用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法与流程
1.本发明属于车载光电稳定瞄准技术领域,涉及一种用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法。
背景技术:
2.车载光电观瞄系统包括可见光、热像和激光测距机等,具备独立搜索功能,双向稳定,方位向周视搜索,俯仰向特定角度搜索等能力。在独立搜索时,操纵杆的速度匹配、顺滑度对使用者来说十分必要。但在手动搜索瞄准时,对于操纵杆的速度修正非常重要;通常需要在低速时保持精细的控制精度,在高速时能快速转动。经典的控制曲线是一条线性控制曲线或者二次曲线,这种曲线都无法满足使用者的需求,且在修改曲线时,需要复杂的公式计算曲线参数。
技术实现要素:
3.(一)发明目的
4.本发明的目的是:提供一种用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,车载光电观瞄系统手动搜索瞄准时,加入贝塞尔曲线缓动环节,通过非线性映射关系,达到对操纵杆的输入进行缓动的效果,实现低速时保持精细的控制精度,在高速时能快速转动。
5.(二)技术方案
6.为了解决上述技术问题,本发明提供一种用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,所述处理方法在车载光电伺服控制系统中加入对操纵杆的贝塞尔曲线缓动环节。
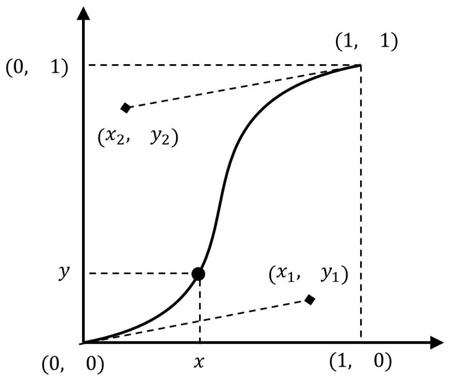
7.优选地,所述贝塞尔曲线缓动环节中采用的缓动数学函数模型是二维贝塞尔曲线,二维贝塞尔曲线为非线性函数曲线,将操纵杆输出的控制信号作为二维贝塞尔曲线的自变量x,通过二维贝塞尔曲线计算所对应非线性函数的变量y,将该变量y作为经过缓动的控制信号,输出到下一个环节。
8.优选地,在所述贝塞尔曲线上设置n个控制点(x
i
,y
i
),i的取值范围为0至n,当i=0时表示起点,值为(0,0),当i=n时表示终点,值为(1,1)。
9.优选地,所述贝塞尔曲线缓动环节中,设计贝塞尔曲线分辨率f,f为正整数,设计贝塞尔曲线的采样间距为δt=1/f。
10.优选地,基于所述采样间距,在所述二维贝塞尔曲线上设计t个离散坐标点(x
t
,y
t
),t的取值范围为0至f。
11.优选地,所述贝塞尔曲线缓动环节中,先计算离散点,再在操纵阶段计算缓动,操作步骤包括:
12.步骤1、计算离散点阶段,通过下述两个函数计算缓动函数的离散点,其中t的取值范围是0至f:
[0013][0014][0015]
步骤2、操纵阶段,获取操纵杆的输入量x,其取值范围为[0,1];
[0016]
步骤3、操纵阶段,在步骤1计算的结果中搜索两个离散点(x
t
,y
t
)和(x
t+1
,y
t+1
),使x∈[x
t
,x
t+1
];
[0017]
步骤4、操纵阶段,通过线性插值公式,在两个离散点(x
t
,y
t
)和(x
t+1
,y
t+1
)中间,通过插值计算x对应的坐标点y。
[0018]
(三)有益效果
[0019]
上述技术方案所提供的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,是对车载光电稳定瞄准控制环节进行充分调研、分析和科学论证后研发的新技术,在光电稳定的手动搜索瞄准时,对操纵杆的控制率加入基于贝塞尔缓动曲线,实现了低速时保持精细的控制精度,在高速时能快速转动;贝塞尔曲线的参数是曲线的扭曲控制点,具有直观的数学意义,可以方便操作人员根据自己的习惯修改曲线参数,提高操纵杆的控制准确率。
附图说明
[0020]
图1是本发明的一种用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法原理框图。
[0021]
图2是二维三次贝塞尔曲线的数学函数曲线。
[0022]
图3是伺服控制执行流程图。
具体实施方式
[0023]
为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
[0024]
如图1所示,本实施例用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,该方法主要针对在车载光电伺服控制系统中加入对操纵杆的贝塞尔曲线缓动环节;
[0025]
所述贝塞尔曲线缓动环节中采用的缓动数学函数模型是二维贝塞尔曲线,二维贝塞尔曲线为非线性函数曲线,将操纵杆输出的控制信号作为二维贝塞尔曲线的自变量x,通过二维贝塞尔曲线计算所对应非线性函数的变量y,将该变量y作为经过缓动的控制信号,输出到下一个环节,通过该非线性函数的映射关系达到缓动处理效果;
[0026]
设计贝塞尔曲线的4个控制点为(x
i
,y
i
),如图2所示,i的取值范围为0至3,当i=0时表示起点,值为(0,0),当i=3时表示终点,值为(1,1);
[0027]
设计贝塞尔曲线分辨率f=1000,f为正整数,设计贝塞尔曲线的采样间距为δt=1/f=0.001。
[0028]
设计t个离散坐标点(x
t
,y
t
),t的取值范围为0至1000;
[0029]
先计算离散点,再在操纵阶段计算缓动,如图3所示,所述伺服控制执行以下操作步骤:
[0030]
步骤1、计算离散点阶段,通过下述两个函数计算缓动函数的离散点,其中t的取值范围是0至1000:
[0031][0032][0033]
步骤2、操纵阶段,获取操纵杆的输入量x,其取值范围为[0,1];
[0034]
步骤3、操纵阶段,在步骤1计算的结果中搜索离散点,必定可以搜索到两个离散点(x
t
,y
t
)和(x
t+1
