5G智能机器人控制系统的制作方法
5g智能机器人控制系统
技术领域
1.本实用新型涉及智能机器人控制技术领域,具体涉及一种5g智能机器人控制系统。
背景技术:
2.目前智能机器人普遍通过4g网络接收控制指令,随着5g网络的普及,急需一种5g智能机器人控制系统,能够通过5g网络接收控制指令。
技术实现要素:
3.为了克服现有技术的不足,本实用新型的目的是提供5g智能机器人控制系统,能够通过5g网络接收控制指令。
4.为了达到上述目的,本实用新型所采用的技术方案是:提供5g智能机器人控制系统,包括:
5.无线通讯单元,所述无线通讯单元用于接收通过5g网络发送的控制指令;
6.机器人控制器,所述机器人控制器用于对所述无线通讯单元传送的控制指令进行处理分析后传送至执行机构;
7.信号输入单元,所述信号输入单元用于将所述无线通讯单元传送的信号进行调整后,输出至所述机器人控制器;
8.传感器单元,所述传感器单元用于检测障碍物并将障碍物检测信号发送至所述机器人控制器单元,所述机器人控制器单元对障碍物检测信号进行处理分析后将相应执行指令传送至执行机构;
9.信号输出单元,所述信号输出单元用于将所述机器人控制器传送的控制指令转换为模拟信号后传送至执行机构;
10.存储单元,所述存储单元用于存储所述机器人控制器处理的数据;
11.供电单元,所述供电单元将供电电源电压调整为所述机器人控制器的工作电压,为所述机器人控制器提供工作电源;
12.所述无线通讯单元与所述信号输入单元电性相连,所述信号输入单元还与所述机器人控制器电性相连,所述机器人控制器还分别与所述传感器单元、所述存储单元、所述信号输出单元电性相连;
13.所述机器人控制器为atmega1280单片机。
14.进一步地,所述无线通讯单元包括sim卡插槽f10,电容c10、c11、c12、c13以及c14,所述sim卡插槽f10用于插入5g通信模块以接收5g信号,所述sim卡插槽f10的引脚1为电源功能脚vcc,所述sim卡插槽f10的引脚2为复位功能脚rst,所述sim卡插槽f10的引脚3为振荡功能脚clk,所述sim卡插槽f10的引脚5为接地功能脚gnd,所述sim卡插槽f10的引脚7为数据功能脚i/o;所述sim卡插槽f10的引脚1依次连接所述电容c13的一端和所述电容c11的一端后连接电源端,所述电容c13的另一端和所述电容c11的另一端相连后接地,所述sim卡
插槽f10的引脚2分别连接所述电阻r16的一端和所述电容c10的一端,所述电容c10的另一端接地,所述电阻r16的另一端连接复位接口端,所述sim卡插槽f10的引脚3分别连接所述电容c14的一端和所述电阻r17的一端,所述电容c14的另一端接地,所述电阻r17的另一端连接振荡时钟接口端,所述sim卡插槽f10的引脚5接地,所述sim卡插槽f10的引脚7分别连接所述电容c12的一端和所述电阻r18的一端,所述电容c12的另一端接地,所述电阻r18的另一端连接数据接口端以通过所述数据接口端连接所述信号输入单元。
15.进一步地,所述信号输入单元包括切换开关u12,运算放大器u2a、u2b以及u2c,三极管q222,电容c9、c333以及c1,电阻r17、r18、r131、r16、r48、r151、r7、r8、r2、r5、r6、r333、r12、r14、r1、r3、r9、r10以及r11;所述运算放大器u2a的正电源分别连接电源3.3v和所述电容c9的一端,所述电容c9的另一端接地,所述运算放大器u2a的负电源接地,所述运算放大器u2a的同相输入分别连接所述电阻r18的一端和所述电阻r17的一端,所述电阻r17的另一端接电源3.3v,所述电阻r18的另一端接地,所述运算放大器u2a的反相输