一种基于多普勒补偿的水下目标授时方法
本发明属于海洋工程领域,尤其涉及海洋大地时间基准。
背景技术:
1、在综合pnt体系(综合定位导航授时体系)里,水下pnt是综合pnt的重要组成部分。目前水下导航定位的技术与装备研究多种多样,然而授时只停留在理论层面。授时是未来重点发展的方向之一,是pnt服务的核心要素,通过授时,水下航行器才有统一的时间基准,并且保持长期的时间稳定。
2、现有算时间同步算法中如tshl算法,仅适用于静态网络。mu-sync算法,考虑节点移动性,但在节点快速移动或待同步节点响应时间过长时,都会造成较大的误差。de-sync算法利用多普勒估计传播延迟,并考虑节点频率偏差,精度较高。但要目标为径向匀速运动,实践中应用困难。
技术实现思路
1、本发明是为了为水下航行器提供统一的时间基准,并且保持长期的时间稳定,现提供一种基于多普勒补偿的水下目标授时方法。
2、一种基于多普勒补偿的水下目标授时方法,包括以下步骤:
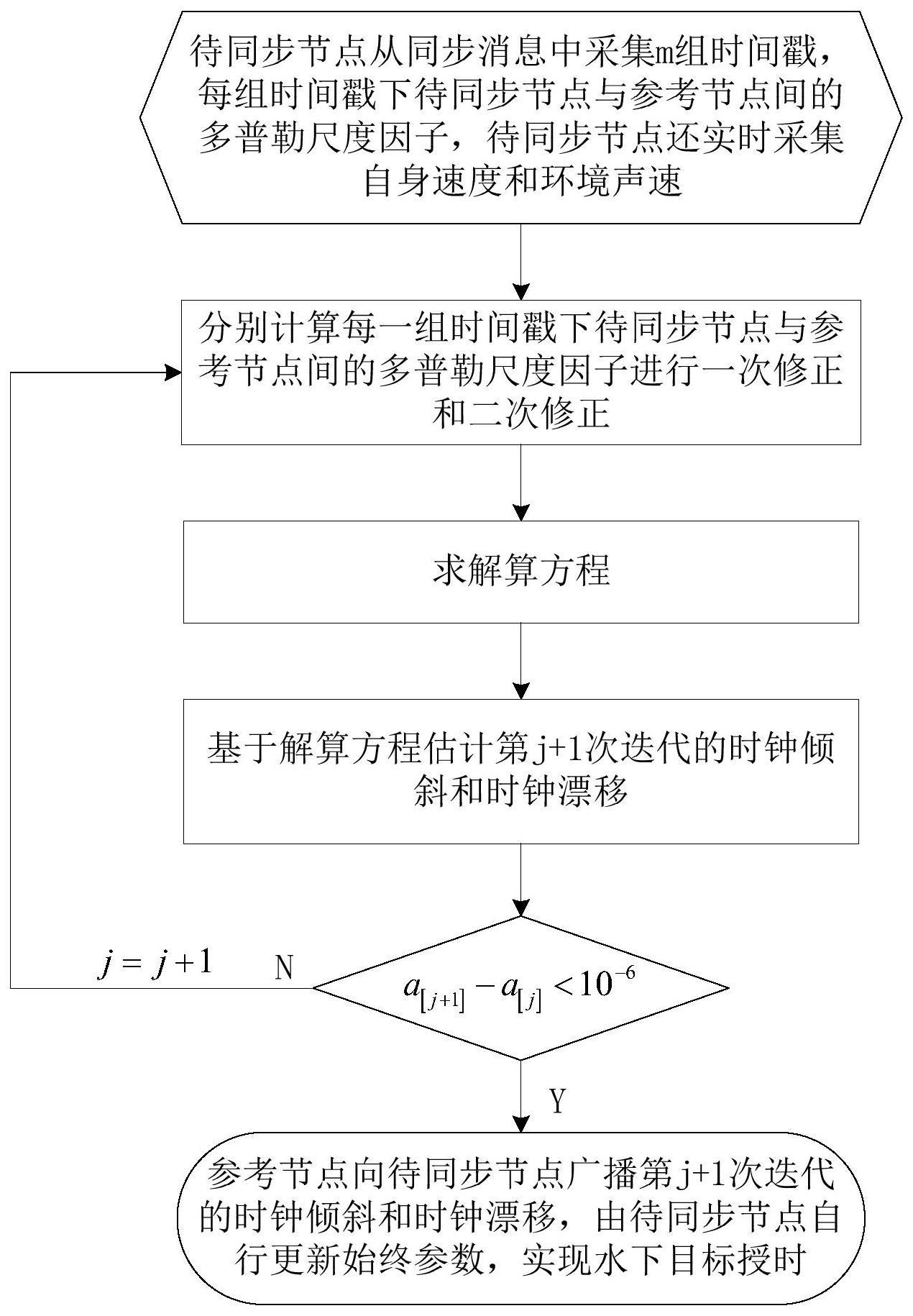
3、步骤一:待同步节点从同步消息中采集m组时间戳,以及每组时间戳下待同步节点与参考节点间的多普勒尺度因子,同时,待同步节点还实时采集自身速度v和环境声速c;
4、步骤二:根据下式分别计算每一组时间戳下待同步节点与参考节点间的多普勒尺度因子进行一次修正和二次修正:
5、
6、
7、其中,i=1,2,...,m,a[j]为待同步节点第j次迭代的时钟倾斜且a[1]=1,αab[i,j]为第j次迭代时第i组时间戳下参考节点至待同步节点的多普勒尺度因子,αba[i,j]为第j次迭代时第i组时间戳下待同步节点至参考节点的多普勒尺度因子,α′ab[i,j]和α′ba[i,j]分别为αab[i,j]和αba[i,j]的一次修正结果,α″ab[i,j]和α″ba[i,j]分别为αab[i,j]和αba[i,j]的二次修正结果,tab[i]为第i组时间戳下参考节点发射信号长度,tba[i]为第i组时间戳下待同步节点接收信号长度,中间变量t1[i]和t4[i]分别为第i组时间戳下参考节点发出和接收消息的本地时刻;
8、步骤三:根据下式分别求解每一组时间戳下参考节点向待同步节点发送消息的传播时延τ1[i]和待同步节点向参考节点发送消息的传播时延τ2[i]:
9、
10、其中,中间变量
11、v′和v″分别为待同步节点与参考节点单次交互信息时的起始瞬时速度和结束瞬时速度,t2[i]和t3[i]分别为第i组时间戳下待同步节点接收和发出消息的本地时刻;
12、步骤四:将步骤三的τ1[i]和τ2[i]代入下式:
13、
14、并将t1[i]和t4[i]相加获得解算方程:
15、t1[i](1+μ[i,j])+t4[i](1-μ[i,j])=a[j](t2[i]+t3[i])+2b[j],
16、其中,b[j]为待同步节点第j次迭代的时钟漂移;
