家居设备的运行状态的控制方法及设备与流程
本申请涉及智能家居,特别涉及一种家居设备的运行状态的控制方法及设备。
背景技术:
1、室内空间通常安装有家居设备。用户在进入室内空间后,可以手动控制家居设备的运行状态,以使家居设备为该用户提供相应的服务。
技术实现思路
1、本申请实施例提供了一种家居设备的运行状态的控制方法及设备,能够确定室内空间中目标对象的身份。所述技术方案如下:
2、一方面,提供了一种家居设备的运行状态的控制方法,应用于所述室内空间中的控制设备,所述室内空间的入口处安装有身份识别设备,且所述室内空间中安装有多个雷达,所述多个雷达的检测范围覆盖所述室内空间的各个区域;所述方法包括:
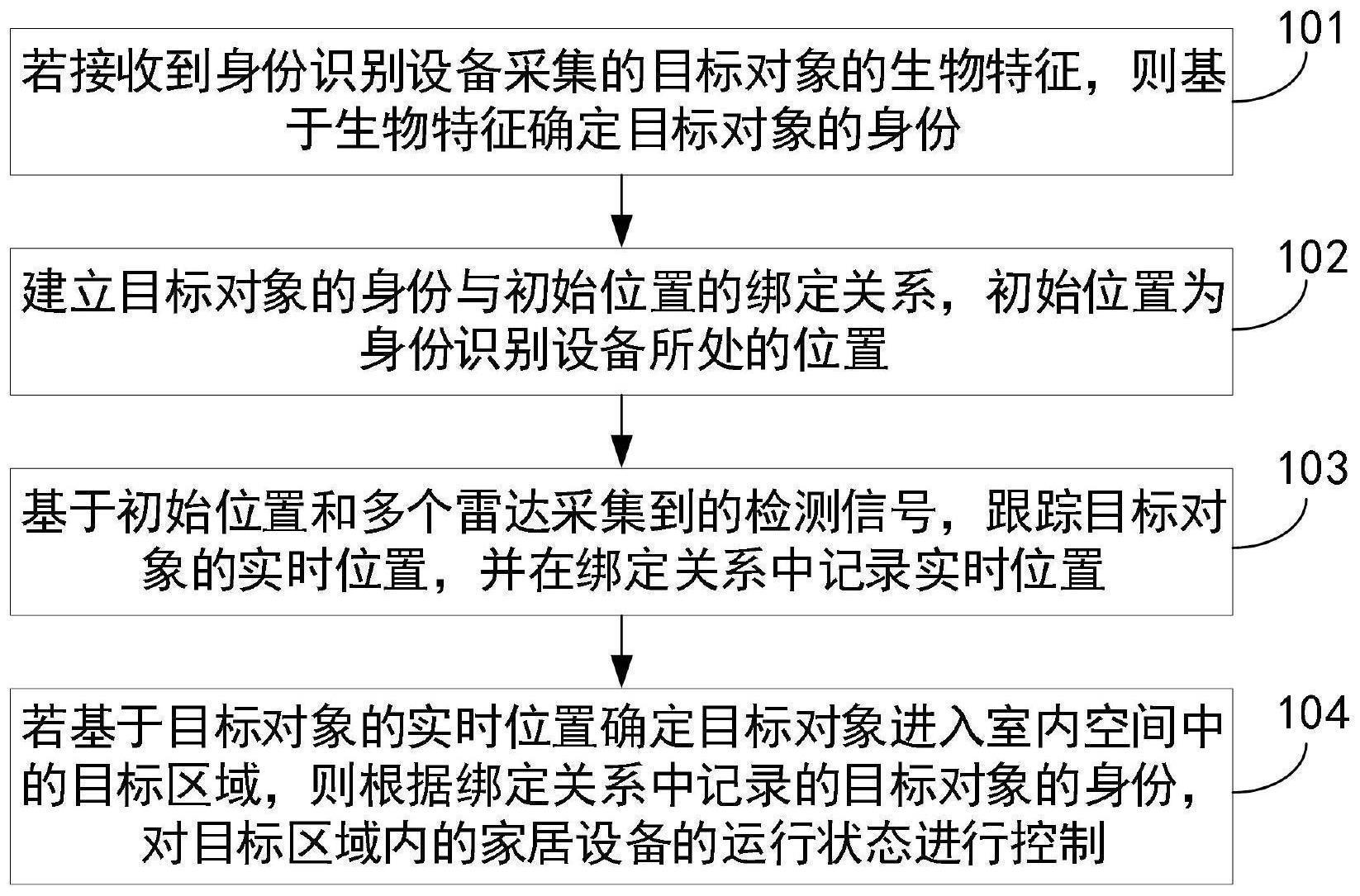
3、若接收到所述身份识别设备采集的目标对象的生物特征,则基于所述生物特征确定所述目标对象的身份;
4、建立所述目标对象的身份与初始位置的绑定关系,所述初始位置为所述身份识别设备所处的位置;
5、基于所述初始位置和所述多个雷达采集到的检测信号,跟踪所述目标对象的实时位置,并在所述绑定关系中记录所述实时位置;
6、若基于所述目标对象的实时位置确定所述目标对象进入所述室内空间中的目标区域,则根据所述绑定关系中记录的所述目标对象的身份,对所述目标区域内的家居设备的运行状态进行控制。
7、另一方面,提供了一种家居设备的运行状态的控制设备,所述家居设备位于室内空间中,所述室内空间的入口处安装有身份识别设备,且所述室内空间中安装有多个雷达,所述多个雷达的检测范围覆盖所述室内空间的各个区域;所述控制设备包括:处理器;所述处理器用于:
8、若接收到所述身份识别设备采集的目标对象的生物特征,则基于所述生物特征确定所述目标对象的身份;
9、建立所述目标对象的身份与初始位置的绑定关系,所述初始位置为所述身份识别设备所处的位置;
10、基于所述初始位置和所述多个雷达采集到的检测信号,跟踪所述目标对象的实时位置,并在所述绑定关系中记录所述实时位置;
11、若基于所述目标对象的实时位置确定所述目标对象进入所述室内空间中的目标区域,则根据所述绑定关系中记录的所述目标对象的身份,对所述目标区域内的家居设备的运行状态进行控制。
12、可选的,所述处理器用于:
13、基于所述多个雷达在第一时刻采集到的检测信号,确定所述室内空间中每个对象在所述第一时刻的位置;
14、将与所述初始位置之间的距离小于第一距离阈值的位置确定为所述目标对象在所述第一时刻的位置;
15、基于所述多个雷达在第二时刻采集到的检测信号,确定所述室内空间中每个对象在所述第二时刻的位置;
16、将与所述目标对象在所述第一时刻的实时位置之间的距离小于第二距离阈值的位置确定为所述目标对象的在所述第二时刻的位置。
17、可选的,所述处理器还用于:
18、基于所述多个雷达在第一时刻采集到的检测信号,确定所述室内空间中每个对象在所述第一时刻的移动速度;
