一种时间敏感的摆渡无人机路径规划算法
本发明涉及一种时间敏感的摆渡无人机路径规划算法,属于无人机网络领域。
背景技术:
1、近些年来,随着电子技术、传感器技术和通信技术等的发展,无人机成为了一种很有前途的军事和民用的新应用领域,设备小型化和成本降低提高了无人机的性能及可用性,使得无人机在搜救、监测、探测等工业、农业、军事、救灾领域得到了广泛的应用。
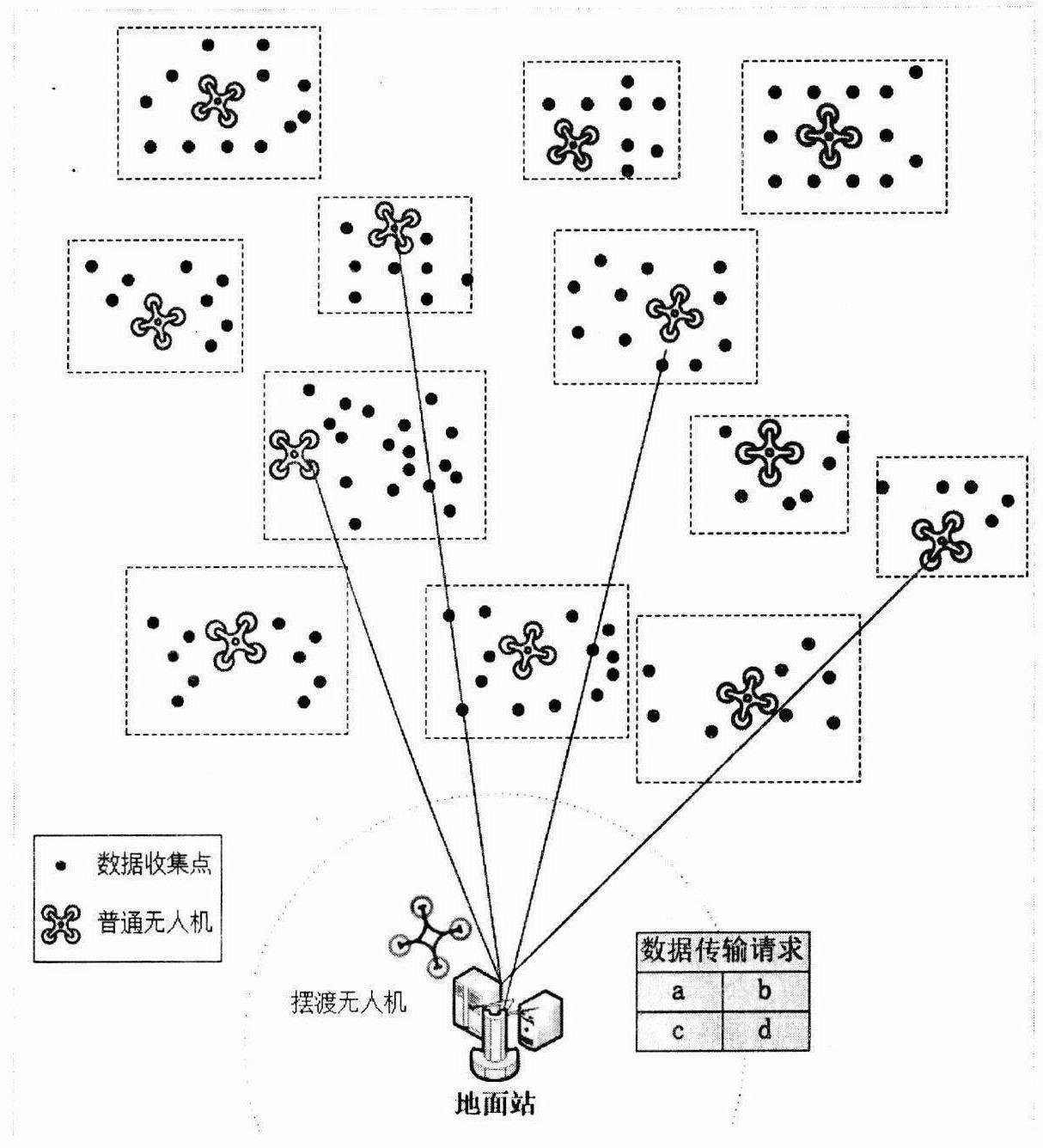
2、由于无人机的可移动性,在多无人机应用中一个重要挑战便是多无人机间的协同通信[1],受到dtn网络的启发,开始向无人机网络中引入摆渡无人机,摆渡无人机是一种用于数据传输和转发的无人机,其飞行路径会被精心设计以满足网络数据收集的特定需求,所以摆渡无人机的飞行路径设计对于网络的效率有着重大的影响。
3、目前有一些无人机的路径规划算法已经开始考虑数据收集的时间敏感性问题,[2]的作者提出了一种无人机-无线传感器网络的最优轨道规划问题,其中无人机用于收集传感器节点产生的数据,作者将信息年龄定义为数据上传时间和无人机离开所经过的时间,提出了最小化最大信息年龄和最小化平均信息年龄的两种路径规划算法。[3]的作者提出了一种新的质量感知和节能的无人机覆盖和路径规划方案,设计了一种基于遮挡感知的路径点生成算法,同时使用无人机在全局期限内访问所有的路径点,并使通过路径点的最大能量最小化。
4、上述路径规划算法对于时间的考虑都是从整体上进行,而对于实际的情况比如监视和遥感的应用环境,所采集的每个数据都有不同的时间期限,所以需要根据数据采集的时间时间和截止时间,分别计算每个数据的过期时间,这样才能实现采集数据的有效性,而据目前所知,已有的文献中没有对上述单独时间敏感度进行限制。
5、为了解决上述的问题,本发明提出了时间敏感的摆渡无人机路径规划算法,在每个数据收集点都具有不同的时间期限的情况下进行数据收集作业,本发明的目标是最小化摆渡节点的路径,同时最大化收集点的数量。本发明提出的方案可以在摆渡节点路径长度、能量消耗和数据收集率几个方面的性能指标上取得很好的性能。
6、上文中提到的文献来源如下:
7、[1]asadpour m,hummel k a,giustiniano d,et al.route or carry:motion-driven packet forwarding in micro aerial vehicle networks[j].ieeetransactions on mobile computing,2016,16(3):843-856.