入分别连接所述电阻r48的一端和所述运算放大器u2a的输出,所述运算放大器u2a的输出还分别连接所述电阻r131的一端和所述切换开关u12的引脚2,所述电阻r131的另一端连接所述运算放大器u2b的同相输入;所述电阻r6和所述电容c333并联后的一端分别连接所述电阻r151的一端和所述运算放大器u2b的反相输入,所述电阻r6和所述电容c333并联后的另一端分别连接所述运算放大器u2b的输出和所述切换开关u12的引脚1,所述切换开关u12的引脚4接检测信号正极,所述切换开关u12的引脚3接检测信号负极;所述电阻r151的另一端连接所述电阻r7的一端,所述电阻r7的另一端分别连接所述三极管q222的发射极和所述电阻r8的一端,所述电阻r8的另一端连接所述mcu接收检测信号的正极,所述三极管q222的集电极连接所述电阻r333,所述电阻r333的另一端接电源3.3v,所述三极管q222的基极分别连接所述电阻r6的一端和所述电阻r5的一端,所述电阻r6的另一端连接所述mcu接收检测信号的负极,所述电阻r5的另一端连接所述电阻r2的一端,所述电阻r2的另一端分别连接所述电容c1的一端和所述电阻r1的一端,所述电阻r1的另一端连接所述电阻r3的一端,所述电阻r3的另一端分别连接所述电阻r9的一端和所述运算放大器u2c的反相输入,所述电阻r9的另一端连接参考电压,所述运算放大器u2c的输入分别连接所述电阻r12的一端和所述电阻r14的一端,所述电阻r12的另一端连接所述电容c1的另一端,所述电阻r14的另一端连接电源电压,所述运算放大器u2c的同相输入分别连接所述电阻r10的一端和所述电阻r11的一端,所述电阻r10的另一端连接所述电阻r48的另一端,所述电阻r11的另一端连接参考电压。
16.进一步地,所述传感器单元为红外光电传感器,所述红外光电传感器将障碍物检测信号传送至所述机器人控制器。
17.进一步地,所述存储单元包括文件管理控制芯片u26,sd卡座芯片u18,flash芯片u14,电阻r125、r126、r145、r102、r101、r100、r127、r108、r172、r107、r106,电容c41、c42、c43、c57、c36,晶振y6;所述文件管理控制芯片u26的引脚2连接所述电阻r126一端,所述文件管理控制芯片u26的引脚3连接所述电阻r145一端,所述电阻r145另一端接地,所述文件管理控制芯片u26的引脚6连接所述电阻r125一端,所述文件管理控制芯片u26的引脚7接电源3.3v,所述文件管理控制芯片u26的引脚10接地,所述文件管理控制芯片u26的引脚20分别连接所述电容c41的一端和电源3.3v,所述电容c41的另一端接地,所述文件管理控制芯
片u26的引脚19连接所述电阻r102的一端,所述文件管理控制芯片u26的引脚18连接所述电阻r101的一端,所述文件管理控制芯片u26的引脚16连接所述电阻r100的一端,所述文件管理控制芯片u26的引脚15连接所述电阻r127的一端,所述文件管理控制芯片u26的引脚14连接所述电阻r108的一端,所述电阻r125、所述电阻r126、所述电阻r102、所述电阻r101、所述电阻r100、所述电阻r127以及所述电阻r108的另一端相连后接电源3.3v,所述文件管理控制芯片u26的引脚11分别连接所述电容c42的一端和所述晶振y6的一端,所述文件管理控制芯片u26的引脚12分别连接所述晶振y6的另一端和所述电容c43的一端,所述电容c43的另一端与所述电容c42的另一端相连后接地;所述sd卡座芯片u18的引脚9和所述sd卡座芯片u18的引脚11相连后接地,所述sd卡座芯片u18的引脚10分别连接所述sd卡座芯片u18的引脚12