力控装备输出力标定装置的制作方法
1.本实用新型涉及力控装备领域,具体涉及一种力控装备输出力标定装置。
背景技术:
2.力控装备主要由位移传感器、角度传感器、控制元器件及结构件组成,通过控制元器件控制力控装备输出力,为了能对力控装备输出力进行测量标定,需要在力控装备的力输出端外接力传感器,由力传感器来采集和反馈力控装备的输出力。在进行力控装备输出力的测量标定过程中,需要对位移、角度和输入电压等变量进行控制,并记录由力传感器检测到的对应变量下的力控装备输出力,以实现对力控装备输出力的测量标定过程。而在这个测量标定过程中,力传感器的标定装置起着至关重要的作用,直接决定了力控装备输出力测量标定结果的准确性。
3.在对力控装备输出力测量标定的过程中,为了尽可能模拟力控装备使用时的实际工况,要求力控装备在标定装置上有以下几种工作状态:1、静态;2、动态(沿力输出方向有加速度);3、沿周向旋转特定角度,而目前已有的标定装置只能满足一种或两种工作状态的标定需求,不能满足力控装备全部工作状态下的标定需求。
技术实现要素:
4.为了解决上述技术问题,本实用新型提供一种力控装备输出力标定装置,能够适用于在静态、动态及周向角度旋转三个工作状态下进行标定。
5.技术方案如下:
6.一种力控装备输出力标定装置,包括底座、测量机构、水平驱动机构和滑动端安装座;
7.所述底座包括垂直固定设置的板i和板ii,所述水平驱动机构固定设置在板i上,板ii用于固定待测力控装备或测量机构;
8.所述水平驱动机构包括伺服电机和单轴驱动器;所述伺服电机与所述单轴驱动器的丝杠连接,伺服电机转动带动单轴驱动器的丝杠转动,继而令单轴驱动器的滑块沿着丝杠的轴向运动;
9.所述滑动端安装座与所述单轴驱动器的滑块连接,与其同步运动;
10.所述滑动端安装座设有与所述底座的板ii相对的板iii,板iii用于固定测量机构或待测力控装备;所述待测力控装备的力输出端与所述测量机构相连接,用于实时检测力输出端的输出力。
11.进一步的,所述测量机构包括依次设置的力传感器和浮动接头;所述浮动接头能与待测力控装备的力输出端连接;所述力传感器固定设置在板ii或板iii上。
12.进一步的,所述单轴驱动器的轴向设有两个限位块,用于限制滑动端安装座往复运动的行程。
13.进一步的,所述两个限位块的相对面分别设有弹性橡胶垫。
14.进一步的,所述板ii、板iii侧面均设置有加强筋,用于保证其刚性、垂直度。
15.进一步的,滑动端安装座上沿水平驱动机构运动方向设有多个固定位,所述板iii依据适配待测力控装备的长度安装在不同固定位上。
16.进一步的,所述板ii、板iii上分别设置有多个安装孔,用以调整待测力控装备沿周向旋转的角度。
17.本实用新型设计了一种力控装备输出力标定装置,本装置通过控制伺服电机启/停实现对待测力控装备在动态/静态工作状态下的输出力标定,同时,板ii、板iii上安装孔的设计可以实现对待测力控装备进行周向角度旋转,满足待测力控装备在实际工况下的全部标定需求;另外,标定装置的测量机构和水平驱动机构均固定在底座上,使整个装置具有良好的刚性,保证了标定的准确性,且便于移动。
附图说明
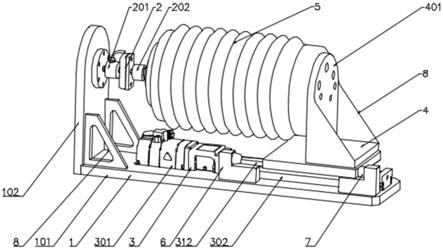
18.图1为实施例中力控装备输出力标定装置立体结构示意图;
19.图2为实施例中水平驱动机构结构示意图;
20.图3为实施例中力控装备输出力标定装置示意图;
21.图4为实施例中调换测量机构及待测力控装备位置的标定装置示意图。
具体实施方式
22.以下结合附图和实施例对本实用新型的技术方案进行详细描述。
23.实施例1
