用于操控车辆的安全停止模式的方法和控制单元与流程
本发明总体上涉及一种方法、控制单元和车辆。更具体地,本发明涉及操控车辆的安全停止模式。本发明可以应用于重型车辆,诸如卡车、公共汽车和建筑设备,并且这些重型车辆适于以自主模式运行。虽然本发明将针对卡车进行描述,但是本发明不限于该特定车辆,而是也可以用于其它车辆,诸如公共汽车、建筑设备、卡车、工作机器、小汽车。本发明可以用于工业建筑机械或建筑设备领域内的任何类型的工作机,例如轮式装载机、铰接式运输车、自卸卡车、挖掘机和反铲装载机等。
背景技术:
1、如今,许多车辆都可以使用自主模式。当车辆处于自主模式时,它可以被称为自主车辆或自行驾驶车辆。当车辆处于自主模式时,它可以例如自行加速、制动和转向。此外,在自主模式下,车辆可以感测其环境并且可以在没有人为输入或外部控制的情况下安全地导航。
2、车辆中的自主模式存在几个等级,其在从非自动、经过部分自主和直到完全自主的范围中。例如,当车辆处于自主模式时,车辆操作的一些或所有的驾驶形态可以由车辆控制系统操控。在这样的情况下,被包括在车辆上和服务器网络中的计算设备可以是可运行的以执行诸如以下功能:规划驾驶路线,感测车辆的形态,感测车辆的环境,以及控制驾驶功能,诸如转向、加速和制动。因此,处于自主模式的车辆可以减少或消除在车辆操作的各个方面中对人类交互的需要。完全自主车辆能够在没有用户监督和任何外部控制的情况下执行所有驾驶功能。
3、当用户想要在车辆中启动自主模式时,起动程序通常由用户从车辆驾驶室内发起。车辆的自主部分需要通电,计算机和传感器需要被启用,必须执行一些自我诊断,并且必须与外部控制系统(例如现场控制系统)建立通信。由于用户当时需要离开车辆,因此以安全的方式离开车辆非常重要。有必要保证自主车辆将不会开始无意地执行任务并开走从而给用户造成危险情况。当人类为了例如取车或操控非计划停止而需要接近处于自主模式的车辆时,也会出现同样的需求。
4、因此,需要至少减轻或解决上述问题。
技术实现思路
1、本发明的目的是为适于以自主模式运行的车辆提供改进的安全性。
2、该目的通过根据权利要求1所述的方法来实现。
3、根据第一方面,该目的通过一种由控制单元执行的用于操控车辆的安全停止模式的方法来实现。控制单元获得用于启用安全停止模式的启用请求。当安全停止模式被启用时,车辆不能执行自主驾驶。当已经获得启用请求时,控制单元验证是否满足车辆的所有安全条件。被满足的安全条件指示车辆不能移动。当已经获得启用请求并且满足所有安全条件时,控制单元启用安全停止模式。当满足所有安全条件时,控制单元触发至少一个光源被点亮。在安全停止模式已经被启用之后,控制单元获得用于禁用车辆的安全停止模式的禁用请求。控制单元禁用车辆的安全停止模式。当安全停止模式被禁用时,车辆能够执行自主驾驶。
4、本公开内容提供了许多优点,这些优点的非穷尽列表如下:
5、由于当满足所有安全条件时安全停止模式被启用,因此可以确保车辆不能执行自主驾驶。这些安全条件可以是应用了驻车制动器、齿轮箱处于空档等,这些安全条件是在被满足时会阻止车辆执行自主驾驶的条件。当基于例如车辆内的用户启用内部输入设备来启用安全停止模式时,车辆被认为是安全的,这是因为它不能移动。因此,用户可以安全地走出车辆,知道车辆将不会执行自主驾驶,例如,当他离开车辆时,车辆将不会移动。