和所述电容c36的一端,所述sd卡座芯片u18的引脚12接地,所述sd卡座芯片u18的引脚4连接所述电容c36的另一端后接电源3.3v;所述flash芯片u14的引脚1连接所述电阻r107的一端,所述flash芯片u14的引脚3连接所述电阻r172的一端,所述电阻r172的另一端接地,所述flash芯片u14的引脚4接地,所述flash芯片u14的引脚7连接所述电阻r106的一端,所述flash芯片u14的引脚8连接所述电容c57的一端后连接所述电阻r106的另一端再与所述电阻r107的另一端相连后接电源3.3v,所述电容c57的另一端接地。
18.进一步地,所述信号输出单元包括模拟芯片u3,滤波l1,电容c8和c16,所述模拟芯片u3用于将数字信号转换为模拟信号,所述模拟芯片u3的引脚1分别接电源5v和所述电容c8的一端,所述电容c8的另一端接地,所述模拟芯片u3的引脚2分别接电源3.3v和所述电容c16的一端,所述电容c16的另一端接地,所述模拟芯片u3的引脚3的引脚4相连后连接所述滤波l1的一端,所述滤波l1的另一端接模拟信号输出端,所述模拟芯片u3的引脚5为信号触发端,所述模拟芯片u3的引脚6和引脚7为信号输出端,所述模拟芯片u3的引脚8接地。
19.进一步地,所述供电单元包括电源芯片u6,熔断器f1,电容c14和c15,稳压二极管d1,极性电容e1;所述熔断器f1的一端接电源5v,所述稳压二极管d1的正极与所述极性电容e1的负极连接后接地,所述熔断器f1的另一端分别连接所述稳压二极管d1的负极和所述极性电容e1的正极后接5v输出;所述电源芯片u6的引脚3分别接5v输出和所述电容c14的一端,所述电源芯片u6的引脚2分别接电源3.3v和所述电容c15的一端,所述电容c14的另一端和所述电容c15的另一端与所述电源芯片u6的引脚1相连后接地。
20.进一步地,所述运算放大器u2a、u2b以及u2c的型号为tlv2254,所述三极管q222的型号为npn型。
21.进一步地,所述文件管理控制芯片u26的型号为ch376t,所述flash芯片u14的型号为mx25l1605d。
22.进一步地,所述模拟芯片u3的型号为tpc116s1。
23.本实用新型的有益效果在于,本实用新型提供的5g智能机器人控制系统,包括无线通讯单元、机器人控制器、信号输入单元、传感器单元、信号输出单元、存储单元、供电单元,无线通讯单元用于接收通过5g网络发送的控制指令,机器人控制器用于对无线通讯单元传送的控制指令进行处理分析后传送至执行机构,传感器单元用于检测障碍物并将障碍物检测信号发送至机器人控制器单元,机器人控制器单元对障碍物检测信号进行处理分析后将相应执行指令传送至执行机构,信号输出单元用于将机器人控制器传送的控制指令转换为模拟信号传送至执行机构,存储单元用于存储机器人控制器处理的数据,供电单元为
机器人控制器提供工作电源;与现有技术相比,本实用新型能够通过5g网络接收控制指令。
附图说明
24.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
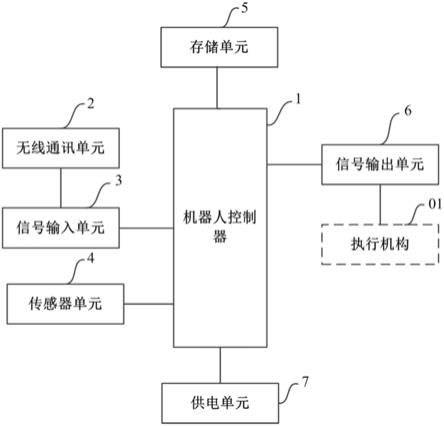
25.图1是本实用新型实施例提供的5g智能机器人控制系统的系统组成框图。
26.图2是本实用新型实施例提供的5g智能机器人控制系统的无线通讯单元电路原理图。
27.图3是本实用新型实施例提供的5g智能机器人控制系统的信号输入单元电路原理图。
28.图4是本实用新型实施例提供的5g智能机器人控制系统的存储单元电路原理图。
29.图5是本实用新型实施例提供的5g智能机器人控制系统的信号输出单元电路原理图。
