一种联肢剪力墙连梁损伤智能检测装置
本发明涉及检测装置,具体的涉及一种联肢剪力墙连梁损伤智能检测装置。
背景技术:
1、众所周知,连梁是连接剪力墙两肢的梁,通常用于连接有洞口或断开的墙肢,以增强结构的整体性和稳定性,它们在风荷载和地震作用下承受较大的内力,是剪力墙结构中的重要受力构件,为便于联肢剪力墙连梁的检测,我们提出一种联肢剪力墙连梁损伤智能检测装置。
2、经检索,中国专利公告号为cn114965712a的专利和中国专利公告号为cn118032773a的专利分别公开了一种联肢剪力墙连梁损伤智能检测装置和一种基于桥梁结构健康检测的报警装置,其中一种联肢剪力墙连梁损伤智能检测装置,其大致描述为,包括框架,框架上侧左右两端均转动连接有长筒滚轮,两个长筒滚轮之间设有第一驱动机构,框架左右两侧均转动连接有与长筒滚轮平行的双向螺纹杆,两个双向螺纹杆之间设有第二驱动机构,双向螺纹杆外壁的两端均螺纹连接有第一移动座,第一移动座均与框架滑动连接,其在使用时,能够沿着联肢墙墙边稳定地爬行至连梁梁底的任意位置,且能够从连梁梁底稳定地爬行至联肢墙墙边的任意位置,并能够通过超声波自动检测机构对连梁进行损伤检测,而一种基于桥梁结构健康检测的报警装置,其大致描述为,包括安装架,安装架的一侧固定连接有限位板,限位板顶部滑动杆的底部外壁转动连接有转动架,转动架的一侧固定连接有测距仪,转动架的一侧检测板均开设有与测距仪射出的红外线配合使用的腰形孔,摄像头设置在转动架上,显示器内设有控制器和警报器,摄像头与显示器导线连接,控制器与测距仪导线连接,警报器与控制器导线连接,其在使用时,将装置架设在桥梁边侧,启动第二电机,第二电机带动齿轮转动,通过齿条带动滑动杆向下移动,同时第一电机带动蜗杆转动,蜗杆通过蜗轮带动套杆转动,套杆转动可以带动第一螺杆向下移动,带动第一滑动块向下移动,第一滑动块通过连杆带动转动架转动,使检测板接触桥梁底部,启动测距仪进行检测作业即可。
3、上述的现有技术方案虽然能够配套形成对应混凝土结构的辅助检测,但是使用过程中,需要借助诸如墙体或桥体辅助实现攀爬或挂载,使用局限性有待进一步降低,并且检测过程中对于诸如梁体结构的底部检测操作较为困难,单一的检测形式对于梁体的考评数据有限,检测项目有待进一步丰富。
技术实现思路
1、针对现有技术的不足,本发明提供了一种联肢剪力墙连梁损伤智能检测装置,其利用无人机飞行的形式达到相对于梁体的检测前的就位,检测准备工作对于墙体要求较小,更为实用,并且检测位置的局限性较低,检测项目更为丰富,检测数据更为完备。
2、为实现上述目的,本发明提供如下技术方案:一种联肢剪力墙连梁损伤智能检测装置,包括超声波自动检测机构,还包括飞行无人机,所述飞行无人机包括飞行机身,所述飞行机身内设置有轴装段,所述轴装段上转动连接有转动安装架,所述转动安装架内安装有伺服电机,所述伺服电机用于转动安装架相对于轴装段的转动调整和控制,转动安装架通过调节囊体组件安装有外置安装架,所述外置安装架上滑动连接有两个滑动安装架,两个所述滑动安装架上均转动连接有对位转动辊,外置安装架上安装有两个压力传感器,两个所述压力传感器分别与两个滑动安装架匹配,所述超声波自动检测机构安装在外置安装架的左侧,外置安装架内安装有光学检测组件,外置安装架上转动连接有摆动臂,所述摆动臂上连接有复位簧,所述复位簧与外置安装架连接,外置安装架内安装有电磁体,所述电磁体配套有永磁体,所述永磁体与所述摆动臂连接,摆动臂远离所述永磁体的一端安装有复合作业锤。
3、优选的,所述光学检测组件包括横跨杆,所述横跨杆固定连接在所述外置安装架内,横跨杆上固定连接有中心球,所述中心球上连接有球形套,中心球上固定连接有限位杆,所述球形套上开设有中弧口,所述限位杆插入所述中弧口内,球形套固定连接有挂载杆,所述挂载杆固定连接有配重架,所述配重架内安装有激光发射器和视觉摄像头。
4、优选的,所述调节囊体组件包括弹性囊和气泵,所述弹性囊的一端固定连接在所述转动安装架内,弹性囊的另一端与所述外置安装架固定连接,所述气泵安装在转动安装架内,气泵与弹性囊之间安装有输气控制管路。
5、优选的,所述转动安装架内固定连接有引导滑动筒,所述引导滑动筒内套装有引导棱形筒,所述引导棱形筒与所述外置安装架固定连接,引导滑动筒与引导棱形筒之间呈间隙配合。
6、优选的,所述复合作业锤包括筒锤壳,所述筒锤壳与所述摆动臂转动连接,筒锤壳上开设有多个侧面孔,多个所述侧面孔内均滑动连接有锤击座,筒锤壳内滑动连接有锥形筒,所述锥形筒用于多个所述锤击座的同步推出和收入联动,锥形筒内连接有伸缩筒,所述伸缩筒远离所述锥形筒的一端固定连接在筒锤壳内,伸缩筒连通有引气管,所述引气管与所述输气控制管路连通,且引气管上安装有电磁三通阀。