6、在触发光源的情况下,用户和车辆周围的任何其它人将明白安全停止模式已启用并且离开和接近车辆是安全的,而不会出现车辆执行无意的自主驾驶的任何风险。换言之,所述光源指示车辆将不会无意地执行任务并开走从而给用户造成危险情况。
7、由于存在例如通过启用外部输入设备来禁用安全停止模式并且由此启用自主驾驶的可能性,这就确保了在用户走出车辆之前不能重新启用自主驾驶。因此,改进了安全性。
8、根据第二方面,通过被配置用以执行根据第一方面的方法的控制单元来实现所述目的。第二方面的效果和特征在很大程度上类似于上面结合第一方面描述的那些效果和特征。
9、本发明的进一步优点和有利特征在下面的描述和从属权利要求中公开。
技术特征:
1.一种由控制单元(10)执行的用于操控车辆(1)的安全停止模式的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其中,禁用(307)所述安全停止模式包括:
3.根据前述权利要求中的任一项所述的方法,其中,启用(303)所述安全停止模式包括:
4.根据前述权利要求中的任一项所述的方法,其中,用于启用所述安全停止模式的所述启用请求从以下项中的至少一项获得:
5.根据前述权利要求中的任一项所述的方法,其中所述禁用请求从以下项中的至少一项获得:
6.根据前述权利要求中的任一项所述的方法,其中,当出现以下项中的至少一项时,满足所有安全条件:
7.根据前述权利要求中的任一项所述的方法,包括:
8.根据前述权利要求中的任一项所述的方法,包括:
9.根据前述权利要求中的任一项所述的方法,其中,所述控制单元(10)与所述车辆(1)的自主驾驶系统(20)分开并且并行运行。
10.一种计算机程序,包括程序代码装置,当所述程序在计算机上运行时,所述程序代码装置用于执行权利要求1-9中的任一项所述的步骤。
11.一种计算机可读介质,所述计算机可读介质携载计算机程序,所述计算机程序包括程序代码装置,当所述程序产品在计算机上运行时,所述程序代码装置用于执行权利要求1-9中的任一项所述的步骤。
12.一种控制单元(10),所述控制单元(10)被配置用以执行根据权利要求1-9中的任一项所述的方法。
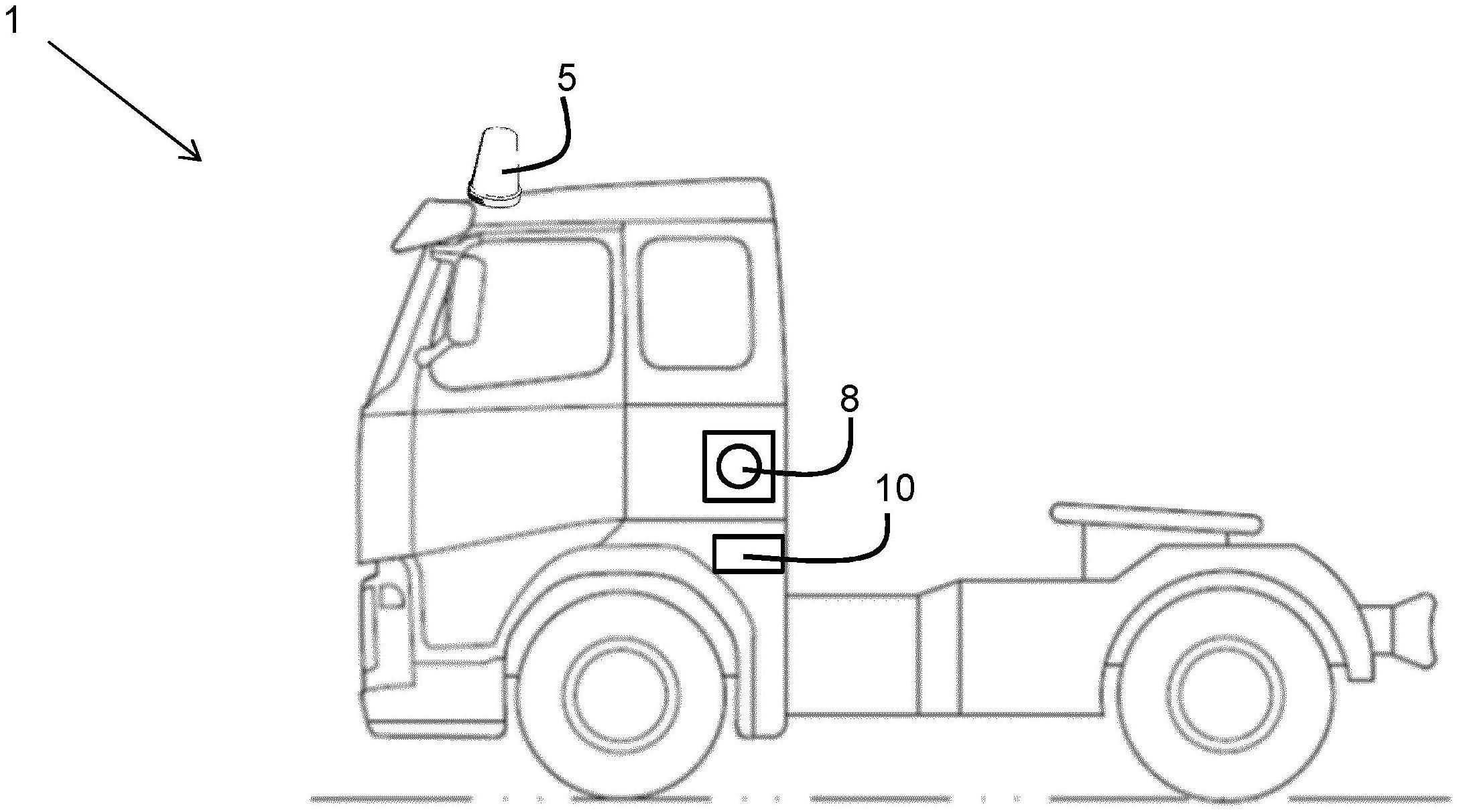
13.一种控制系统(100),所述控制系统(100)包括根据权利要求12所述的控制单元(10)、至少一个光源(5)和至少一个输入设备(8、13)。
14.一种车辆(1),所述车辆(1)包括根据权利要求12所述的控制单元(10)。
技术总结
本公开内容涉及一种由控制单元(10)执行的用于操控车辆(1)的安全停止模式方法。控制单元获得用于启用安全停止模式的启用请求。当已经获得启用请求时,控制单元(10)验证是否满足车辆(1)的所有安全条件。当已经获得启用请求并且满足所有安全条件时,控制单元(10)启用安全停止模式。当满足所有安全条件时,控制单元(10)触发至少一个光源(5)被点亮。在安全停止模式已经被启用之后,控制单元(10)获得用于禁用车辆(1)的安全停止模式的禁用请求。当已经获得禁用请求时,控制单元(10)禁用车辆(1)的安全停止模式。
技术研发人员:乔纳斯·哈格斯坎斯
受保护的技术使用者:沃尔沃自主解决方案公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!