30.图6是本实用新型实施例提供的5g智能机器人控制系统的供电单元电路原理图。
31.上述图中的标记为1、机器人控制器;2、无线通讯单元;3、信号输入单元;4、传感器单元;5、存储单元;6、信号输出单元;7、供电单元;01、执行机构。
具体实施方式
32.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
33.本实用新型的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
34.以下结合附图与具体实施例,对本实用新型的技术方案做详细的说明。
35.如图1至图6所示,为本实用新型提供的较佳实施例。
36.参照图1,本实用新型提供的5g智能机器人控制系统,包括:
37.无线通讯单元2,无线通讯单元2用于接收通过5g网络发送的控制指令;
38.机器人控制器1,机器人控制器1用于对无线通讯单元2传送的控制指令进行处理分析后传送至执行机构01;
39.信号输入单元3,信号输入单元3用于将无线通讯单元2传送的信号进行调整后,输出至机器人控制器1;
40.传感器单元4,传感器单元4用于检测障碍物并将障碍物检测信号发送至机器人控制器1单元,机器人控制器1单元对障碍物检测信号进行处理分析后将相应执行指令传送至
执行机构01;
41.信号输出单元6,信号输出单元6用于将机器人控制器1传送的控制指令转换为模拟信号后传送至执行机构01;
42.存储单元5,存储单元5用于存储机器人控制器1处理的数据;
43.供电单元7,供电单元7将供电电源电压调整为机器人控制器1的工作电压,为机器人控制器1提供工作电源;
44.无线通讯单元2与信号输入单元3电性相连,信号输入单元3还与机器人控制器1电性相连,机器人控制器1还分别与传感器单元4、存储单元5、信号输出单元6电性相连;
45.机器人控制器1为atmega1280单片机。
46.具体地,atmega1280单片机为高性能、低功耗的avr8位微处理器,具有先进的risc结构:能够同时处理135条指令且大多数指令可以在一个时钟周期内完成,全静态工作,工作于16mhz时性能高达16mips,只需两个时钟周期的硬件乘法器;具有jtag接口,通过jatg接口实现对flash、eeprom熔丝位和锁定位的编程;能够上电复位以及可编程的掉电检测。
47.上述技术方案提供的5g智能机器人控制系统,包括无线通讯单元2、机器人控制器1、信号输入单元3、传感器单元4、信号输出单元6、存储单元5、供电单元7,无线通讯单元2用于接收通过5g网络发送的控制指令,机器人控制器1用于对无线通讯单元2传送的控制指令进行处理分析后传送至执行机构01,传感器单元4用于检测障碍物并将障碍物检测信号发送至机器人控制器1单元,机器人控制器1单元对障碍物检测信号进行处理分析后将相应执行指令传送至执行机构01,信号输出单元6用于将机器人控制器1传送的控制指令转换为模拟信号传送至执行机构01,存储单元5用于存储机器人控制器1处理的数据,供电单元7为机器人控制器1提供工作电源;与现有技术相比,本实用新型能够通过5g网络接收控制指令。
48.作为本实用新型的一种实施方式,参照图2,无线通讯单元2包括sim卡插槽f10,电容c10、c11、c12、c13以及c14,sim卡插槽f10用于插入5g通信模块以接收5g信号,sim卡插槽f10的引脚1为电源功能脚vcc,sim卡插槽f10的引脚2为复位功能脚rst,sim卡插槽f10的引脚3为振荡功能脚clk,sim卡插槽f10的引脚5为接地功能脚gnd,sim卡插槽f10的引脚7为数据功能脚i/o;sim卡插槽f10的引脚1依次连接电容c13的一端和电容c11的一端后接电源端simvcc,电容c13的另一端和电容c11的另一端相连后接地,sim卡插槽f10的引脚2分别连接电阻r16的一端和电容c10的一端,电容c10的另一端接地,电阻r16的另一端连接复位接口端simrst,sim卡插槽f10的引脚3分别连接电容c14的一端和电阻r17的一端,电容c14的另一端接地,电阻r17的另一端连接振荡时钟接口端simclk,sim卡插槽f10的引脚5接地,sim卡插槽f10的引脚7分别连接电容c12的一端和电阻r18的一端,电容c12的另一端接地,电阻r18的另一端连接数据接口端simdata以通过数据接口端simdata连接信号输入单元3。
49.优选地,sim卡插槽f10为市面已有的公开的能够支持5g通信模块的sim卡插槽;5g通信模块为市面已有的公开的封装的5g通信模块,例如sim8200g。
50.作为本实用新型的一种实施方式,参照图3,信号输入单元3包括切换开关u12,运算放大器u2a、u2b以及u2c,三极管q222,电容c9、c333以及c1,电阻r17、r18、r131、r16、r48、r151、r7、r8、r2、r5、r6、r333、r12、r14、r1、r3、r9、r10以及r11;运算放大器u2a的正电源分别连接电源3.3v和电容c9的一端,电容c9的另一端接地,运算放大器u2a的负电源接地,运算放大器u2a的同相输入分别连接电阻r18的一端和电阻r17的一端,电阻r17的另一端接电
源3.3v,电阻r18的另一端接地,运算放大器u2a的反相输入分别连接电阻r48的一端和运算放大器u2a的输出,运算放大器u2a的输出还分别连接电阻r131的一端和切换开关u12的引脚2,电阻r131的另一端连接运算放大器u2b的同相输入;电阻r6和电容c333并联后的一端分别连接电阻r151的一端和运算放大器u2b的反相输入,电阻r6和电容c333并联后的另一端分别连接运算放大器u2b的输出和切换开关u12的引脚1,切换开关u12的引脚4接检测信号正极,切换开关u12的引脚3接检测信号负极;电阻r151的另一端连接电阻r7的一端,电阻r7的另一端分别连接三极管q222的发射极和电阻r8的一端,电阻r8的另一端连接mcu1接收检测信号的正极,三极管q222的集电极连接电阻r333,电阻r333的另一端接电源3.3v,三极管q222的基极分别连接电阻r6的一端和电阻r5的一端,电阻r6的另一端连接mcu1接收检测信号的负极,电阻r5的另一端连接电阻r2的一端,电阻r2的另一端分别连接电容c1的一端和电阻r1的一端,电阻r1的另一端连接电阻r3的一端,电阻r3的另一端分别连接电阻r9的一端和运算放大器u2c的反相输入,电阻r9的另一端连接参考电压,运算放大器u2c的输入分别连接电阻r12的一端和电阻r14的一端,电阻r12的另一端连接电容c1的另一端,电阻r14的另一端连接电源电压,运算放大器u2c的同相输入分别连接电阻r10的一端和电阻r11的一端,电阻r10的另一端连接电阻r48的另一端,电阻r11的另一端连接参考电压。
51.作为本实用新型的一种实施方式,传感器单元4为红外光电传感器,红外光电传感器将障碍物检测信号传送至机器人控制器1。优选地,红外光电传感器为市面已有的公开的能够检测障碍物的红外线传感器。