7、优选的,所述锥形筒内开设有多个侧斜条口,多个所述侧斜条口内均滑动连接有侧滑条,多个所述侧滑条分别与多个所述锤击座铰接,多个所述锤击座上均开设有螺纹槽,多个所述螺纹槽内均可拆卸螺纹连接有尖头钉。
8、优选的,所述摆动臂上固定连接有转连筒,所述筒锤壳上开设有与所述转连筒匹配的转连槽,转连筒内滑动连接有限位棱柱,所述限位棱柱设置有与筒锤壳匹配的限位齿面,限位棱柱固定连接有限位簧,所述限位簧固定连接有转动环,所述转动环转动连接有螺纹杆,所述螺纹杆与转连筒螺纹连接。
9、优选的,所述轴装段上连接有从动齿轮,所述从动齿轮啮合有驱动齿轮,所述驱动齿轮固定连接在所述伺服电机的输出轴上。
10、优选的,所述飞行机身上连接有两个固定翼,飞行机身上转动连接有两个转动翼,两个所述转动翼和两个飞行翼上均安装有变频电机,四个所述变频电机的输出轴上均安装有飞行翼,飞行机身上安装有两个控制电机,两个所述控制电机分别用于两个所述转动翼的转动控制和调整。
11、优选的,所述转动安装架的底端嵌入固定连接有永磁环,所述外置安装架上固定连接有铁环,所述铁环与所述永磁环匹配。
12、与现有技术相比,本发明提供了一种联肢剪力墙连梁损伤智能检测装置,具备以下有益效果:
13、(1)本发明中,通过飞行无人机的设计,形成该联肢剪力墙连梁损伤智能检测装置中检测功能部件的载体,利用无人机飞行的形式达到检测功能部件相对于与联肢剪力墙连梁的梁体的检测前的就位,检测准备工作对于被检测的梁体附近辅助墙体的特定环境要求较小,并且检测位置的局限性较低。
14、(2)本发明中,通过超声波自动检测机构的配备,形成与梁体对应的声波检测部件,方便利用声波对梁体的内部形成对应检测,通过光学检测组件的配备,方便对于梁体形成外部形状的对应标定和检测,检测项目更为丰富,检测数据更为完备。
15、(3)本发明中,通过摆动臂和复合作业锤的搭载,能够配合梁体形成表面锤击检测作业,一方面可以考评梁体的硬度情况,另一方面也可以对梁体表面的杂物进行去除,以降低梁体表面的外物对梁体本身的检测影响,更为实用。
技术特征:
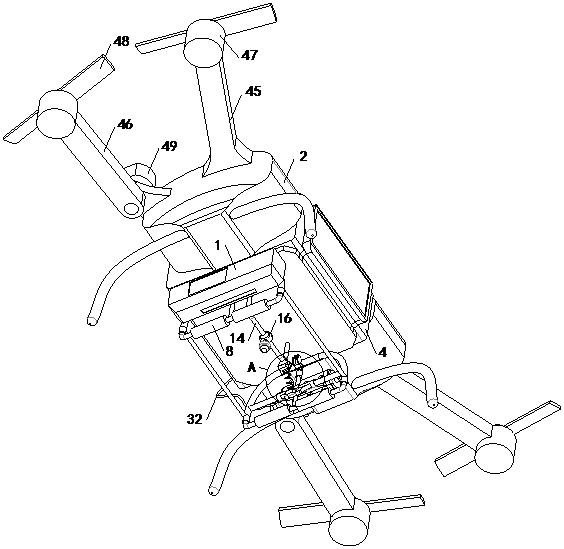
1.一种联肢剪力墙连梁损伤智能检测装置,包括超声波自动检测机构(1),其特征在于,还包括飞行无人机,所述飞行无人机包括飞行机身(2),所述飞行机身(2)内设置有轴装段(3),所述轴装段(3)上转动连接有转动安装架(4),所述转动安装架(4)内安装有伺服电机(5),所述伺服电机(5)用于转动安装架(4)相对于轴装段(3)的转动调整和控制,转动安装架(4)通过调节囊体组件安装有外置安装架(6),所述外置安装架(6)上滑动连接有两个滑动安装架(7),两个所述滑动安装架(7)上均转动连接有对位转动辊(8),外置安装架(6)上安装有两个压力传感器(9),两个所述压力传感器(9)分别与两个滑动安装架(7)匹配,所述超声波自动检测机构(1)安装在外置安装架(6)的左侧,外置安装架(6)内安装有光学检测组件,外置安装架(6)上转动连接有摆动臂(10),所述摆动臂(10)上连接有复位簧(11),所述复位簧(11)与外置安装架(6)连接,外置安装架(6)内安装有电磁体(12),所述电磁体(12)配套有永磁体(13),所述永磁体(13)与所述摆动臂(10)连接,摆动臂(10)远离所述永磁体(13)的一端安装有复合作业锤。
2.根据权利要求1所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述光学检测组件包括横跨杆(14),所述横跨杆(14)固定连接在所述外置安装架(6)内,横跨杆(14)上固定连接有中心球(15),所述中心球(15)上连接有球形套(16),中心球(15)上固定连接有限位杆(19),所述球形套(16)上开设有中弧口(20),所述限位杆(19)插入所述中弧口(20)内,球形套(16)固定连接有挂载杆(17),所述挂载杆(17)固定连接有配重架(18),所述配重架(18)内安装有激光发射器(21)和视觉摄像头(22)。
3.根据权利要求2所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述调节囊体组件包括弹性囊(23)和气泵(24),所述弹性囊(23)的一端固定连接在所述转动安装架(4)内,弹性囊(23)的另一端与所述外置安装架(6)固定连接,所述气泵(24)安装在转动安装架(4)内,气泵(24)与弹性囊(23)之间安装有输气控制管路(25)。
