一种基于线激光三维扫描的基准坐标系标定方法与流程
本发明涉及线激光三维扫描,尤其涉及一种基于线激光三维扫描的基准坐标系标定方法。
背景技术:
1、随着中国工业制造的高速发展,线激光三维扫描测量仪因其非接触式、测量精度高、速度快的特点,正在成为现代生产线上的重要工具。线激光三维扫描仪是由一个相机和一个单线激光器组成,通过控制激光器投射一束激光线到被测物体上,然后相机拍摄变形后的激光线,提取激光线的中心点,就可以得到当前扫描位置下的被测物体三维点云数据,通过将扫描仪搭载在直线电机上,控制电机移动就可以完成获取完整的被测物体三维点云数据,根据获取到的三维点云数据,就可以实现被测物体的三维测量。
2、对于单线激光三维扫描仪,扫描仪的基准距离一般是由硬件结构确定的,但是由于实际安装误差的原因,基准距离往往并不等于设计值,因此需要通过标定才能获得更准确的基准距离。而且由于标定的光平面方程往往是在相机坐标系下,因此扫描的三维点云数据也会在相机坐标系下,而相机坐标系相对被测物体而言是倾斜的,所以相机坐标系下的三维点无法很好的判断当前被测物体是否位于扫描仪的最佳工作范围内,这会在一定程度上影响测量的精度。
技术实现思路
1、本发明的目的在于提供一种基于线激光三维扫描的基准坐标系标定方法,旨在解决现有的标定方法测量精度较低的问题。
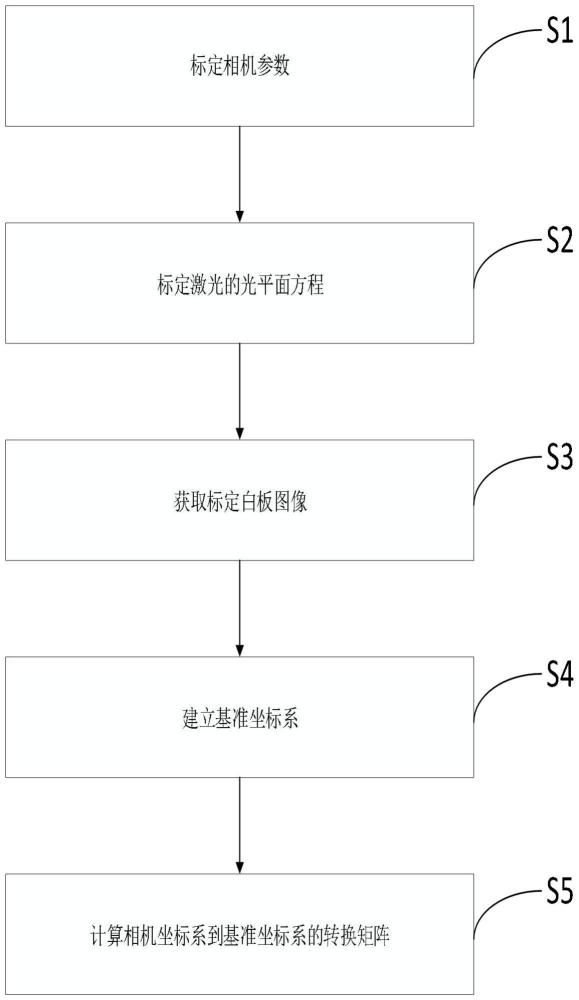
2、为实现上述目的,本发明提供了一种基于线激光三维扫描的基准坐标系标定方法,包括以下步骤:
3、标定相机参数;
4、标定激光的光平面方程;
5、获取标定白板图像;
6、建立基准坐标系;
7、计算相机坐标系到基准坐标系的转换矩阵。
8、其中,在“标定相机参数”中,包括以下步骤:
9、使用棋盘格标定板对相机进行标定;
10、控制相机拍摄多张不同位姿下的标定板图像;
11、提取标定板上的像素角点坐标,并根据标定板建立世界坐标系,得到每个角点在世界坐标系下的三维坐标;
12、将提取的角点像素坐标以及三维坐标带入相机标定函数中,得到相机的内外参数矩阵和畸变系数矩阵。
13、其中,在“标定激光的光平面方程”中,包括以下步骤:
14、控制相机拍摄两组不同位姿下的标定板图像及其对应的投射了激光线的标定板图像;
15、对没有激光线的标定板图像进行角点提取,对有激光线的标定板图像进行激光线提取,得到激光中心像素坐标;
16、通过相机内参矩阵以及当前标定板位姿对应的相机外参矩阵,计算激光中心像素坐标对应的三维坐标;
17、根据激光中心三维点拟合光平面方程。
18、其中,在“获取标定白板图像”中,包括以下步骤:
19、控制相机拍摄投射了激光线的白板图像;
20、基于白板图像提取激光中心像素坐标;
21、根据标定的相机内参矩阵和光平面方程获取激光中心三维坐标;
22、通过拟合激光中心直线方程得到基准坐标系的x轴。
23、其中,在“建立基准坐标系”中,包括以下步骤:
24、将光平面方程的法向量作为基准坐标系的y轴;
25、通过基准坐标系x轴和y轴方向向量叉乘得到基准坐标系的z轴;
26、确定基准坐标系的坐标轴方向。
27、其中,在“计算相机坐标系到基准坐标系的转换矩阵”中,包括以下步骤:
28、根据获取到的基准坐标系三个坐标轴在相机坐标系下的三维坐标,以及相机坐标系自身三个坐标轴的三维坐标,得到相机坐标系到基准坐标系的旋转矩阵;
29、基于基准坐标系的坐标原点在相机坐标系下的三维坐标,得到相机坐标系到基准坐标系的平移矩阵;
30、基于旋转矩阵和平移矩阵,将相机坐标系下的三维点云数据转换到基准坐标系上。
31、本发明的一种基于线激光三维扫描的基准坐标系标定方法,包括以下步骤:标定相机参数;标定激光的光平面方程;获取标定白板图像;建立基准坐标系;计算相机坐标系到基准坐标系的转换矩阵。本发明仅需在标定时额外获取一张白板图像,就可以确定线激光三维扫描仪的基准坐标系,通过将获取的被测物体三维点云数据转换到基准坐标系下,就可以根据点云数据的z坐标值来确定当前物体是否位于测量范围内,极大的提高后续点云处理和三维测量的效率和准确性。从而解决了现有的标定方法测量精度较低的问题。
技术特征:
1.一种基于线激光三维扫描的基准坐标系标定方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于线激光三维扫描的基准坐标系标定方法,其特征在于,在“标定相机参数”中,包括以下步骤:
3.如权利要求1所述的基于线激光三维扫描的基准坐标系标定方法,其特征在于,在“标定激光的光平面方程”中,包括以下步骤:
4.如权利要求1所述的基于线激光三维扫描的基准坐标系标定方法,其特征在于,在“获取标定白板图像”中,包括以下步骤:
5.如权利要求1所述的基于线激光三维扫描的基准坐标系标定方法,其特征在于,在“建立基准坐标系”中,包括以下步骤:
6.如权利要求1所述的基于线激光三维扫描的基准坐标系标定方法,其特征在于,在“计算相机坐标系到基准坐标系的转换矩阵”中,包括以下步骤:
技术总结
本发明涉及线激光三维扫描技术领域,具体涉及一种基于线激光三维扫描的基准坐标系标定方法,包括以下步骤:标定相机参数;标定激光的光平面方程;获取标定白板图像;建立基准坐标系;计算相机坐标系到基准坐标系的转换矩阵。本发明仅需在标定时额外获取一张白板图像,就可以确定线激光三维扫描仪的基准坐标系,通过将获取的被测物体三维点云数据转换到基准坐标系下,就可以根据点云数据的z坐标值来确定当前物体是否位于测量范围内,极大的提高后续点云处理和三维测量的效率和准确性。从而解决了现有的标定方法测量精度较低的问题。
技术研发人员:李佩伍,冯云,陶国仁,吴家能,伍荣誉,唐锋
受保护的技术使用者:桂林量具刃具有限责任公司
技术研发日:
技术公布日:2025/4/17
- 还没有人留言评论。精彩留言会获得点赞!