52.作为本实用新型的一种实施方式,参照图4,存储单元5包括文件管理控制芯片u26,sd卡座芯片u18,flash芯片u14,电阻r125、r126、r145、r102、r101、r100、r127、r108、r172、r107、r106,电容c41、c42、c43、c57、c36,晶振y6;文件管理控制芯片u26的引脚2连接电阻r126一端,文件管理控制芯片u26的引脚3连接电阻r145一端,电阻r145另一端接地,文件管理控制芯片u26的引脚6连接电阻r125一端,文件管理控制芯片u26的引脚7接电源3.3v,文件管理控制芯片u26的引脚10接地,文件管理控制芯片u26的引脚20分别连接电容c41的一端和电源3.3v,电容c41的另一端接地,文件管理控制芯片u26的引脚19连接电阻r102的一端,文件管理控制芯片u26的引脚18连接电阻r101的一端,文件管理控制芯片u26的引脚16连接电阻r100的一端,文件管理控制芯片u26的引脚15连接电阻r127的一端,文件管理控制芯片u26的引脚14连接电阻r108的一端,电阻r125、电阻r126、电阻r102、电阻r101、电阻r100、电阻r127以及电阻r108的另一端相连后接电源3.3v,文件管理控制芯片u26的引脚11分别连接电容c42的一端和晶振y6的一端,文件管理控制芯片u26的引脚12分别连接晶振y6的另一端和电容c43的一端,电容c43的另一端与电容c42的另一端相连后接地;sd卡座芯片u18的引脚9和sd卡座芯片u18的引脚11相连后接地,sd卡座芯片u18的引脚10分别连接sd卡座芯片u18的引脚12和电容c36的一端,sd卡座芯片u18的引脚12接地,sd卡座芯片u18的引脚4连接电容c36的另一端后接电源3.3v;flash芯片u14的引脚1连接电阻r107的一端,flash芯片u14的引脚3连接电阻r172的一端,电阻r172的另一端接地,flash芯片u14的引脚4接地,flash芯片u14的引脚7连接电阻r106的一端,flash芯片u14的引脚8连接电容c57的一端后连接电阻r106的另一端再与电阻r107的另一端相连后接电源3.3v,电容c57的另一端接地。
53.作为本实用新型的一种实施方式,参照图5,信号输出单元6包括模拟芯片u3,滤波
l1,电容c8和c16,模拟芯片u3用于将数字信号转换为模拟信号,模拟芯片u3的引脚1分别接电源5v和电容c8的一端,电容c8的另一端接地,模拟芯片u3的引脚2分别接电源3.3v和电容c16的一端,电容c16的另一端接地,模拟芯片u3的引脚3的引脚4相连后连接滤波l1的一端,滤波l1的另一端接模拟信号输出端,模拟芯片u3的引脚5为信号触发端,模拟芯片u3的引脚6和引脚7为信号输出端,模拟芯片u3的引脚8接地。
54.作为本实用新型的一种实施方式,参照图6,供电单元7包括电源芯片u6,熔断器f1,电容c14和c15,稳压二极管d1,极性电容e1;熔断器f1的一端接电源5v,稳压二极管d1的正极与极性电容e1的负极连接后接地,熔断器f1的另一端分别连接稳压二极管d1的负极和极性电容e1的正极后接5v输出;电源芯片u6的引脚3分别接5v输出和电容c14的一端,电源芯片u6的引脚2分别接电源3.3v和电容c15的一端,电容c14的另一端和电容c15的另一端与电源芯片u6的引脚1相连后接地。
55.优选地,运算放大器u2a、u2b以及u2c的型号为tlv2254,三极管q222的型号为npn型。
56.优选地,文件管理控制芯片u26的型号为ch376t,flash芯片u14的型号为mx25l1605d。
57.优选地,模拟芯片u3的型号为tpc116s1。
58.优选地,电源芯片u6的型号为bl8503。
59.以上对本实用新型的实施例进行了详细的说明,但本实用新型的创造并不限于本实用新型,熟悉本领域的技术人员在不违背本实用新型精神的前提下,还可以做出许多同等变型或替换,这些同等变型或替换均包含在本技术的权利要求所限定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1