19、基于所述多个雷达在第二时刻采集到的检测信号,确定所述室内空间中每个对象在所述第二时刻的移动速度;
20、所述将与所述目标对象在所述第一时刻的实时位置之间的距离小于第二距离阈值的位置确定为所述目标对象的在所述第二时刻的位置,包括:
21、若任一对象在所述第二时刻的位置与所述目标对象在所述第一时刻的位置之间的距离小于第二距离阈值,且所述任一对象在所述第二时刻的移动速度与所述目标对象在所述第一时刻的移动速度的差值小于速度阈值,则将所述任一对象在所述第二时刻的位置确定为所述目标对象在所述第二时刻的实时位置。
22、可选的,所述检测信号包括:每个所述对象在雷达坐标系中的原始位置。所述处理器用于:
23、对于每个所述对象,基于所述雷达坐标系与所述室内空间的空间坐标系之间的转换关系,以及所述对象在所述第一时刻的原始位置,确定在所述第一时刻所述对象在所述空间坐标系中的位置。
24、可选的,在所述第一时刻所述对象在所述空间坐标系中的位置(xm,ym)满足下述公式:
25、
26、其中,(x′m,y′m)为所述对象的所述原始位置,(xn,yn)为所述雷达坐标系的原点在所述空间坐标系中的位置,αn为旋转角度,所述旋转角度是指所述雷达坐标系的第一坐标轴或第二坐标轴,在达到所述雷达坐标系的第一坐标轴与所述空间坐标系的第一坐标轴平行,且所述雷达坐标系的第二坐标轴与所述空间坐标系的第二坐标轴平行的效果时所需旋转的角度。
27、可选的,所述处理器还用于:
28、若基于所述多个雷达采集到的检测信号确定所述目标对象不位于所述室内空间内,则删除所述绑定关系。
29、可选的,所述多个雷达中的每个雷达与的检测范围与至少一个其他雷达的检测范围存在重叠区域。
30、可选的,所述控制设备为图像采集设备,所述生物特征为所述目标对象的人脸图像;
31、或者,所述控制设备为指纹采集设备,所述生物特征为所述目标对象的指纹。
32、可选的,所述处理器还用于:
33、若基于所述目标对象的实时位置确定所述目标对象离开所述目标区域,则控制所述家居设备停止运行。
34、又一方面,提供了一种家居设备的运行状态的控制设备,所述控制设备包括:存储器,处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述方面所述的家居设备的运行状态的控制方法。
35、再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序由处理器加载并执行以实现如上述方面所述的家居设备的运行状态的控制方法。
36、再一方面,提供了一种包含指令的计算机程序产品,当所述计算机程序产品在所述计算机上运行时,使得所述计算机执行上述方面所述的家居设备的运行状态的控制方法。
37、本申请实施例提供的技术方案带来的有益效果至少包括:
38、本申请实施例提供了一种家居设备的运行状态的控制方法及设备,身份识别设备采集到对象的生物特征时,控制设备可以建立该对象的身份与初始位置的绑定关系,之后即可根据该绑定关系准确确定跟踪该对象的实时位置,并基于该实时位置控制家居设备的运行状态。由此可见,本申请提供的方法无需用户手动操作,即可控制家居设备的运行状态,从而提高了家居设备的控制效率,且简化了用户的操作,提升了用户体验。此外,本申请提供的方法能够基于对象的身份控制家居设备的运行状态,即能够控制家居设备为不同身份的对象提供个性化服务,提高了家居设备的控制灵活性,且进一步提升了用户体验。
技术特征:
1.一种家居设备的运行状态的控制方法,其特征在于,应用于所述室内空间中的控制设备,所述室内空间的入口处安装有身份识别设备,且所述室内空间中安装有多个雷达,所述多个雷达的检测范围覆盖所述室内空间的各个区域;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述初始位置和所述多个雷达采集到的检测信号,跟踪所述目标对象的实时位置,包括:
3.根据权利要求2所述的方法,其特征在于,所述方法还包括:
4.根据权利要求2所述的方法,其特征在于,所述检测信号包括:每个所述对象在雷达坐标系中的原始位置;所述基于所述多个雷达在第一时刻采集到的检测信号,确定所述室内空间中每个对象在所述第一时刻的位置,包括:
5.根据权利要求4所述的方法,其特征在于,在所述第一时刻所述对象在所述空间坐标系中的位置(xm,ym)满足下述公式:
6.根据权利要求1至5任一所述的方法,其特征在于,在所述建立所述目标对象的身份与初始位置的绑定关系之后,所述方法还包括:
7.根据权利要求1至5任一所述的方法,其特征在于,所述多个雷达中的每个雷达与的检测范围与至少一个其他雷达的检测范围存在重叠区域。
8.根据权利要求1至5任一所述的方法,其特征在于,
9.根据权利要求1至5任一所述的方法,其特征在于,所述方法还包括:
10.一种家居设备的运行状态的控制设备,其特征在于,所述家居设备位于室内空间中,所述室内空间的入口处安装有身份识别设备,且所述室内空间中安装有多个雷达,所述多个雷达的检测范围覆盖所述室内空间的各个区域;所述控制设备包括:处理器;所述处理器用于:
技术总结
本申请公开了一种家居设备的运行状态的控制方法及设备,属于智能家居技术领域。身份识别设备采集到对象的生物特征时,控制设备可以建立该对象的身份与初始位置的绑定关系,之后即可根据该绑定关系准确确定跟踪该对象的实时位置,并基于该实时位置控制家居设备的运行状态。由此可见,本申请提供的方法无需用户手动操作,即可控制家居设备的运行状态,从而提高了家居设备的控制效率,且简化了用户的操作,提升了用户体验。此外,本申请提供的方法能够基于对象的身份控制家居设备的运行状态,即能够控制家居设备为不同身份的对象提供个性化服务,提高了家居设备的控制灵活性,且进一步提升了用户体验。
技术研发人员:邹振兴,王海亮,王磊
受保护的技术使用者:海信集团控股股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!