控制回路优化的制作方法
本发明涉及用于驱动系统的闭环控制。
背景技术:
1、调谐控制回路是将其控制参数(比例带/增益、积分增益/复位、微分增益/速率)调整到所需控制响应的最佳值。稳定性(无界振荡)是基本要求,但除此之外,不同的系统具有不同的行为,不同的应用具有不同的要求,并且要求可能彼此冲突。
2、pid控制器在工业中广泛使用,是数十年来最流行的控制器。因此,即使pid设计中的小的改进也可能在世界范围内具有主要影响。在时域和频域上有许多关于pid调谐算法的理论和实践论文。它们使用分析、图形或经验方法,包括人工智能。
3、有几种用于调谐pid回路的方法。最有效的方法通常包括开发某种形式的处理模型,然后基于动态模型参数选择p、i和d。手动调谐方法可能相对耗时,特别是对于具有长循环时间的系统。
4、类似模数最优或对称最优的传统调谐技术可应用于许多功率电子应用的控制回路的设计。当在数字控制系统中直接实现时,这将导致降低的稳定性裕度,因为对于控制器设计没有考虑采样效果。
5、在电驱动领域中,在该参数优化中经常采用两种方法:avo和so准则,即绝对值最优(avo)和对称最优(so)准则。
6、这些效应的平衡是通过回路调谐以产生最佳控制函数来实现的,调谐常数必须为每个控制应用导出,因为它们取决于控制器外部的整个回路的响应特性。对于整个控制函数,kp、kd、ki都是非负的,并且分别表示比例项、积分项和导数项的系数(有时表示为p、i和d)。其中,kp是比例增益、调谐参数,ki是积分增益、另一个调谐参数,kd是导数增益、又一个调谐参数。
7、例如,能够进行手动调谐,但是需要有经验的人员。
技术实现思路
1、因此,本发明的一个目的是优选地以一种自动的方式改进驱动系统的控制回路的控制准确度,并且识别哪些参数需要进一步调谐,特别是在需要调谐多个参数的情况下。
2、根据以下方面实现该目的。
3、根据第一方面,一种优化转换器的控制回路准确度的方法。例如:提出了一种转换器的控制系统。该方法包括获取由转换器供电的驱动系统的实际值的步骤。该方法还包括:基于机器学习模型和实际值,推断控制回路的控制参数的一个或多个调整,以提高控制准确度;以及输出调整以适应控制参数值。
4、根据第二方面,提出了一种用于执行根据第一方面的方法步骤的转换器。
5、根据第三方面,提出了一种训练机器学习模型的方法。该方法包括以下步骤:基于(虚拟)驱动系统的实际值来训练机器学习模型,这些实际值包括实际旋转速度、旋转速度设定点、实际转矩,以及控制差。
6、另外的实施例是从属权利要求的主题并且也在下面描述。
技术特征:
1.一种优化转换器(1)的控制回路(10)的方法,例如,优化转换器(1)的控制系统(20)的方法,所述方法包括以下步骤:
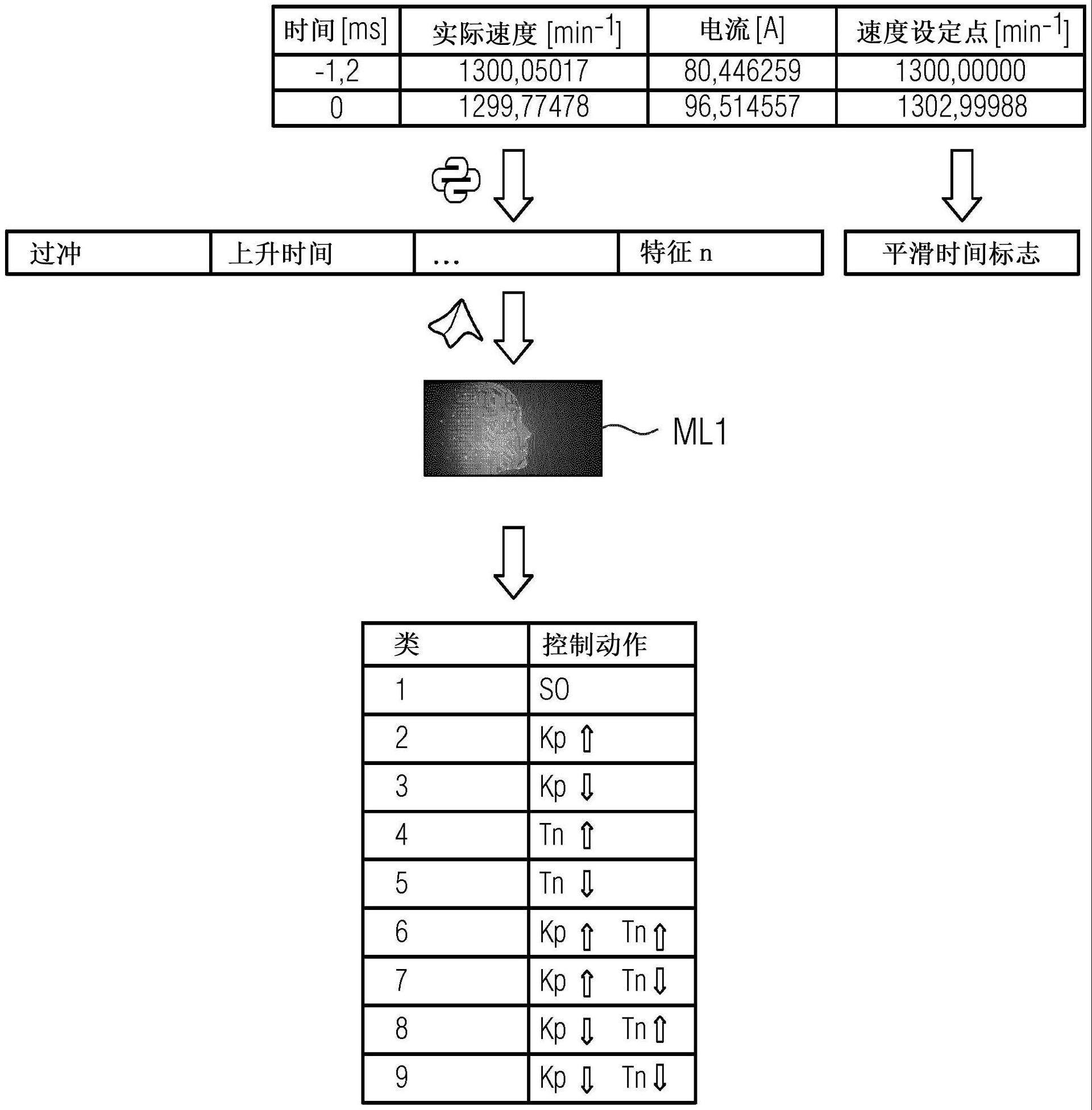
2.根据前述权利要求所述的方法,其中,推断步骤包括确定用于调整所述控制参数(kp,tn)中的一个或多个控制参数的一个或多个控制动作。