24.如图1所示,一种力控装备输出力标定装置,包括底座1、测量机构2、水平驱动机构3和滑动端安装座4;底座包括垂直固定设置的板i 101和板ii 102,水平驱动机构固定设置在板i 101上,测量机构固定设置与板ii 102上,板i 101和板ii 102连接处设有加强筋8,用以保证装置的刚性及垂直度,从而保证测量机构受力方向上轴线处于水平位置。
25.如图2所示,水平驱动装置3包括伺服电机301、联轴器303和单轴驱动器302;单轴驱动器302固定安装在板i 101上,伺服电机301固定安装在单轴驱动器302左侧,且伺服电机301的输出轴通过联轴器303与单轴驱动器302的丝杠312连接,实现伺服电机301带动单轴驱动器302的丝杠312同步转动,继而令单轴驱动器302的滑块322沿着丝杠312的轴向运动。因此,通过控制伺服电机301的转速及方向,即可控制滑块322的运动速度及方向(前进、后退或往复)。
26.单轴驱动器302轴向两端设有两个限位块6,用于限制滑动安装座4沿丝杠312轴向往复运动的行程;限位块6正对滑动端安装座4一面设有弹性橡胶垫7,为滑动端安装座位移极限位置提供保护,从而避免待测力控装备在两个行程极限位置因硬性撞击而受到损伤。
27.滑动端安装座4与单轴驱动器302的滑块322通过螺钉连接,并与其沿丝杠312的轴向同步运动;滑动端安装座4上设有与底座的板ii 102相对的板iii401,板iii 401上对应待测力控装备的安装接口处,设有相应个数的安装孔,用于安装待测力控装备,多个安装孔之间具有互换性,在进行力控装置输出力标定的过程中,可将待测力控装备沿周向旋转特定角度后固定,以实现力控装备在旋转角度的工况下进行标定。
28.本实施例板iii 401上安装孔的位置对应于111
‑
04及111
‑
05两款力控装备的安装
接口设置,可兼容这两款规格的力控装备进行标定,且滑动端安装座4上沿水平驱动机构3运动方向设有多个板ⅲ401安装位,板ⅲ401可依据适配待测力控装备5的长度安装在相应的安装位上。另外,板iii 12的侧面与滑动安装座连接处还设有加强筋8,用以保证装置的刚性及垂直度。
29.测量机构2包括力传感器201、浮动接头202和法兰。浮动接头202设置在力传感器201的右侧,二者通过法兰固定连接;力传感器201左侧接有法兰,板ii 102上与法兰连接孔对应处设有安装孔,通过螺钉与销钉可实现法兰与板ii 102的固定连接,从而将测量机构固定连接在板ii 102上。本实施例中浮动接头202选用smc jaf30
‑
10
‑
125型号,该浮动接头自身结构具有安装法兰,不需外加法兰进行安装,便于与力传感器201连接;所述浮动接头202右侧与待测力控装备的力输出端连接,用于实时检测力输出端的输出力。
30.本实施例在进行静态标定时,伺服电机301抱闸,停止运动,单轴驱动器的滑块322连同滑动端安装座4不发生位移,待测力控装备的非力输出端静止,测量机构对待测力控装备的输出力进行标定;在进行动态标定时,伺服电机301启动,带动单轴驱动器的滑块322连同滑动端安装座4沿轴向运动,待测力控装备的非力输出端随滑动端安装座4同步运动,测量机构对待测力控装备的输出力进行标定;在进行沿周向旋转角度标定时,将安装在板iii 401上的待测力控装备取下,沿周向旋转到特定角度后再固定到板iii 401上进行标定。
31.实施例2
32.如图4所示,一种力控装备输出力标定装置,包括底座1、测量机构2、水平驱动机构3和滑动端安装座4;底座1包括垂直固定设置的板i 101和板ii 102,水平驱动机构固定设置在板i 101上,待测力控装置固定设置与板ii 102上,板i 101和板ii 102连接处设有加强筋8,用以保证装置的刚性及垂直度。
