一种无人机停靠姿态的校正方法以及无人机停靠设备与流程
本说明书涉及无人驾驶领域,尤其涉及一种无人机停靠姿态的校正方法以及无人机停靠设备。
背景技术:
1、目前,无人设备广泛应用于各个行业。以无人机执行配送任务为例,无人机执行完配送任务后,无人机降落到无人机停靠平台上,无人机停靠平台需要对无人机停靠位置、停靠角度和停靠方向进行校正,以便对无人机进行后续操作,比如换电池。
2、现有技术中提供一种无人机停靠平台,无人机停靠平台的四周设置四个推杆,包括:第一推杆和第二推杆,并且无人机停靠平台表面设置四个限位槽。当对支脚存在底板结构的无人机进行校正时,四个推杆沿四个限位槽以及推杆导轨同时相向移动,对无人机进行校正。如图1所示。
3、但是,在对无人机进行校正时,现有技术中的推杆的平整表面与无人机的支脚滑动摩擦,长时间可能导致无人机的支脚磨损严重,从而增加不必要的资源浪费。
技术实现思路
1、本说明书实施例提供一种无人机停靠姿态的校正方法以及无人机停靠设备,以部分解决上述现有技术存在的问题。
2、本说明书实施例采用下述技术方案:
3、本说明书提供的一种无人机停靠姿态的校正方法,用于无人机停靠的无人机停靠设备,所述无人机停靠设备设置有停靠平台、驱动装置、设置在所述停靠平台上可移动的推杆,所述推杆中面向所述停靠平台中心的侧面内嵌有若干个滚子,所述方法包括:
4、接收无人机降落指令;
5、根据所述无人机降落指令,控制所述无人机停靠设备设置的所述驱动装置,以使所述驱动装置驱动位于所述停靠平台上的推杆向所述停靠平台内侧移动,以便通过所述推杆与无人机的支脚之间的相对滚动,对所述无人机进行校正。
6、可选地,在根据所述无人机降落指令,控制所述无人机停靠设备设置的所述驱动装置之前,所述方法还包括:
7、当接收到所述无人机降落指令时,控制所述无人机停靠设备设置的所述驱动装置,以使所述驱动装置驱动所述推杆向所述停靠平台外侧移动;
8、在所述推杆向所述停靠平台外侧移动之后,向服务器发送停靠指示,以使所述服务器根据接收到的停靠指示,向所述无人机发送停靠指令,以便所述无人机根据所述停靠指令停靠于所述停靠平台内侧。
9、可选地,根据所述无人机降落指令,控制所述无人机停靠设备设置的所述驱动装置,具体包括:
10、当所述无人机停靠于所述停靠平台内侧时,根据所述无人机降落指令中的无人机类型,确定所述无人机的无人机类型;
11、确定与所述无人机类型对应的驱动数据;其中,所述驱动数据用于表示针对所述无人机类型所确定的控制所述推杆在所述停靠平台移动的距离;
12、根据所述驱动数据,控制所述无人机停靠设备设置的所述停靠平台内部的驱动装置。
13、可选地,所述驱动装置为伺服电机,所述方法还包括:
14、监控所述驱动装置驱动所述推杆进行移动时的力矩;
