作业区域确定方法、装置、终端和存储介质与流程
本申请涉及计算机领域,具体涉及作业区域确定方法、装置、终端和存储介质。
背景技术:
1、工作区域中的作业区域可以是施工场地、设备的工作场地等,其中,作业区域为施工场地时,机器人可以在作业区域进行施工工作,作业区域为工作场地时,作业区域为运行设备的场地。目前,作业区域中需要机器人工作时,机器人只能依靠用户手动输入的位置参数才能获知作业区域的区域范围。
2、然而,现有机器人获知作业区域的效率较低,不利于机器人在工作区域中中快速确定出作业区域。
技术实现思路
1、本申请实施例提供作业区域确定方法、装置、终端和存储介质,可以提升机器人获知作业区域的效率。
2、本申请实施例提供一种作业区域确定方法,包括:
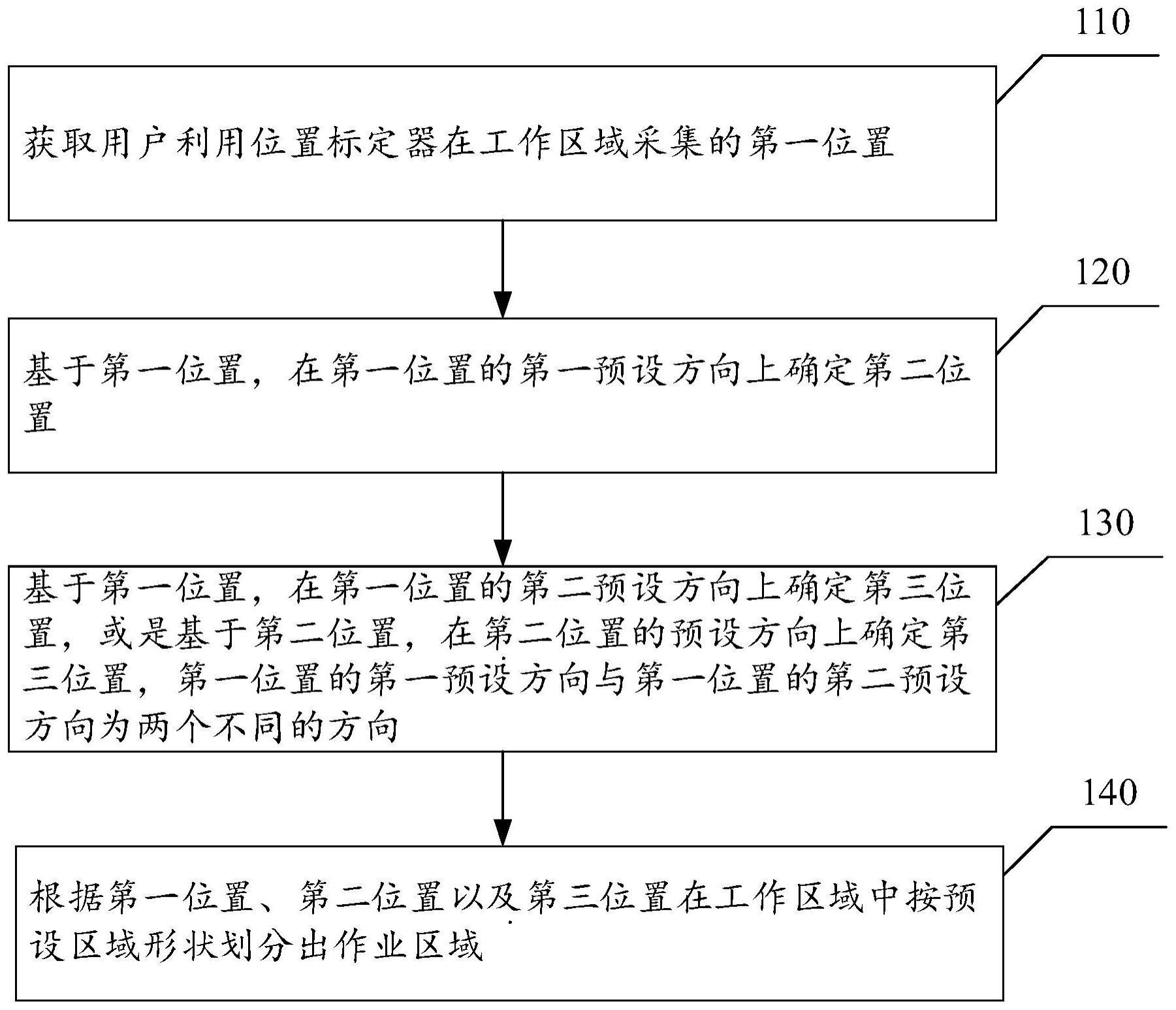
3、获取用户利用位置标定器在工作区域采集的第一位置;
4、基于第一位置,在第一位置的第一预设方向上确定第二位置;
5、基于第一位置,在第一位置的第二预设方向上确定第三位置,或是基于第二位置,在第二位置的预设方向上确定第三位置,第一位置的第一预设方向与第一位置的第二预设方向为两个不同的方向;
6、根据第一位置、第二位置以及第三位置在工作区域中按预设区域形状划分出作业区域。
7、本申请实施例还提供一种作业区域确定装置,包括:
8、第一位置获取单元,用于获取用户在工作区域设置的第一位置;
9、第二位置确定单元,用于基于第一位置,在第一位置的预设方向上确定第二位置;
10、第三位置确定单元,用于基于第一位置,在第一位置的第二预设方向上确定第三位置,或是基于第二位置,在第二位置的预设方向上确定第三位置,第一位置的第一预设方向与第一位置的第二预设方向为两个不同的方向;
11、作业区域确定单元,用于根据第一位置、第二位置以及第三位置在工作区域中按预设的区域形状划分出作业区域。
12、在一些实施例中,作业区域确定单元,用于:
13、根据第一位置、第二位置以及第三位置确定第四位置;
14、将第一位置、第二位置、第三位置以及第四位置按照预设区域形状连接,得到在工作区域中的作业区域。
15、在一些实施例中,根据第一位置、第二位置以及第三位置确定第四位置,包括:
16、将第一位置和第二位置连接,得到第一边界线;
17、将第二位置和第三位置连接,得到第二边界线;
18、根据第一边界线以及第一边界线到第三位置的距离,得到第三边界线;
19、根据第二边界线以及第二边界线到所述第一位置的距离,得到第四边界线;
20、根据第三边界线和第四边界线的交点,确定第四位置。
21、在一些实施例中,工作区域中包括多个作业区域,多个作业区域包括第一作业区域和第二作业区域,在将第一位置、所述第二位置、第三位置以及第四位置按照预设区域形状连接,得到在工作区域中的作业区域之后,还包括:
22、获取多个作业区域中的端点位置,作业区域的端点位置包括第一位置、第二位置、第三位置以及第四位置;
23、当第一作业区域的两个端点位置在第二作业区域内、或在第二作业区域的边界上时,将第一作业区域和第二作业区域拼接。
24、在一些实施例中,作业区域的形状为矩形或三角形。
25、在一些实施例中,基于第一位置,在第一位置的第一预设方向上确定第二位置,包括:
26、获取用户输入的第一长度值;
27、根据第一长度值和所述第一位置,在第一位置的第一预设方向上确定第二位置;
28、基于第一位置,在第一位置的第二预设方向上确定第三位置,或是基于第二位置,在第二位置的预设方向上确定第三位置,包括:
29、获取用户输入的第二长度值;
30、根据第二长度值和第一位置,在第一位置的第二预设方向上确定第三位置,或是根据第二长度值和所述第二位置,在第二位置的预设方向上确定第三位置。