33.水平驱动装置3包括伺服电机301、联轴器303和单轴驱动器302;单轴驱动器302固定安装在板i 101上,伺服电机301固定安装在单轴驱动器302左侧,且伺服电机301的输出轴通过联轴器303与单轴驱动器302的丝杠312连接,实现伺服电机301带动单轴驱动器302的丝杠312同步转动,继而令单轴驱动器302的滑块322沿着丝杠312的轴向运动。因此,通过控制伺服电机301的转速及方向,即可控制滑块322的运动速度及方向(前进、后退或往复)。
34.单轴驱动器302轴向两端设有两个限位块6,用于限制滑动安装座4沿丝杠312轴向往复运动的行程;限位块6正对滑动端安装座4一面设有弹性橡胶垫7,为滑动端安装座位移极限位置提供保护,从而避免待测力控装备在两个行程极限位置因硬性撞击而受到损伤。
35.滑动端安装座4与单轴驱动器302的滑块322通过螺钉连接,并与其沿丝杠312的轴向同步运动;滑动端安装座4上设有与底座的板ii102相对的板iii401,板iii401用于固定连接测量结构,同时,滑动端安装座4上沿水平驱动机构3运动方向设有多个板ⅲ401安装位,板ⅲ401可依据适配待测力控装备5的长度安装在相应的安装位上。
36.测量机构2包括力传感器201、浮动接头202和法兰。浮动接头202设置在力传感器201的左侧,二者通过法兰固定连接;力传感器201右侧接有法兰,板iii 401上与法兰连接孔对应处设有安装孔,通过螺钉与销钉可实现法兰与板iii401的固定连接,从而将测量机构固定连接在板iii 401上。同时,板iii 401的侧面与滑动安装座连接处还设有加强筋8,用以保证装置的刚性及垂直度,从而保证测量机构受力方向上的轴线处于水平位置。本实施例中浮动接头202选用smc jaf30
‑
10
‑
125型号,该浮动接头自身结构具有安装法兰,不需
外加法兰进行安装,便于与力传感器201连接;所述浮动接头202左侧与待测力控装备的力输出端连接,用于实时检测力输出端的输出力。
37.本实施例板ii102上安装孔的位置对应于111
‑
04及111
‑
05两款力控装备的安装接口设置,可兼容这两款规格的力控装备进行标定,在进行力控装置输出力标定的过程中,可将待测力控装备沿周向旋转特定角度后固定,以实现力控装备在旋转角度的工况下进行标定。
38.本实施例在进行静态标定时,伺服电机301抱闸,停止运动,单轴驱动器的滑块322连同滑动端安装座4不发生位移,测量机构静止,对待测力控装备的输出力进行标定;在进行动态标定时,伺服电机301启动,带动单轴驱动器的滑块322连同滑动端安装座4沿轴向运动,测量机构随滑动端安装座4同步运动,对待测力控装备的输出力进行标定;在进行沿周向旋转角度标定时,将安装在板ii 102上的待测力控装备取下,沿周向旋转到特定角度后再固定到板ii 102上进行标定。
39.前面对本实用新型具体示例性实施方案所呈现的描述是出于说明和描述的目的。前面的描述并不想要成为毫无遗漏的,也不是想要把本实用新型限制为所公开的精确形式,显然,根据上述教导很多改变和变化都是可能的。选择示例性实施方案并进行描述是为了解释本实用新型的特定原理及其实际应用,从而使得本领域的其它技术人员能够实现并利用本实用新型的各种示例性实施方案及其不同选择形式和修改形式。本实用新型的范围旨在由所附权利要求书及其等价形式所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1