测量折弯机刚度的方法、电子设备和计算机可读存储介质与流程
本申请属于折弯机领域,具体涉及一种测量折弯机刚度的方法、电子设备和计算机可读存储介质。
背景技术:
1、折弯机刚度表示折弯机在折弯出力时,机架自身受反作用力而变形的程度。
2、目前,可采用折弯钣金测量折弯机刚度。具体地,可通过对长板和短板分别折弯相同角度来测量折弯机刚度。
3、然而,通过对长板和短板分别折弯相同角度的折弯机刚度测量方式需要长板和短板的介入,导致刚度测量较为繁琐,测量效率较低。
技术实现思路
1、本申请实施例提供一种测量折弯机刚度的方法、电子设备和计算机可读存储介质,能够解决通过对长板和短板分别折弯相同角度的折弯机刚度测量方式需要长板和短板的介入,导致刚度测量较为繁琐,测量效率较低的问题。
2、第一方面,本申请实施例提供了一种测量折弯机刚度的方法,包括:
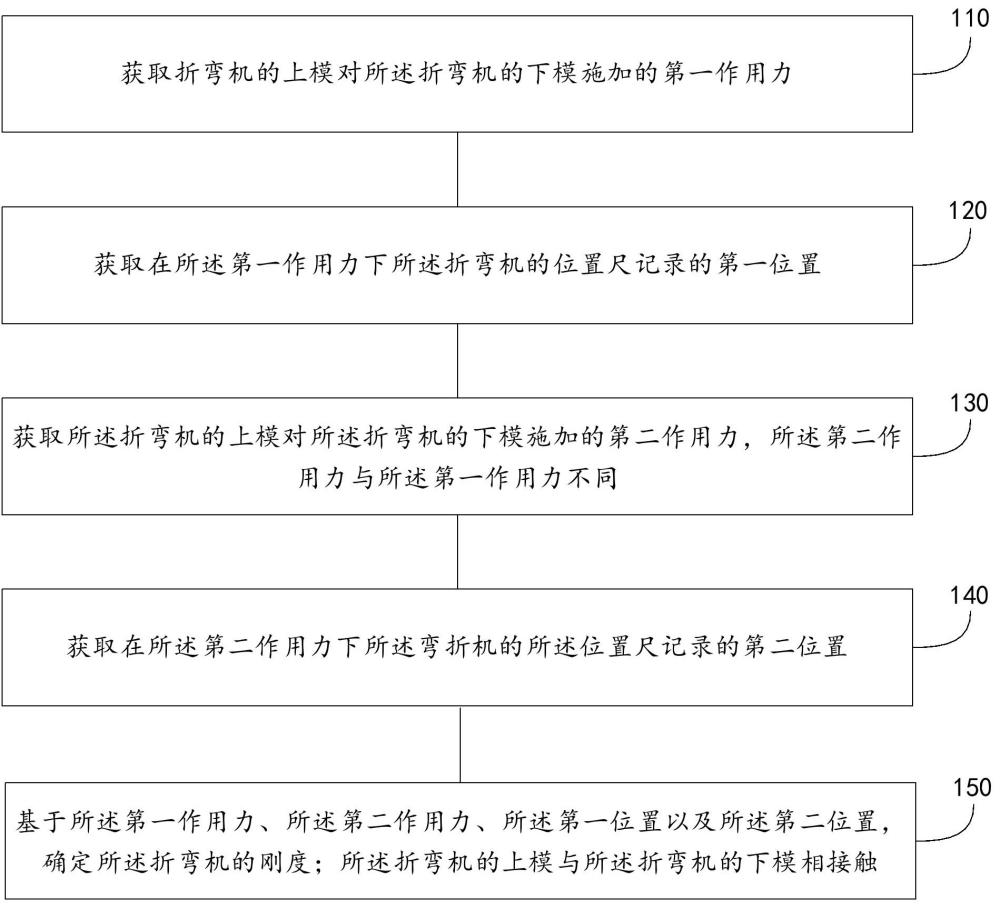
3、获取折弯机的上模对所述折弯机的下模施加的第一作用力;
4、获取在所述第一作用力下所述折弯机的位置尺记录的第一位置;
5、获取所述折弯机的上模对所述折弯机的下模施加的第二作用力,所述第二作用力与所述第一作用力不同;
6、获取在所述第二作用力下所述弯折机的所述位置尺记录的第二位置;
7、基于所述第一作用力、所述第二作用力、所述第一位置以及所述第二位置,确定所述折弯机的刚度;
8、其中,所述折弯机的上模与所述折弯机的下模相接触。
9、第二方面,本申请实施例提供了一种电子设备,该电子设备包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第一方面所述的方法的步骤。
10、第三方面,本申请实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储程序或指令,所述程序或指令被执行时实现如第一方面所述的方法的步骤。
11、第四方面,本申请实施例提供了一种计算机程序产品,该计算机程序产品包括计算机程序,该计算机程序在被处理器执行时实现如第一方面所述的方法的步骤。
12、本申请实施例提供的上述至少一个技术方案可以达到如下技术效果:
13、在本申请实施例中,获取折弯机的上模对所述折弯机的下模施加的第一作用力;获取在所述第一作用力下所述折弯机的位置尺记录的第一位置;获取所述折弯机的上模对所述折弯机的下模施加的第二作用力,所述第二作用力与所述第一作用力不同;获取在所述第二作用力下所述弯折机的所述位置尺记录的第二位置;基于所述第一作用力、所述第二作用力、所述第一位置以及所述第二位置,确定所述折弯机的刚度;其中,所述折弯机的上模与所述折弯机的下模相接触。如此,在测量刚度的过程中折弯机的上模与折弯机的下模相接触,通过上下模挤压的方式来测量刚度,而无需在上模和下模之间放置板材,即无需长板和短板的介入,能够解决通过对长板和短板分别折弯相同角度的折弯机刚度测量方式需要长板和短板的介入,导致刚度测量较为繁琐,测量效率较低的问题。而且,在测量过程中,通过位置尺记录位置,可以更便捷地获取位置信息,进一步确保刚度测量更为便捷,提高测量效率。