15、若所述力矩大于预设的力矩阈值,控制所述驱动装置停止驱动。
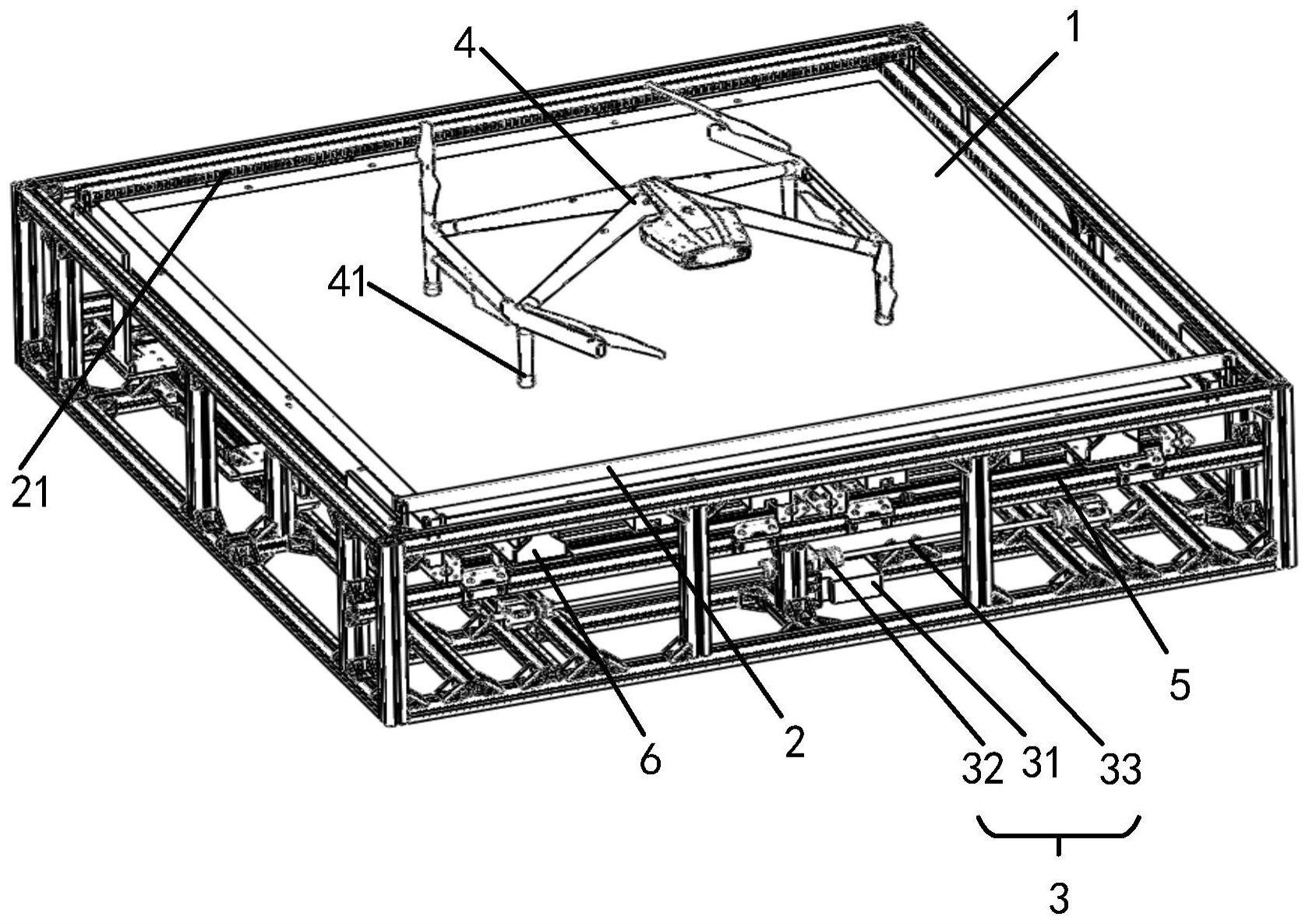
16、本说明书提供的一种无人机停靠设备,所述无人机停靠设备包括:停靠平台(1)、设置在所述停靠平台(1)上可移动的推杆(2)、驱动装置(3);其中,所述停靠平台(1)上设置至少四个所述推杆(2);
17、所述推杆(2)中面向所述停靠平台(1)中心的侧面内嵌有若干个滚子(21),且所述若干个滚子(21)从面向所述停靠平台(1)中心的侧面突出;
18、在所述驱动装置(3)驱动所述推杆(2)对无人机(4)进行校正过程中,所述推杆(2)内嵌的滚子(21)与所述无人机(4)的支脚(41)之间产生滚动摩擦。
19、可选地,所述滚子(21)的硬度小于所述无人机(4)的支脚(41)的硬度。
20、可选地,针对所述若干个滚子(21)中的任意两个相邻的滚子(21),该相邻的两个滚子(21)中心之间的间距与所述滚子(21)的直径的差值不超过设定长度。
21、可选地,所述无人机停靠设备还包括:推杆移动组件(5);
22、所述驱动装置(3)、所述推杆移动组件(5)位于所述停靠平台(1)内部;
23、所述驱动装置(3)通过控制所述推杆移动组件(5)带动所述推杆(2)在所述停靠平台(1)上移动。
24、可选地,所述无人机停靠设备还包括:推杆连接板(6);
25、所述推杆(2)的两端分别连接有推杆连接板(6);
26、所述推杆连接板(6)用于连接所述推杆(2)与所述推杆移动组件(5),且所述推杆连接板(6)部分位于所述停靠平台(1)内部。
27、可选地,所述推杆移动组件(5)包括:滑座(51);
28、所述推杆(2)与所述推杆连接板(6)的一端连接,所述推杆连接板(6)的另一端与所述滑座(51)连接。
29、可选地,所述驱动装置(3)包括:驱动电机(31)、连接器(32)、驱动轴(33),所述驱动轴(33)与所述推杆移动组件(5)连接;
30、所述驱动电机(31)通过所述连接器(32)带动所述驱动轴(33)转动。
31、可选地,所述推杆移动组件(5)包括:同步轮(52)、同步带(53);
32、所述驱动轴(33)与所述同步轮(52)相连接;
33、当所述驱动电机(31)驱动所述驱动轴(33)转动时,所述同步轮(52)带动所述同步带(53)传动,并通过所述同步带(53)的传动带动所述推杆(2)进行移动。
34、本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:
35、本说明书实施例中无人机降落于无人机停靠设备上,无人机停靠设备中的停靠平台上设置校正无人机姿态的推杆,推杆面向停靠平台中心的侧面内嵌若干个滚子,当推杆对无人机的姿态进行校正时,推杆内嵌的滚子与无人机的支脚之间产生滚动摩擦,从而减轻对无人机支脚的磨损,并节省了资源。
技术特征:
1.一种无人机停靠姿态的校正方法,其特征在于,用于无人机停靠的无人机停靠设备,所述无人机停靠设备设置有停靠平台、驱动装置、设置在所述停靠平台上可移动的推杆,所述推杆中面向所述停靠平台中心的侧面内嵌有若干个滚子,所述方法包括:
2.如权利要求1所述的方法,其特征在于,在根据所述无人机降落指令,控制所述无人机停靠设备设置的所述驱动装置之前,所述方法还包括:
3.如权利要求2所述的方法,其特征在于,根据所述无人机降落指令,控制所述无人机停靠设备设置的所述驱动装置,具体包括:
4.如权利要求1所述的方法,其特征在于,所述驱动装置为伺服电机,所述方法还包括:
5.一种无人机停靠设备,其特征在于,所述无人机停靠设备包括:停靠平台(1)、设置在所述停靠平台(1)上可移动的推杆(2)、驱动装置(3);其中,所述停靠平台(1)上设置至少四个所述推杆(2);
6.如权利要求5所述的无人机停靠设备,其特征在于,所述滚子(21)的硬度小于所述无人机(4)的支脚(41)的硬度。
7.如权利要求5所述的无人机停靠设备,其特征在于,针对所述若干个滚子(21)中的任意两个相邻的滚子(21),该相邻的两个滚子(21)中心之间的间距与所述滚子(21)的直径的差值不超过设定长度。
8.如权利要求5所述的无人机停靠设备,其特征在于,所述无人机停靠设备还包括:推杆移动组件(5);
9.如权利要求8所述的无人机停靠设备,其特征在于,所述无人机停靠设备还包括:推杆连接板(6);
10.如权利要求9所述的无人机停靠设备,其特征在于,所述推杆移动组件(5)包括:滑座(51);
11.如权利要求8所述的无人机停靠设备,其特征在于,所述驱动装置(3)包括:驱动电机(31)、连接器(32)、驱动轴(33),所述驱动轴(33)与所述推杆移动组件(5)连接;
12.如权利要求11所述的无人机停靠设备,其特征在于,所述推杆移动组件(5)包括:同步轮(52)、同步带(53);
技术总结
本说明书公开了一种无人机停靠姿态的校正方法以及无人机停靠设备,本说明书实施例无人机降落于无人机停靠设备上,无人机停靠设备中的停靠平台上设置校正无人机姿态的推杆,推杆面向停靠平台中心的侧面内嵌若干个滚子,当推杆对无人机的姿态进行校正时,推杆内嵌的滚子与无人机的支脚之间产生滚动摩擦,从而减轻对无人机支脚的磨损,并节省了资源。
技术研发人员:王振鹏,龚玉帅,冯春雨,张笃礼,王兴元
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!