一种对比不同数字陀螺仪延时大小的方法与流程
本发明属于数字陀螺仪测量,具体涉及一种对比不同数字陀螺仪延时大小的方法。
背景技术:
1、数字陀螺仪是惯性测量系统中的关键元件,广泛应用于武器制导,航空航天、舰载设备姿态控制和导航等军用民用领域。在一些设备的控制系统中,数字陀螺仪用作速度反馈测量元件,其相位延迟对控制系统的性能,尤其是一些有一定动态响应要求的控制系统具有至关重要的影响。多数陀螺数据手册对相位延迟这一指标没有具体描述,导致无法选择延时尽量小的陀螺来提升控制系统的性能。
2、中国发明专利申请《一种陀螺相位响应的测量装置及方法》(cn101424543a)公开了一种陀螺相位响应的测量装置及方法,该装置包括待测陀螺,转台,电位计,数据采集与处理系统,电机驱动系统,数据采集系统与处理系统采用数字信号处理器进行实时采集陀螺与电位计的值,对采集到的电位计值求导,通过比较待测陀螺的波形与电位计导数波形时间上的差异,求出待测陀螺在 f频率处的相位延迟,该发明在工程实际中简单实用,能够有效的给出待测陀螺的相位信息,但需要额外搭建实验平台,成本较高。在许多应用场景中,通常会比较不同陀螺仪的延时大小,选择延时最小的陀螺仪来提升系统性能,在不具备外界试验平台条件时,迫切需要一种简便易行、能比较不同陀螺仪延时大小的测量方法。
技术实现思路
1、为了解决在许多应用场景中,通常会比较不同陀螺仪的延时大小,选择延时最小的陀螺仪来提升系统性能,在不具备外界试验平台条件时,迫切需要一种简便易行、能比较不同陀螺仪延时大小的测量方法这一技术问题,本发明提供一种对比不同数字陀螺仪延时大小的方法。
2、所述方法包括如下步骤:
3、s1、选取具备电流环且通过数字处理器实现控制的光电设备;
4、s2、将待测数字陀螺仪与光电设备的电机共轴放置,将待测数字陀螺仪与数字处理器连接;
5、s3、在数字处理器的扫频信号生成模块中,设置扫频信号的幅值、频率起始点和频率结束点,得到输入正弦信号;
6、s4、将生成的输入正弦信号输入到电流环给定,并驱动电机转动;
7、s5、通过数字信号处理器实时采集待测数字陀螺仪感应出的正弦响应速度,得到输出正弦信号;
8、s6、将输入正弦信号与输出正弦信号进行傅里叶变换,得到各个频率点的幅值比和相位差,整合为频率数组、幅值比数组和相位差数组并保存到.txt文件中;
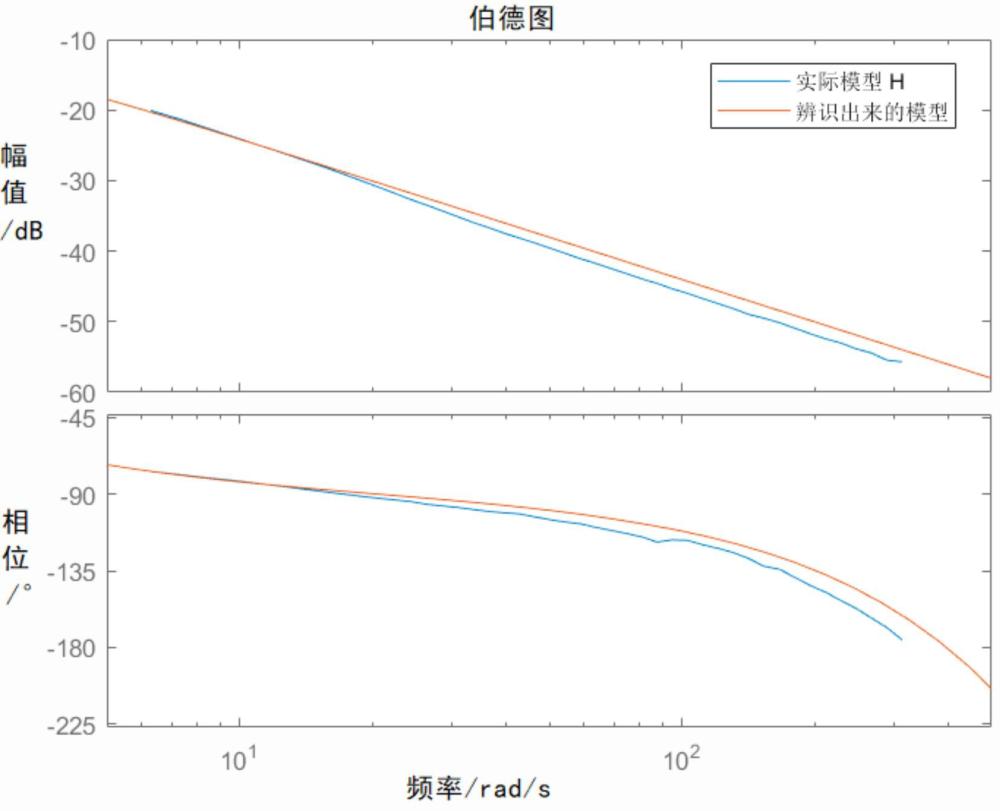
9、s7、绘制.txt文件的伯德图曲线h;
10、s8、将伯德图曲线h作为待辨识模型,辨识出伯德图曲线h对应的模型表示函数,并通过模型表示函数中的延时环节求解出待测数字陀螺仪的延时参数;
11、s9、对不同的待测数字陀螺仪进行s1-s8中的操作,求解出不同的待测数字陀螺仪对应的延时参数,延时参数越大则代表待测数字陀螺仪的延时越大。
12、进一步,将待测数字陀螺仪与光电设备的电机共轴放置时,待测数字陀螺仪敏感角速度的方向与电机及其轴系转轴方向平行,电机及轴系需要配平,保证惯量平衡。
13、进一步,绘制.txt文件的伯德图曲线h采用的方法具体为:在matlab软件中导入.txt文件,绘制出.txt文件的伯德图曲线h。