技术特征:
1.一种测量折弯机刚度的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述第二作用力是由所述折弯机的上模对所述折弯机的下模施加所述第一作用力的基础上继续下压产生。
3.根据权利要求1所述的方法,其特征在于,所述第一作用力和所述第二作用力均为实际施力。
4.根据权利要求3所述的方法,其特征在于,所述第一作用力基于所述折弯机的驱动器在第一时间点反馈的第一电动机输出扭矩得到,所述第二作用力基于所述折弯机的驱动器在第二时间点反馈的第二电动机输出扭矩得到,其中,所述第二时间点在所述第一时间点之后,所述第一电动机输出扭矩和所述第二电动机输出扭矩不同。
5.根据权利要求1-4任一项所述的方法,其特征在于,所述位置尺与所述弯折机的滑块固定连接,所述滑块与所述折弯机的所述上模固定连接,所述弯折机的驱动器通过电动机带动所述滑块和所述上模上下移动。
6.根据权利要求5所述的方法,其特征在于,所述第一位置和所述第二位置均为所述滑块的位置,所述第一位置与所述第二位置不同。
7.根据权利要求5所述的方法,其特征在于,在获取折弯机的上模对所述折弯机的下模施加的第一作用力之前,所述方法还包括:
8.根据权利要求1-4任一项所述的方法,其特征在于,所述基于所述第一作用力、所述第二作用力、所述第一位置以及所述第二位置,确定所述折弯机的刚度,包括:
9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求1-8任一项所述的方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述介质上存储程序或指令,所述程序或指令被执行时实现如权利要求1-8任一项所述的方法的步骤。
技术总结
一种测量折弯机刚度的方法、电子设备和计算机可读存储介质,属于折弯机领域。该方法包括:获取折弯机的上模对所述折弯机的下模施加的第一作用力;获取在所述第一作用力下所述折弯机的位置尺记录的第一位置;获取所述折弯机的上模对所述折弯机的下模施加的第二作用力,所述第二作用力与所述第一作用力不同;获取在所述第二作用力下所述弯折机的所述位置尺记录的第二位置;基于所述第一作用力、所述第二作用力、所述第一位置以及所述第二位置,确定所述折弯机的刚度;其中,所述折弯机的上模与所述折弯机的下模相接触。本申请用于测量弯折机刚度。
技术研发人员:曹灿
受保护的技术使用者:桥弘数控科技(上海)有限公司
技术研发日:
技术公布日:2025/4/10
- 还没有人留言评论。精彩留言会获得点赞!