3.根据前述权利要求中任一项所述的方法,其中,推断步骤包括从有限数目的控制动作中确定控制动作,其中,控制动作包括:调整所述控制回路的比例部分的系数,kp;或调整所述控制回路的积分部分的积分时间,tn;或调整比例部分的系数和积分部分的积分时间。
4.根据前述权利要求中任一项所述的方法,其中,控制动作包括调整相应的控制参数值的调整因子。
5.根据前述权利要求中任一项所述的方法,其中,所述机器学习模型(ml1,ml2,ml3)是多个不同机器学习模型的组合、优选是一个或多个k最近邻,和/或一个或多个支持向量机,或k最近邻和支持向量机的组合。
6.根据前述权利要求中任一项所述的方法,其中,第一机器学习模型(ml1)、优选k最近邻模型例如针对多个控制动作中的每一个控制动作输出分类,并且第二机器学习模型(ml2)、优选支持向量机(ml2)例如针对多个控制动作中的每一个控制动作输出误差和。
7.根据前述权利要求中任一项所述的方法,其中,首先基于第一机器学习模型(ml1)确定控制动作,并且在确定的调整的情况下,例如控制动作是调整两个或多个控制参数的组合的情况下,基于第二机器学习模型(ml2)确定调整的特定组合,例如控制动作。
8.根据前述权利要求中任一项所述的方法,重复前述权利要求中任一项所述的方法的步骤,直到获得对称最优,so,或获得绝对值最优,
9.一种转换器(1),运行用于执行根据前述权利要求中任一项所述的方法的步骤。
10.一种训练机器学习模型(ml1,ml2,ml3)的方法,所述方法包括以下步骤:基于(虚拟)驱动系统(2)的实际值来训练所述机器学习模型(ml1,ml2,ml3),所述实际值包括实际旋转速度、旋转速度设定点、实际转矩、控制差。
11.根据前述权利要求所述的训练机器学习模型(ml1,ml2,ml3)的方法,所述方法包括:从所述实际值(nist)导出一个或多个特征以用于将所述特征输入到所述机器学习模型(ml1,ml2,ml3)中,所述特征包括以下特征中的一个或多个:所述控制差的相对过冲、所述控制差的上升时间、最大的所述过冲的时刻、达到所述控制差的一半的时间、达到所述控制差的总控制时间。
12.根据前述权利要求所述的训练机器学习模型的方法,所述方法包括向生成的所述特征分配一个或多个标签的步骤,其中,所述标签对应于用于调整控制回路(10)设置的一个或多个控制动作。
13.根据权利要求10至12中任一项所述的训练机器学习模型(ml1,ml2,ml3)的方法,其中,所述机器学习模型包括k最近邻模型(ml1)和/或支持向量机(ml2)。
技术总结
本发明涉及一种优化转换器(1)的控制回路(10)、例如转换器(1)的控制系统(20)的方法,该方法包括以下步骤:获取由该转换器(1)供电的驱动系统(2)的实际值(nist),基于至少一个机器学习模型(ML1,ML2,ML3)和实际值(nist)来推断该控制回路(10)的控制参数(Kp,Tn)的一个或多个调整以用于改进该控制准确度,输出这些调整以用于适配该控制参数(Kp,Tn)值。
技术研发人员:马克西米利安·普菲斯特,本杰明·阿姆舍勒
受保护的技术使用者:西门子股份公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!