1.一种基于文丘里管的低动压风速风向仪,其特征在于,包括:多个不同规格的文丘里管以及设置于文丘里管尾部的尾翼、姿态传感器和压差传感器,其中:压差传感器通过测压管路分别检测文丘里管上不同位置的压力信息,姿态传感器检测文丘里管受尾翼驱动的转动信息,姿态传感器和压差传感器分别与数据采集和处理模块相连,通过数据采集和处理模块计算得到当前的空速,以及来流的风速风向。
2.根据权利要求1所述的基于文丘里管的低动压风速风向仪,其特征是,所述的数据采集和处理模块包括:姿态数据采集单元、压差数据采集单元、姿态数据处理单元以及压差数据处理单元,其中:姿态数据采集单元根据姿态传感器的信息,进行姿态数据的收集处理,得到俯仰、偏航和滚转角结果,压差数据采集单元根据压差传感器的信息,进行各管路上的压差比较处理,得到最终的压差数据结果,姿态数据处理单元根据俯仰、偏航和滚转角数据,进行坐标变换处理,得到机体坐标系下的转换矩阵以及风向的结果,压差数据处理单元根据压差数据,进行压差到速度的转换处理,得到空速、风速结果。
技术总结
一种基于文丘里管的风速风向仪,包括:多个不同规格的文丘里管以及设置于文丘里管尾部的尾翼、姿态传感器和压差传感器,其中:压差传感器通过测压管路分别检测文丘里管上不同位置的压力信息,姿态传感器检测文丘里管受尾翼驱动的转动信息,姿态传感器和压差传感器分别与数据采集和处理模块相连,通过数据采集和处理模块计算得到当前的空速,以及来流的风速风向。本发明采用文丘里管实现压差的有效放大,通过压力传感器测得入口和管道中的压差,然后通过理论换算和计算流体力学的数值仿真修正得到真实的来流速度,无需复杂的机械结构,具有结构简单,尺寸小,重量轻,功耗低,安装方便,风速风向测量范围宽优点。
技术研发人员:王晓亮
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2025/3/24
- 还没有人留言评论。精彩留言会获得点赞!