使用概率占用栅格控制移动工业机器人的系统和方法与流程
本公开涉及机器人导航领域,并且特别地,涉及用于基于表示机器人能够在其上移动的基板的概率占用栅格来控制移动工业机器人的方法和设备。
背景技术:
1、对于开发用于支持移动工业机器人中的控制系统的感知机制的问题,已经进行了并还在进行着大量的研究。令人满意的感知机制应该使得机器人能够在受限和有人的环境中有效地导航,同时避免破坏性的碰撞。与不同高程的其它对象、具有小尺寸的对象、透明或反射的对象、暗或黑的对象混合的对象,已知地都会给试图发现和正确评估它们的感知机制造成困难。
2、所谓的占用栅格或概率图,是用于对移动机器人的可导航环境建模的常用工具。占用栅格的单元利用中性概率值初始化,随后基于所获取的传感器数据进行改进。在chr.robbiano等人的预印本(bayesian learning of occupancy grid,从arxiv.org/abs/1911.07915检索)中讨论了基于从移动平台进行的传感器测量序列来更新这种概率图的问题。
3、特别针对可导航环境寻址由二维占用栅格建模的室内移动机器人应用,本公开旨在改进现有技术。
技术实现思路
1、一个目的是提供用于提供占用栅格以支持移动工业机器人的控制的可用的方法和设备。另一个目的是基于颜色深度传感器(特别是机器人安装的颜色深度传感器)的连续测量来使得能够进行这种占用栅格的维护和连续改进。一个特别的目的是提出适用于rgb-d(红-绿-蓝加深度,即,彩色图像和深度图)测量是可用的使用情形的有效数据处理技术。
2、这些和其它的目的是通过根据由独立权利要求限定的本发明的方法和机器人控制器来实现。从属权利要求针对本发明的实施例。
3、在第一方面,一种控制在基板上可移动的工业机器人的方法包括:初始化单元的占用栅格,每个单元表示基板的一部分并且与一些物理对象存在于单元中的占用概率相关联;以及获取基板的高程图和色度图。基于高程图,计算每个单元的平均高程,并且以使得较高的第一部分占用概率对应于较大的平均高程的方式,从平均高程导出第一部分占用概率。基于色度图,估计色度的分布并且标识主要值(dominant value),并且基于关于单元的色度、以使得如果单元的色度是主色度值之一则计算分配较低的第二部分占用概率的方式计算第二占用概率。针对每个单元,合并第一部分概率和第二部分概率,并且该结果构成分配给占用栅格中的单元的占用概率。因此,提供的占用栅格可以用作控制工业机器人的基础。
4、本发明人已经认识到,为了判断单元是空闲的还是被占用的,有利的是识别全局主色度值并且搜索以下单元:单元中单元的色度值同时属于全局主色度值并且高程值相对较小。基于该组合的准则因此是用于构建在合理时间内收敛、产生高度精确的占用栅格、或两者,的算法的有用工具。因此,减少了机器人等待生成新占用栅格(或用于现有的占用栅格的更新)所花费的潜在的生产时钟时间。同样,机器人导航可以变得更安全和更精确。
5、在第二方面,提供了一种用于控制至少一个移动工业机器人的机器人控制器。该机器人控制器包括输入接口、处理电路装置和输出接口,并且它被配置为执行上述方法。
