船舶GPS天线位置调整方法、相关产品及应用与流程
本发明涉及船舶控制的,尤其是涉及一种船舶gps天线位置调整方法、相关产品及应用。
背景技术:
1、在水工工程建设中,具体在码头、海底沉管隧道等项目中,需要进行船舶整平、夯平及移船作业,在船舶整平、夯平及移船作业过程中,精确定位船舶是至关重要的环节。
2、现有技术中,普遍采用gps天线作为定位手段。然而,风向、河流流向等自然因素影响,船舶易发生横倾或纵倾现象,由此船舶的gps天线的实际基准点在gps坐标系中的位置发生改变,进而引发船舶定位的不准确,影响作业精度与效率。
技术实现思路
1、有鉴于此,本发明的目的在于提供船舶gps天线位置调整方法、相关产品及应用,以提升船舶定位的准确度、船舶作业精度和效率。
2、第一方面,本发明实施例提供了一种船舶gps天线位置调整方法,应用于终端,所述终端用于对目标船舶进行gps定位,所述目标船舶搭载有gps天线,所述gps天线在gps系统下的坐标为第一gps天线坐标,所述方法包括:
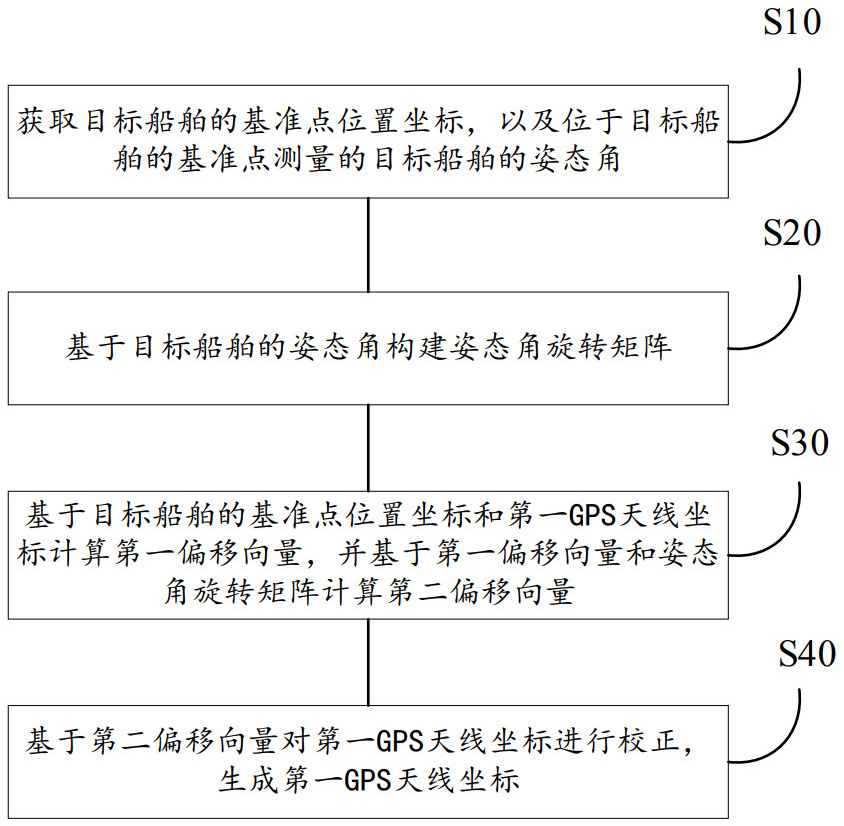
3、获取目标船舶的基准点位置坐标,以及位于目标船舶的基准点测量的目标船舶的姿态角;
4、基于所述目标船舶的姿态角构建姿态角旋转矩阵;
5、基于所述目标船舶的基准点位置坐标和所述第一gps天线坐标计算第一偏移向量,并基于所述第一偏移向量和所述姿态角旋转矩阵计算第二偏移向量;
6、基于所述第二偏移向量对所述第一gps天线坐标进行校正,生成第二gps天线坐标。
7、在本申请提供的实施例中,通过构建姿态角旋转矩阵将gps系统坐标系进行旋转,以对由于船舶横倾纵倾而导致的gps天线坐标的偏移量进行补偿,进而实现对gps位置坐标的调整和校正,减少了现有技术中由于船舶横倾而导致的gps位置坐标偏移,提升了船舶定位的准确度,提升了船舶后续作业精度和效率。
8、一种可能的方式是,所述姿态角包括:俯仰角、横摇角和艏艉偏角,所述基于所述目标船舶的姿态角构建姿态角旋转矩阵的步骤中,采用如下方式构建所述姿态角旋转矩阵:
9、;
10、—姿态角旋转矩阵
11、—艏艉偏角旋转矩阵;
12、—俯仰角旋转矩阵;
13、—横摇角旋转矩阵;
14、其中,;
15、—目标船舶的艏艉偏角;
16、;
17、—目标船舶的俯仰角;
18、 ;
19、—目标船舶的横摇角。
20、一种可能的方式是,所述基于所述目标船舶的基准点位置坐标和所述第一gps天线坐标计算第一偏移向量,并基于所述第一偏移向量和所述姿态角旋转矩阵计算第二偏移向量的步骤中,
21、所述第一偏移向量为所述目标船舶的基准点位置坐标和所述第一gps天线坐标之差。
22、一种可能的方式是,所述基准点位置坐标包括几何中心位置坐标和重心位置坐标的一种。
23、一种可能的方式是,所述基于所述目标船舶的基准点位置坐标和所述第一gps天线坐标计算第一偏移向量,并基于所述第一偏移向量和所述姿态角旋转矩阵计算第二偏移向量的步骤中,采用如下方式计算所述第二偏移向量:
24、;
25、—姿态角旋转矩阵;
26、 —第一偏移向量
27、—第二偏移向量在x轴的分量;
28、 —第二偏移向量在y轴的分量;
29、—第二偏移向量在z轴的分量;
30、—第二偏移向量。
31、一种可能的方式是,基于所述第二偏移向量对所述第一gps天线坐标进行校正,生成第二gps天线坐标的步骤中,采用如下基于所述第二偏移向量对所述第一gps天线坐标进行校正,生成第二gps天线坐标:
32、;
33、;
34、;
35、 —第二gps天线坐标的x轴坐标;
36、—第一gps天线坐标的x轴坐标;
37、—第二gps天线坐标的y轴坐标;
38、—第一gps天线坐标的y轴坐标;
39、—第二gps天线坐标的z轴坐标;
40、—第一gps天线坐标的z轴坐标。
41、第二方面,本申请实施例提供了一种船舶gps天线位置调整装置,应用于终端,所述终端用于对目标船舶进行gps定位,所述目标船舶搭载有gps天线,所述gps天线在gps系统下的坐标为第一gps天线坐标,包括:
42、获取模块:用于获取目标船舶的基准点位置坐标,以及位于目标船舶的基准点测量的目标船舶的姿态角;
43、构建模块:用于基于所述目标船舶的姿态角构建姿态角旋转矩阵;