31、在一些实施例中,工作区域划分为多个预设区域形状的作业区域,且相邻作业区域的边界区域重叠,边界区域为相邻所述作业区域共同拥有的区域。
32、本申请实施例还提供一种终端,包括存储器存储有多条指令;所述处理器从所述存储器中加载指令,以执行本申请实施例所提供的任一种作业区域确定方法中的步骤。
33、本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行本申请实施例所提供的任一种作业区域确定方法中的步骤。
34、本申请实施例可以获取用户利用位置标定器在工作区域采集的第一位置;基于第一位置,在第一位置的第一预设方向上确定第二位置;基于第一位置,在第一位置的第二预设方向上确定第三位置,或是基于第二位置,在第二位置的预设方向上确定第三位置,第一位置的第一预设方向与第一位置的第二预设方向为两个不同的方向;根据第一位置、第二位置以及第三位置在工作区域中按预设区域形状划分出作业区域。
35、在本申请中,获取用户利用位置标定器在工作区域中采集第一位置,从而根据第一位置可以快速确定出第二位置和第三位置,再根据第一位置、第二位置以及第三位置在工作区域中按预设区域形状划分出作业区域,因此,本方案可以提升机器人获知作业区域的效率,以便于机器人可以在作业区域内工作。
技术特征:
1.一种作业区域确定方法,其特征在于,包括:
2.如权利要求1所述的作业区域确定方法,其特征在于,所述根据所述第一位置、所述第二位置以及所述第三位置在所述工作区域中划分出作业区域,包括:
3.如权利要求2所述的作业区域确定方法,其特征在于,所述根据所述第一位置、所述第二位置以及所述第三位置确定第四位置,包括:
4.如权利要求2所述的作业区域确定方法,其特征在于,所述工作区域中包括多个作业区域,所述多个作业区域包括第一作业区域和第二作业区域,在所述将所述第一位置、所述第二位置、所述第三位置以及所述第四位置按照预设区域形状连接,得到在所述工作区域中的作业区域之后,还包括:
5.如权利要求1所述的作业区域确定方法,其特征在于,所述作业区域的形状为矩形或三角形。
6.如权利要求1所述的作业区域确定方法,其特征在于,所述基于所述第一位置,在第一位置的第一预设方向上确定第二位置,包括:
7.如权利要求1所述的作业区域确定方法,其特征在于,所述工作区域划分为多个预设区域形状的所述作业区域,且相邻所述作业区域的边界区域重叠,所述边界区域为相邻所述作业区域共同拥有的区域。
8.一种作业区域确定装置,其特征在于,包括:
9.一种终端,其特征在于,包括处理器和存储器,所述存储器存储有多条指令;所述处理器从所述存储器中加载指令,以执行如权利要求1~7任一项所述的作业区域确定方法中的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行权利要求1~7任一项所述的作业区域确定方法中的步骤。
技术总结
本申请实施例公开了作业区域确定方法、装置、终端和存储介质;本申请实施例获取用户利用位置标定器在工作区域采集的第一位置;基于第一位置,在第一位置的第一预设方向上确定第二位置;基于第一位置,在第一位置的第二预设方向上确定第三位置,或是基于第二位置,在第二位置的预设方向上确定第三位置,第一位置的第一预设方向与第一位置的第二预设方向为两个不同的方向;根据第一位置、第二位置以及第三位置在工作区域中按预设区域形状划分出作业区域。在本申请实施例中,可以提升机器人获知作业区域的效率,以便于机器人可以在作业区域内工作。
技术研发人员:杨辉,刘天恒,彭辉,桂仲成
受保护的技术使用者:成都圭目机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!