视场角异常识别方法、装置、存储介质及MEMS激光雷达与流程
本申请涉及计算机领域,尤其涉及一种视场角异常识别方法、装置、存储介质及mems激光雷达。
背景技术:
1、微机电系统(micro-electro-mechanical system,mems)激光雷达因体积小,价格低廉,适合大规模应用。在mems激光雷达中安装有振镜,mems激光雷达的探测范围大小与振镜的视场角(field of view,fov)密切相关,在mems使用过程中,fov可能会因为器件性能衰减或者环境恶劣等原因,导致出现偏大或者偏小的状况,从而影响到激光雷达的探测范围。
技术实现思路
1、本申请实施例提供了视场角异常识别方法、装置、存储介质及mems激光雷达,通过在mems激光雷达启动时和运行过程中检测振镜的视场角是否异常,从而避免因振镜的视场角出现异常而导致的安全问题,提高了mems激光雷达的安全性和可靠性。本技术方案如下:
2、第一方面,本申请实施例提供了一种视场角异常识别方法,所述方法包括:
3、在mems激光雷达启动时,分别调整所述振镜在x轴和y轴的角度;
4、获取以调整后的所述振镜在x轴和y轴的角度扫描窗口片边沿所产生的回波数据;
5、获取所述回波数据中窗口片上沿、窗口片下沿、窗口片左沿以及窗口片右沿与所述mems激光雷达之间的距离;
6、基于所述窗口片上沿、窗口片下沿、窗口片左沿以及窗口片右沿与所述mems激光雷达之间的距离,确定所述振镜的视场角是否异常。
7、第二方面,本申请实施例提供了一种视场角异常识别方法,所述方法包括:
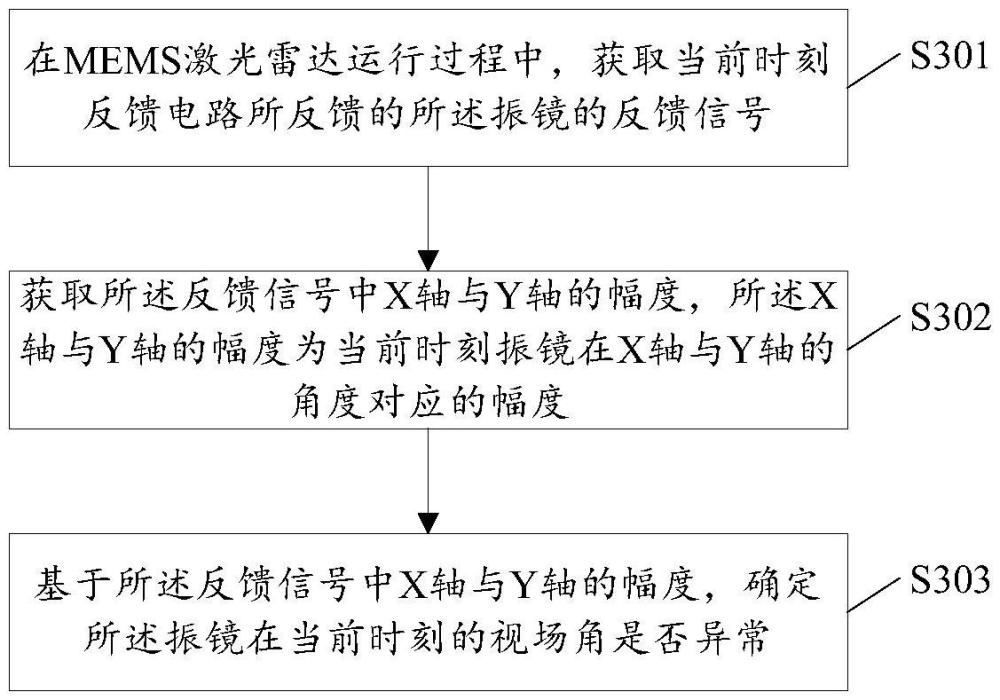
8、在mems激光雷达运行过程中,获取当前时刻反馈电路所反馈的所述振镜的反馈信号;
9、获取所述反馈信号中x轴与y轴的幅度,所述x轴与y轴的幅度为当前时刻振镜在x轴与y轴的角度对应的幅度;
10、基于所述反馈信号中x轴与y轴的幅度,确定所述振镜在当前时刻的视场角是否异常。
11、第三方面,本申请实施例提供了一种视场角异常识别装置,所述装置包括:
12、角度调整模块,用于在mems激光雷达启动时,分别调整所述振镜在x轴和y轴的角度;
13、数据获取模块,用于获取以调整后的所述振镜在x轴和y轴的角度扫描窗口片所产生的回波数据;
14、距离获取模块,用于获取所述回波数据中窗口片上沿、窗口片下沿、窗口片左沿以及窗口片右沿与所述mems激光雷达之间的距离;
15、视场角判定模块,用于基于所述窗口片上沿、窗口片下沿、窗口片左沿以及窗口片右沿与所述mems激光雷达之间的距离,确定所述振镜的视场角是否异常。
16、第四方面,本申请实施例提供了一种视场角异常识别装置,所述装置包括:
17、信号获取模块,用于在mems激光雷达运行过程中,获取当前时刻反馈电路所反馈的所述振镜的反馈信号;
18、幅度获取模块,用于获取所述反馈信号中x轴与y轴的幅度,所述x轴与y轴的幅度为当前时刻振镜在x轴与y轴的角度对应的幅度;
19、视场角判定模块,用于基于所述反馈信号中x轴与y轴的幅度,确定所述振镜在当前时刻的视场角是否异常。