44、计算模块:用于基于所述目标船舶的基准点位置坐标和所述第一gps天线坐标计算第一偏移向量,并基于所述第一偏移向量和所述姿态角旋转矩阵计算第二偏移向量;
45、校正模块:用于基于所述第二偏移向量对所述第一gps天线坐标进行校正,生成第二gps天线坐标。
46、第三方面,本申请实施例提供了一种电子设备,包括:至少一个处理器;以及
47、与所述处理器通信连接的至少一个存储器,其中:所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令能够执行如第一方面所述的方法。
48、第四方面,本申请实施例一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行第一方面所述的方法。
49、第五方面、本申请实施例提供了一种如第一方面所述的船舶gps天线位置调整方法的应用,应用于船舶整平作业和/或船舶夯平作业和/或船舶移动。
50、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
51、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种船舶gps天线位置调整方法,其特征在于,应用于终端,所述终端用于对目标船舶进行gps定位,所述目标船舶搭载有gps天线,所述gps天线在gps系统下的坐标为第一gps天线坐标,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述目标船舶的姿态角包括:目标船舶的俯仰角、横摇角和艏艉偏角,所述基于所述目标船舶的姿态角构建姿态角旋转矩阵的步骤中,采用如下方式构建所述姿态角旋转矩阵:
3.根据权利要求2所述的方法,其特征在于,所述基于所述目标船舶的基准点位置坐标和所述第一gps天线坐标计算第一偏移向量,并基于所述第一偏移向量和所述姿态角旋转矩阵计算第二偏移向量的步骤中,
4.根据权利要求3所述的方法,其特征在于,所述基准点位置坐标包括几何中心位置坐标和重心位置坐标的一种。
5.根据权利要求4所述的方法,其特征在于,所述基于所述目标船舶的基准点位置坐标和所述第一gps天线坐标计算第一偏移向量,并基于所述第一偏移向量和所述姿态角旋转矩阵计算第二偏移向量的步骤中,采用如下方式计算所述第二偏移向量:
6.根据权利要求5所述的方法,其特征在于,基于所述第二偏移向量对所述第一gps天线坐标进行校正,生成第二gps天线坐标的步骤中,采用如下基于所述第二偏移向量对所述第一gps天线坐标进行校正,生成第二gps天线坐标:
7.一种船舶gps天线位置调整装置,其特征在于,应用于终端,所述终端用于对目标船舶进行gps定位,所述目标船舶搭载有gps天线,所述gps天线在gps系统下的坐标为第一gps天线坐标,包括:
8.一种电子设备,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行如权利要求1至6任一所述的方法。
10.一种如权利要求1至6任一项所述的船舶gps天线位置调整方法的应用,其特征在于,所述方法应用于船舶整平作业和/或船舶夯平作业和/或船舶移动。
技术总结
本发明提供了一种船舶GPS天线位置调整方法、相关产品及应用,应用于终端,方法包括:获取目标船舶的基准点位置坐标,以及位于目标船舶的基准点测量的目标船舶的姿态角;基于目标船舶的姿态角构建姿态角旋转矩阵;基于目标船舶的基准点位置坐标和第一GPS天线坐标计算第一偏移向量,并基于第一偏移向量和姿态角旋转矩阵计算第二偏移向量;基于第二偏移向量对所述第一GPS天线坐标进行校正,生成第二GPS天线坐标。通过本申请通过对GPS系统坐标系下的GPS坐标偏移进行补偿,减少了现有技术中由于船舶横倾而导致的GPS位置坐标的改变,提升船舶定位的准确度、船舶作业精度和效率。
技术研发人员:金喜龙,顾华宇,尹志远,王传彬,张程程,赵维康,郎猛
受保护的技术使用者:天津海润海上技术股份有限公司
技术研发日:
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!