6、本发明还涉及包含指令的计算机程序,所述指令用于使计算机或特别是机器人控制器执行上述方法。计算机程序可以存储或分布在数据载体上。如这里所使用的,“数据载体”可以是诸如调制的电磁或光波的暂态数据载体,或非暂态数据载体。非暂态数据载体包括易失性和非易失性存储器,例如磁、光或固态类型的永久和非永久存储器。仍然在“数据载体”的范围内,这种的存储器可以是固定安装的或便携式的。
7、通常,权利要求中使用的所有术语将根据其在技术领域中的普通含义来解释,除非在此另外明确定义。所有对“一/一种/所述元件、装置、组件、部件、步骤等”的引用。除非另外明确说明,否则将被开放地解释为涉及元件、装置、组件、部件、步骤等的至少一个实例。除非明确说明,本文公开的任何方法的步骤不必以所公开的确切顺序执行。
技术特征:
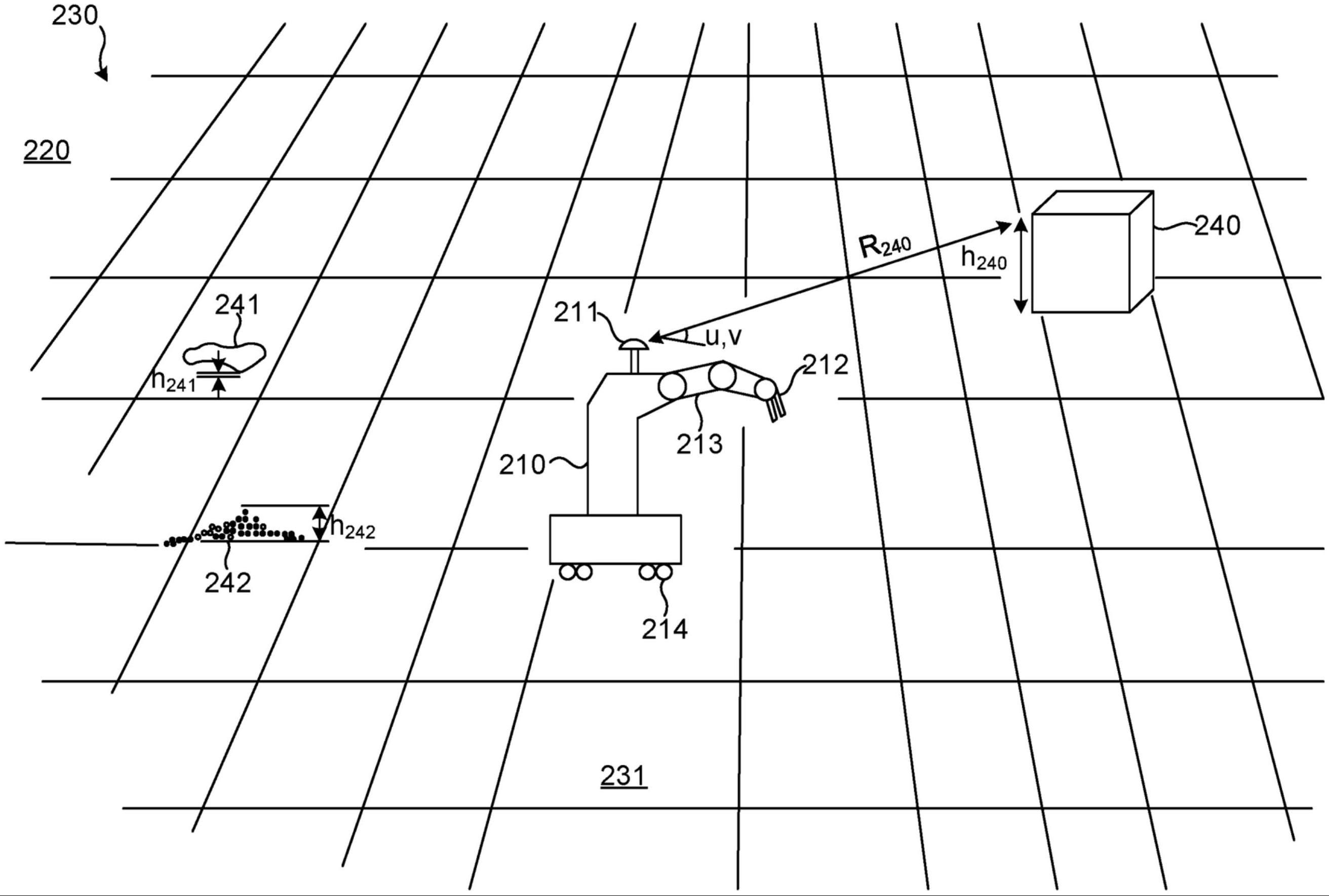
1.一种控制工业机器人(210)的方法(100),所述工业机器人在基板(220)上能够移动,包括:
2.根据权利要求1所述的方法,其中所述高程图和所述色度图从rgb-d传感器(211)被获取。
3.根据权利要求1或2所述的方法,还包括:在计算所述平均高程之前,消除(130)所述高程的离群值和/或所述高程的物理上无法达到的值和/或所述基板的远程区域的高程的值。
4.根据前述权利要求中任一项所述的方法,其中所述估计所述色度的分布包括形成具有预定筐的直方图。
5.根据前述权利要求中任一项所述的方法,其中所述色度图包括通过归一化像素强度值的三元组而获取的二维色度空间中的值。
6.根据前述权利要求中任一项所述的方法,其中所述合并(160)所述第一部分占用概率和所述第二部分占用概率包括计算加权平均。
7.根据前述权利要求中任一项所述的方法,其中所述合并(160)还包括:针对每个单元,将所述第一部分占用概率和所述第二部分占用概率与所述单元的预先存在的占用概率合并。
8.一种机器人控制器(300),被配置为控制在基板(220)上能够移动的至少一个工业机器人(210),所述机器人控制器包括:
9.一种计算机程序,所述计算机程序包括指令,所述指令用于使根据权利要求8所述的机器人控制器执行根据权利要求1至7中任一项所述的方法。
10.一种数据载体,所述数据载体存储根据权利要求9所述的计算机程序。
技术总结
基于单元(231)的占用栅格(230)来控制在基板(220)上可移动的机器人(210),其中每个单元与某一物理对象(240、241、242)存在于单元中的占用概率相关联。根据高程图和色度图,可以如下分配占用概率:从每个单元的平均高程导出第一部分占用概率px;估计色度的分布并标识主色度值;应用规则:如果单元的色度是色度图中的主色度值之一,则当单元的色度是主色度值时,将较低的第二部分占用概率p2分配给该单元;通过合并第一部分占用概率和第二部分占用概率获取占用概率。
技术研发人员:波利希罗尼斯·孔塔沙克斯
受保护的技术使用者:ABB瑞士股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!