4.根据权利要求3所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述转动安装架(4)内固定连接有引导滑动筒(26),所述引导滑动筒(26)内套装有引导棱形筒(27),所述引导棱形筒(27)与所述外置安装架(6)固定连接,引导滑动筒(26)与引导棱形筒(27)之间呈间隙配合。
5.根据权利要求4所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述复合作业锤包括筒锤壳(28),所述筒锤壳(28)与所述摆动臂(10)转动连接,筒锤壳(28)上开设有多个侧面孔,多个所述侧面孔内均滑动连接有锤击座(30),筒锤壳(28)内滑动连接有锥形筒(29),所述锥形筒(29)用于多个所述锤击座(30)的同步推出和收入联动,锥形筒(29)内连接有伸缩筒(31),所述伸缩筒(31)远离所述锥形筒(29)的一端固定连接在筒锤壳(28)内,伸缩筒(31)连通有引气管(32),所述引气管(32)与所述输气控制管路(25)连通,且引气管(32)上安装有电磁三通阀(33)。
6.根据权利要求5所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述锥形筒(29)内开设有多个侧斜条口(34),多个所述侧斜条口(34)内均滑动连接有侧滑条(35),多个所述侧滑条(35)分别与多个所述锤击座(30)铰接,多个所述锤击座(30)上均开设有螺纹槽(36),多个所述螺纹槽(36)内均可拆卸螺纹连接有尖头钉(37)。
7.根据权利要求6所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述摆动臂(10)上固定连接有转连筒(38),所述筒锤壳(28)上开设有与所述转连筒(38)匹配的转连槽,转连筒(38)内滑动连接有限位棱柱(39),所述限位棱柱(39)设置有与筒锤壳(28)匹配的限位齿面,限位棱柱(39)固定连接有限位簧(40),所述限位簧(40)固定连接有转动环(41),所述转动环(41)转动连接有螺纹杆(42),所述螺纹杆(42)与转连筒(38)螺纹连接。
8.根据权利要求7所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述轴装段(3)上连接有从动齿轮(43),所述从动齿轮(43)啮合有驱动齿轮(44),所述驱动齿轮(44)固定连接在所述伺服电机(5)的输出轴上。
9.根据权利要求8所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述飞行机身(2)上连接有两个固定翼(45),飞行机身(2)上转动连接有两个转动翼(46),两个所述转动翼(46)和两个飞行翼(48)上均安装有变频电机(47),四个所述变频电机(47)的输出轴上均安装有飞行翼(48),飞行机身(2)上安装有两个控制电机(49),两个所述控制电机(49)分别用于两个所述转动翼(46)的转动控制和调整。
10.根据权利要求9所述的一种联肢剪力墙连梁损伤智能检测装置,其特征在于,所述转动安装架(4)的底端嵌入固定连接有永磁环(50),所述外置安装架(6)上固定连接有铁环(51),所述铁环(51)与所述永磁环(50)匹配。
技术总结
本发明涉及检测装置技术领域,提出了一种联肢剪力墙连梁损伤智能检测装置,其利用无人机飞行的形式达到相对于梁体的检测前的就位,检测准备工作对于墙体要求较小,更为实用,并且检测位置的局限性较低,检测项目更为丰富,包括超声波自动检测机构和飞行无人机,飞行无人机包括飞行机身,飞行机身内设置有轴装段,轴装段上转动连接有转动安装架,转动安装架内安装有伺服电机,伺服电机用于转动安装架相对于轴装段的转动调整和控制,转动安装架通过调节囊体组件安装有外置安装架,外置安装架上滑动连接有两个滑动安装架,两个滑动安装架上均转动连接有对位转动辊,外置安装架上安装有两个压力传感器,超声波自动检测机构安装在外置安装架上。
技术研发人员:李嘉,万华楠,尚进,孟德丽,杜艳云
受保护的技术使用者:山东中医药大学附属医院
技术研发日:
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!