20、第五方面,本申请实施例提供了一种计算机存储介质,所述计算机存储介质存储有多条指令,所述指令适于由处理器加载并执行上述的方法步骤。
21、第六方面,本申请实施例提供一种mems激光雷达,可包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序适于由所述处理器加载并执行上述的方法步骤。
22、本申请实施例提供的技术方案带来的有益效果至少包括:
23、在本申请实施例中,通过对获取mems激光雷达运行过程中振镜在x轴和y轴的幅度,将振镜在x轴和y轴的幅度与对应的参考幅度范围进行对比,判断振镜在当前时刻的视场角是否异常。通过本申请实施例提供的技术方案,能够实时判断mems激光雷达运行过程中振镜的视场角是否异常,从而避免因振镜的视场角出现异常而导致的安全问题,提高了mems激光雷达的安全性和可靠性。
技术特征:
1.一种视场角异常识别方法,其特征在于,应用于mems激光雷达,所述mems激光雷达包括振镜,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述反馈信号中x轴与y轴的幅度,确定所述振镜在当前时刻的视场角是否异常,包括:
3.根据权利要求2所述的方法,其特征在于,所述若所述振镜在x轴以及y轴的幅度均在对应的参考幅度范围内,则确定所述振镜在当前时刻的视场角正常,包括:
4.根据权利要求1所述的方法,其特征在于,所述基于所述反馈信号中x轴与y轴的幅度,确定所述振镜在当前时刻的视场角是否异常之后,还包括:
5.一种视场角异常识别装置,其特征在于,应用于mems激光雷达,所述mems激光雷达包括振镜,所述装置包括:
6.根据权利要求5所述的装置,其特征在于,所述视场角判定模块,包括:
7.根据权利要求6所述的装置,其特征在于,所述视场角判定单元,包括:
8.根据权利要求5所述的装置,其特征在于,所装置还包括:
9.一种计算机存储介质,其特征在于,所述计算机存储介质有多条指令,所述指令适于由处理器加载并执行如权利要求1~4任意一项的方法步骤。
10.一种mems激光雷达,其特征在于,包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序适于所述处理器加载并执行如权利要求1~4任意一项的方法步骤。
技术总结
本申请公开了一种视场角异常识别方法、装置、存储介质及MEMS激光雷达,其中方法包括:在MEMS激光雷达运行过程中,获取当前时刻反馈电路所反馈的所述振镜的反馈信号;获取所述反馈信号中X轴与Y轴的幅度,所述X轴与Y轴的幅度为当前时刻振镜在X轴与Y轴的角度对应的幅度;基于所述反馈信号中X轴与Y轴的幅度,确定所述振镜在当前时刻的视场角是否异常。本申请实施例提供的技术方案使得能够在MEMS激光雷达运行时检测到振镜的视场角异常,从而避免因振镜的视场角出现异常而导致的安全问题,提高了MEMS激光雷达的安全性和可靠性。
技术研发人员:史照辉
受保护的技术使用者:深圳市速腾聚创科技有限公司
技术研发日:
技术公布日:2025/4/10
- 还没有人留言评论。精彩留言会获得点赞!