14、进一步,辨识出伯德图曲线h对应的模型表示函数具体为:在matlab软件中通过模型辨识工具箱进行参数辨识,辨识模板选为带有延时环节的一阶惯性环节。
15、进一步,所述辨识模板为,其中,表示转动惯量,表示一阶惯性环节,s表示复数变量,a 表示极点,表示延时环节,为延时参数,表示电流环给定到待测数字陀螺仪感应出的正弦响应速度输出的总延时时间。
16、本发明所述方法的有益效果为:
17、由于在许多应用场景中,通常会比较不同数字陀螺仪的延时大小,选择延时最小的数字陀螺仪来提升系统性能,但是目前的现有技术是通过搭建实验平台通过比较待数字测陀螺的波形与电位计导数波形时间上的差异,求出待测数字陀螺在 f频率处的相位延迟,求解出相位延迟后再挑选相位延迟最小的测数字陀螺进行应用,这种方式的成本消耗以及算力消耗都比较高。针对这一问题,本发明所述方法根据具体的应用需求,在对数字陀螺仪进行选择时并没有采用逐个求解相位延迟的方式,而是将逐个求解过程变为更加简便且高效的延时参数比较过程,这一方式的转变提升了对数字陀螺仪的选取效率;并且本发明所述方法不需要额外搭建实验平台,节省了资源。
技术特征:
1.一种对比不同数字陀螺仪延时大小的方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的对比不同数字陀螺仪延时大小的方法,其特征在于,将待测数字陀螺仪与光电设备的电机共轴放置时,待测数字陀螺仪敏感角速度的方向与电机及其轴系转轴方向平行,电机及轴系需要配平,保证惯量平衡。
3.根据权利要求2所述的对比不同数字陀螺仪延时大小的方法,其特征在于,绘制.txt文件的伯德图曲线h采用的方法具体为:在matlab软件中导入.txt文件,绘制出.txt文件的伯德图曲线h。
4.根据权利要求3所述的对比不同数字陀螺仪延时大小的方法,其特征在于,辨识出伯德图曲线h对应的模型表示函数具体为:在matlab软件中通过模型辨识工具箱进行参数辨识,辨识模板选为带有延时环节的一阶惯性环节。
5.根据权利要求4所述的对比不同数字陀螺仪延时大小的方法,其特征在于,所述辨识模板为,其中,表示转动惯量,表示一阶惯性环节,s表示复数变量,a 表示极点,表示延时环节,为延时参数。
技术总结
一种对比不同数字陀螺仪延时大小的方法。属于数字陀螺仪测量技术领域。其解决了在许多应用场景中,通常会比较不同陀螺仪的延时大小,选择延时最小的陀螺仪来提升系统性能,在不具备外界试验平台条件时,迫切需要一种简便易行、能比较不同陀螺仪延时大小的测量方法这一技术问题。本发明所述方法根据具体的应用需求,在对数字陀螺仪进行选择时并没有采用逐个求解相位延迟的方式,而是将逐个求解过程变为更加简便且高效的延时参数比较过程,这一方式的转变提升了对数字陀螺仪的选取效率;并且本发明所述方法不需要额外搭建实验平台,节省了资源。
技术研发人员:谢航,马天玮,田冰玲
受保护的技术使用者:长春通视光电技术股份有限公司
技术研发日:
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!