,y
t+1
)使x∈[x
t
,x
t+1
];
[0035]
步骤4、操纵阶段,通过线性插值公式,在两个离散点(x
t
,y
t
)和(x
t+1
,y
t+1
)中间,通过插值计算x对应的坐标点y。
[0036]
由上述技术方案可以看出,本发明在光电稳定的手动搜索瞄准时,对操纵杆的控制率加入基于贝塞尔缓动曲线,实现了低速时保持精细的控制精度,在高速时能快速转动;贝塞尔曲线的参数是曲线的扭曲控制点,具有直观的数学意义,可以方便操作人员根据自己的习惯修改曲线参数,提高操纵杆的控制准确率。
[0037]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
技术特征:
1.一种用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,所述处理方法在车载光电伺服控制系统中加入对操纵杆的贝塞尔曲线缓动环节。2.如权利要求1所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,所述贝塞尔曲线缓动环节中采用的缓动数学函数模型是二维贝塞尔曲线,二维贝塞尔曲线为非线性函数曲线,将操纵杆输出的控制信号作为二维贝塞尔曲线的自变量x,通过二维贝塞尔曲线计算所对应非线性函数的变量y,将该变量y作为经过缓动的控制信号,输出到下一个环节。3.如权利要求2所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,在所述贝塞尔曲线上设置n个控制点(x
i
,y
i
),i的取值范围为0至n,当i=0时表示起点,值为(0,0),当i=n时表示终点,值为(1,1)。4.如权利要求3所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,所述贝塞尔曲线缓动环节中,设计贝塞尔曲线分辨率f,f为正整数,设计贝塞尔曲线的采样间距为δt=1/f。5.如权利要求4所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,基于所述采样间距,在所述二维贝塞尔曲线上设计t个离散坐标点(x
t
,y
t
),t的取值范围为0至f。6.如权利要求5所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,所述贝塞尔曲线缓动环节中,先计算离散点,再在操纵阶段计算缓动,操作步骤包括:步骤1、计算离散点阶段,通过下述两个函数计算缓动函数的离散点,其中t的取值范围是0至f:至f:步骤2、操纵阶段,获取操纵杆的输入量x,其取值范围为[0,1];步骤3、操纵阶段,在步骤1计算的结果中搜索两个离散点(x
t
,y
t
)和(x
t+1
,y
t+1
),使x∈[x
t
,x
t+1
];步骤4、操纵阶段,通过线性插值公式,在两个离散点(x
t
,y
t
)和(x
t+1
,y
t+1
)中间,通过插值计算x对应的坐标点y。7.如权利要求1所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,在所述贝塞尔曲线上设置4个控制点为(x
i
,y
i
),i的取值范围为0至3,当i=0时表示起点,值为(0,0),当i=3时表示终点,值为(1,1)。8.如权利要求7所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,所述贝塞尔曲线分辨率f=1000,f为正整数,贝塞尔曲线的采样间距为δt=1/f=0.001。9.如权利要求8所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,所述二维贝塞尔曲线上设计t个离散坐标点(x
t
,y
t
),t的取值范围为0至1000。
10.如权利要求9所述的用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,其特征在于,所述贝塞尔曲线缓动环节中,先计算离散点,再在操纵阶段计算缓动,操作步骤包括:步骤1、计算离散点阶段,通过下述两个函数计算缓动函数的离散点,其中t的取值范围是0至1000:至1000:步骤2、操纵阶段,获取操纵杆的输入量x,其取值范围为[0,1];步骤3、操纵阶段,在步骤1计算的结果中搜索离散点,必定可以搜索到两个离散点(x
t
,y
t
)和(x
t+1
,y
t+1
)使x∈[x
t
,x
t+1
];步骤4、操纵阶段,通过线性插值公式,在两个离散点(x
t
,y
t
)和(x
t+1
,y
t+1
)中间,通过插值计算x对应的坐标点y。
技术总结
本发明属于车载光电稳定瞄准技术领域,公开了一种用于车载光电伺服控制系统的贝塞尔曲线缓动处理方法,所述处理方法在车载光电伺服控制系统中加入对操纵杆的贝塞尔曲线缓动环节;贝塞尔曲线缓动环节中采用的缓动数学函数模型是二维贝塞尔曲线,二维贝塞尔曲线为非线性函数曲线,将操纵杆输出的控制信号作为二维贝塞尔曲线的自变量x,通过二维贝塞尔曲线计算所对应非线性函数的变量y,将该变量y作为经过缓动的控制信号,输出到下一个环节。本发明在光电稳定的手动搜索瞄准时,对操纵杆的控制率加入基于贝塞尔缓动曲线,实现了低速时保持精细的控制精度,在高速时能快速转动。在高速时能快速转动。在高速时能快速转动。
技术研发人员:张兰兰 韩伟 寿少峻 郭新胜 米建军 张芳 李彰 宋亚民 王克林 冯颖
受保护的技术使用者:西安应用光学研究所
技术研发日:2021.08.27
技术公布日:2021/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1