8、[2]j.liu,x.wang,b.bai,and h.dai,“age-optimal trajectory planning foruav-assisted data collection,”in ieee infocom 2018-ieee conference oncomputer communications workshops(infocom wkshps).ieee,2018,pp.553-558.
9、[3]r.dai,s.fotedar,m.radmanesh,and m.kumar,“quality-aware uavcoverage and path planning in geometrically complex environments,”ad hocnetworks,vol.73,02 2018.
技术实现思路
1、本发明为解决的技术问题:
2、本发明的目的是设计一种时间敏感的摆渡无人机路径规划算法,用于解决目前无人机网络中摆渡无人机路径规划算法在不同时间期限数据收集情况下的问题。本发明中的算法主要考虑数据具有不同的时间期限,以最小化摆渡无人机飞行路径长度和最大化数据收集率为目标,算法中首先根据数据收集点的时间期限生成基线路径,然后通过调整数据收集点顺序的方式对路径进行优化,最后对路径进行全局优化,实现了以高数据收集率,低成本的性能进行摆渡无人机的路径规划,具有一定的原创性。
3、本发明为解决其技术问题采用如下技术方案:
4、一种时间敏感的摆渡无人机路径规划算法,包括以下步骤:
5、(1)数据传输请求收集:普通无人机向地面站发送数据传输请求,地面站将数据传输请求存储在消息队列中;
6、(2)数据传输请求排序:地面站计算每个数据传输请求的优先级,并进行排序;
7、(3)基线路径规划:地面站通过数据传输请求的优先级进行基线路径规划;
8、(4)路径优化:地面站对基线路径进行数据收集点的顺序调整;
9、(5)全局优化:地面站根据普通无人机的活动区域对路径进行全局优化。
10、本发明采用以上技术方案与现有技术相比,具有以下有益效果:
11、(1)在数据收集点时间敏感的情况下进行数据收集,解决了目前算法中没有考虑过不同时间期限的问题。
12、(2)通过时间期限和路径长度结合的方式进行路径规划,先从局部优化,然后全局优化,进一步减少路径长度。
13、(3)算法在数据收集率和摆渡无人机路径长度方面的性能相比于现有方案明显提高。
技术特征:
1.一种时间敏感的摆渡无人机路径规划算法,包括以下步骤:
2.如权利要求1所述的数据传输请求收集,包括以下内容:
3.如权利要求1所述的数据传输请求排序,包括以下内容:
4.如权利要求1所述的基线路径规划,包括以下内容:
5.如权利要求1所述的路径优化,包括以下内容:
6.如权利要求1所述的全局优化,包括以下内容:
技术总结
本发明涉及一种时间敏感的摆渡无人机路径规划算法,属于无人机网络领域。本发明适用于无人机自组织网络,网络中的节点被分为普通节点和摆渡节点两种,摆渡节点负责数据收集,普通节点负责监控数据收集点的数据,每个数据收集点都具有不同的时间期限,即需要在一定时间内进行采集。本发明的目标是最小化摆渡节点的路径,同时最大化收集点的数量,首先根据数据收集点的时间期限进行排序,生成基线摆渡节点路线,然后通过数据收集点顺序调整进行路径的优化和调整,最后进行全局路径优化,得到最终摆渡节点路径。本发明适用于具有不同时间期限的数据收集情况,可以在摆渡节点路径长度、能量消耗和数据收集率几个方面的性能指标上取得很好的性能。
技术研发人员:刘亮,吴雨亭
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!