一种视觉SLAM系统的控制方法、装置、设备及存储介质
本申请涉及时间同步,尤其涉及一种视觉slam系统的控制方法、装置、设备及存储介质。
背景技术:
1、近年来,视觉slam(simultaneous localization and mapping,即时定位与地图构建)系统在自动驾驶领域中广泛应用,专家学者们发现仅利用单一的视觉传感器进行slam定位与建图,常常受到环境中各种因素的影响,得不到高鲁棒性、高实时性与高准确性的slam定位结果。针对这一困难,业界提出利用多传感器辅助slam的方法修正补偿利用纯视觉信息完成的视觉slam。最为经典的是视觉相机与惯性测量单元的数据融合。视觉相机能够提供高分辨率和丰富的环境信息,而惯性测量单元能够提供稳定和高频率的运动测量,两者互补,可以提高系统的鲁棒性以及定位的精准度。
2、现有技术通常连接互联网,与时间服务器进行通信来获取准确的时间信息,车辆上的客户端通过ntp(network time protocol,网络时间协议)发送时间请求给服务器,并接收服务器回复的时间戳信息,以此来校准自身的系统时间。然而,ntp通常存在网络延迟、网络拥塞和依赖外部服务器等缺陷,不能很好地满足实时性较高的多传感器视觉slam系统的要求。
技术实现思路
1、本申请的主要目的在于提供一种视觉slam系统的控制方法、装置、设备及存储介质,可以实现多个传感器高精度的时间同步,以便基于这些传感器和准确地定位建图,从而为视觉slam系统中多个传感器的数据融合提供了优势。
2、第一方面,本申请提供一种视觉slam系统的控制方法,应用于视觉slam系统,所述视觉slam系统包括多个传感器,控制方法包括:
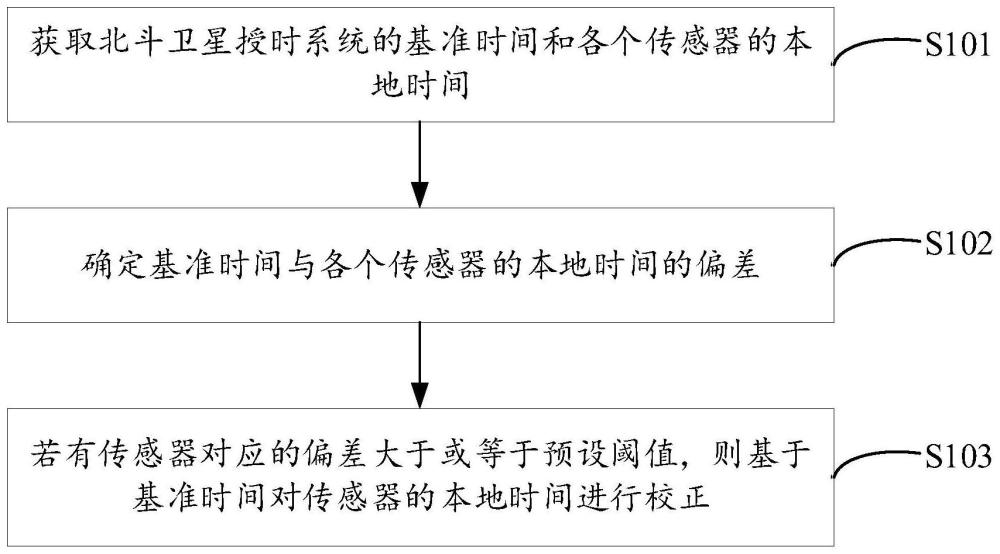
3、获取北斗卫星授时系统的基准时间和各个所述传感器的本地时间;
4、确定所述基准时间与各个所述传感器的本地时间的偏差;
5、若有所述传感器对应的所述偏差大于或等于预设阈值,则基于所述基准时间对所述传感器的本地时间进行校正。
6、第二方面,本申请还提供一种视觉slam系统的控制装置,应用于视觉slam系统,所述视觉slam系统包括多个传感器,控制装置包括:
7、获取模块,用于获取北斗卫星授时系统的基准时间和各个所述传感器的本地时间;
8、确定模块,用于确定所述基准时间与各个所述传感器的本地时间的偏差;
9、校正模块,用于若有所述传感器对应的所述偏差大于或等于预设阈值,则基于所述基准时间对所述传感器的本地时间进行校正。
10、第三方面,本申请还提供一种计算机设备,计算机设备包括存储器和处理器;
11、存储器,用于存储计算机程序;
12、处理器,用于执行计算机程序并在执行计算机程序时实现如上述的视觉slam系统的控制方法。
13、第四方面,本申请还提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时,实现如上述的视觉slam系统的控制方法的步骤。
14、本申请提供一种视觉slam系统的控制方法、装置、设备及存储介质,其中方法包括:获取北斗卫星授时系统的基准时间和各个所述传感器的本地时间;确定所述基准时间与各个所述传感器的本地时间的偏差;若有所述传感器对应的所述偏差大于或等于预设阈值,则基于所述基准时间对所述传感器的本地时间进行校正。本申请通过北斗卫星授时系统的基准时间校正视觉slam系统中多个传感器各自的本地时间,可以实现多个传感器高精度的时间同步,以便基于这些传感器准确地定位建图,从而为视觉slam系统中多个传感器的数据融合提供了优势。
技术特征:
1.一种视觉slam系统的控制方法,应用于视觉slam系统,其特征在于,所述视觉slam系统包括多个传感器,控制方法包括:
2.根据权利要求1所述的视觉slam系统的控制方法,其特征在于,在所述若有所述传感器对应的所述偏差大于或等于预设阈值,则基于所述基准时间对所述传感器的本地时间进行校正之后,包括:
3.根据权利要求2所述的视觉slam系统的控制方法,其特征在于,还包括:
4.根据权利要求1所述的视觉slam系统的控制方法,其特征在于,所述获取北斗卫星授时系统的基准时间和各个所述传感器的本地时间,包括:
5.根据权利要求4所述的视觉slam系统的控制方法,其特征在于,还包括:
6.根据权利要求5所述的视觉slam系统的控制方法,其特征在于,所述根据连续获取所述基准时间和各个所述传感器的本地时间的次数,以及每次获取的所述基准时间和各个所述传感器的本地时间的偏差,调整所述预设时间,包括:
7.根据权利要求1-6任意一项所述的视觉slam系统的控制方法,其特征在于,所述获取北斗卫星授时系统的基准时间,包括:
8.一种视觉slam系统的控制装置,应用于视觉slam系统,其特征在于,所述视觉slam系统包括多个传感器,装置包括:
9.一种计算机设备,其特征在于,计算机设备包括存储器和处理器;
10.一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,其特征在于,计算机程序被处理器执行时,实现如权利要求1至7中任意一项所述的视觉slam系统的控制方法的步骤。
技术总结
本申请涉及时间同步技术领域,提供一种视觉SLAM系统的控制方法、装置、设备及存储介质,其中方法包括:获取北斗卫星授时系统的基准时间和各个所述传感器的本地时间;确定所述基准时间与各个所述传感器的本地时间的偏差;若有所述传感器对应的所述偏差大于或等于预设阈值,则基于所述基准时间对所述传感器的本地时间进行校正。本申请通过北斗卫星授时系统的基准时间校正视觉SLAM系统中多个传感器各自的本地时间,可以实现多个传感器高精度的时间同步,以便基于这些传感器准确地定位建图,从而为视觉SLAM系统中多个传感器的数据融合提供了优势。
技术研发人员:黄章绅,贺知明,刘雨轩,苏小松,王致惠
受保护的技术使用者:电子科技大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!