17、步骤五:基于步骤四的解算方程估计第j+1次迭代的时钟倾斜a[j+1]和时钟漂移b[j+1]:
18、[a[j+1],b[j+1]]t=(hth)-1hty[j],
19、其中,y[j]为m组时间戳的解算方程矩阵,且表达式为:
20、
21、h为系数矩阵且表达式为
22、步骤六:判断下式是否成立,是则执行步骤七,否则使j=j+1,然后返回步骤二,
23、a[j+1]-a[j]<10-6;
24、步骤七:参考节点向待同步节点广播a[j+1]和b[j+1],由待同步节点自行更新始终参数,实现水下目标授时。
25、进一步的,待同步节点采集的第i组时间戳中包含的本地时刻为:
26、
27、其中,t1[i]和t4[i]分别为第i组时间戳下参考节点发出和接收消息的实际时刻,t2[i]和t3[i]分别为第i组时间戳下待同步节点接收和发出消息的实际时刻,和分别为时钟倾斜真值和时钟漂移真值。
28、进一步的,
29、进一步的,授时精度ηb为:
30、
31、其中,e(·)为期望函数,为时钟漂移真值,b为时钟漂移估计值。
32、进一步的,守时精度ηa为:
33、
34、其中,e(·)为期望函数,为时钟倾斜真值,a为时钟倾斜估计值。
35、本发明公开了一种基于多普勒补偿的水下运动目标授时方法。该方法包通过对目标运动状态的估计实现运动过程中多普勒测量值的修正,补偿因多普勒测量误差带来的时间同步误差,并给出基本的授时结果评估标准。本发明对任意状态目标,通过对其运动状态的估计完成多普勒测量值的补偿,实现任意状态目标的高精度授时。
技术特征:
1.一种基于多普勒补偿的水下目标授时方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于多普勒补偿的水下目标授时方法,其特征在于,待同步节点采集的第i组时间戳中包含的本地时刻为:
3.根据权利要求2所述的一种基于多普勒补偿的水下目标授时方法,其特征在于,
4.根据权利要求1、2或3所述的一种基于多普勒补偿的水下目标授时方法,其特征在于,授时精度ηb为:
5.根据权利要求1、2或3所述的一种基于多普勒补偿的水下目标授时方法,其特征在于,守时精度ηa为:
技术总结
一种基于多普勒补偿的水下目标授时方法,涉及海洋工程领域。本发明是为了为水下航行器提供统一的时间基准,并且保持长期的时间稳定。本发明所述的一种基于多普勒补偿的水下运动目标授时方法。该方法包通过对目标运动状态的估计实现运动过程中多普勒测量值的修正,补偿因多普勒测量误差带来的时间同步误差,并给出基本的授时结果评估标准。本发明对任意状态目标,通过对其运动状态的估计完成多普勒测量值的补偿,实现任意状态目标的高精度授时。
技术研发人员:孙大军,欧阳雨洁,韩云峰,张居成,郑翠娥,李海鹏,洪小平
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!