使用超控比例-积分-微分(PID)控制器在真空发生系统中提供控制稳定性的方法和系统与流程
本公开总体上涉及用于使用超控比例-积分-微分(pid)控制器在真空发生系统中提供控制稳定性的方法和系统。
背景技术:
1、在小切口手术期间,特别是在眼科手术期间,将小探针插入手术部位以切割、去除或以其他方式操纵组织。在这些手术过程中,流体和组织可能从手术部位被抽吸。
2、流体和组织被抽吸的眼科手术的示例包括玻璃体视网膜手术。玻璃体视网膜手术可以包括被执行用于恢复、保护和增强视力的各种手术。玻璃体视网膜手术可以适用于治疗眼睛后部的许多严重病症。玻璃体视网膜手术可以治疗以下病症:比如年龄相关性黄斑变性(amd)、糖尿病性视网膜病变和糖尿病性玻璃体出血、黄斑裂孔、视网膜脱落、视网膜前膜、cmv视网膜炎、以及许多其他眼科病症。为了治疗眼睛后部的某些病症,医生可能将玻璃体切割术作为正在进行的玻璃体视网膜手术的一部分首先进行。玻璃体切割术是指手术切除玻璃体,玻璃体是眼睛的中心、正常情况下是透明的凝胶状物质。玻璃体可以占眼睛体积的大约三分之二,使其在出生前就具有形态和形状。
3、玻璃体的去除可能涉及玻璃体切割器(也称为“切割器”或“玻璃体切割器”)。在一些示例中,玻璃体切割器可以由包括一个或多个气动阀(又称为驱动阀)的气动玻璃体切除机(例如,“手术控制台”)提供动力。在这样的示例中,玻璃体切割器可以像微型截切机一样工作,带有振荡显微切割器用于以受控的方式去除玻璃体凝胶。在一些其他示例中,玻璃体切割器可以使用激光或比如超声的一些其他技术来切割玻璃体。除了切割玻璃体之外,切割器还可以被配置为抽吸手术切割下来的玻璃体。抽吸可以由真空发生器(例如,文丘里真空)提供,该真空发生器通过提供抽吸通道的管联接到切割器。
4、流体和组织被抽吸的眼科手术的其他示例包括超声乳化术,这是指白内障手术,其中患病的晶状体被乳化并从晶状体囊中吸出。在一些示例中,超声乳化术探针可以通过超声(或其他技术,比如激光等)来打碎晶状体。为了抽吸被打碎的晶状体,超声乳化术探针可以由真空发生器(例如,文丘里真空)提供动力,真空发生器通过提供抽吸通道的管联接到超声乳化术探针。
5、某些现有的真空发生器,比如某些现有的文丘里真空发生器,使用压缩空气流过产生真空压力的孔来操作。然而,这些真空发生器的一个共同特性是,超过一定量的供应压力时,随着供应压力的增加,真空发生器变得效率降低并且产生的真空压力变小。例如,真空压力随着供应空气压力在0-60psig(磅/平方英寸表压)范围内的增加而增加。然而,随着供应空气压力在60-87psig范围内增加,真空压力开始下降。更具体地,当供应空气压力达到例如60psig左右或更高时,真空压力开始下降,从而引起用于调节供应空气压力的标准pid控制器驱动至不稳定。在这样的示例中,当供应空气压力在0-60psig的范围内时,真空发生器可以被称为在单调区域中操作。另一方面,当供应空气压力高于例如60psig时,真空发生器可以被称为在非单调区域或递减区域中操作。虽然在上面的示例中使用了60psig,但应该理解,也可以考虑其他供应空气压力值。
技术实现思路
1、本公开总体上涉及用于使用超控比例-积分-微分(pid)控制器在真空发生系统中提供控制稳定性的方法和系统。
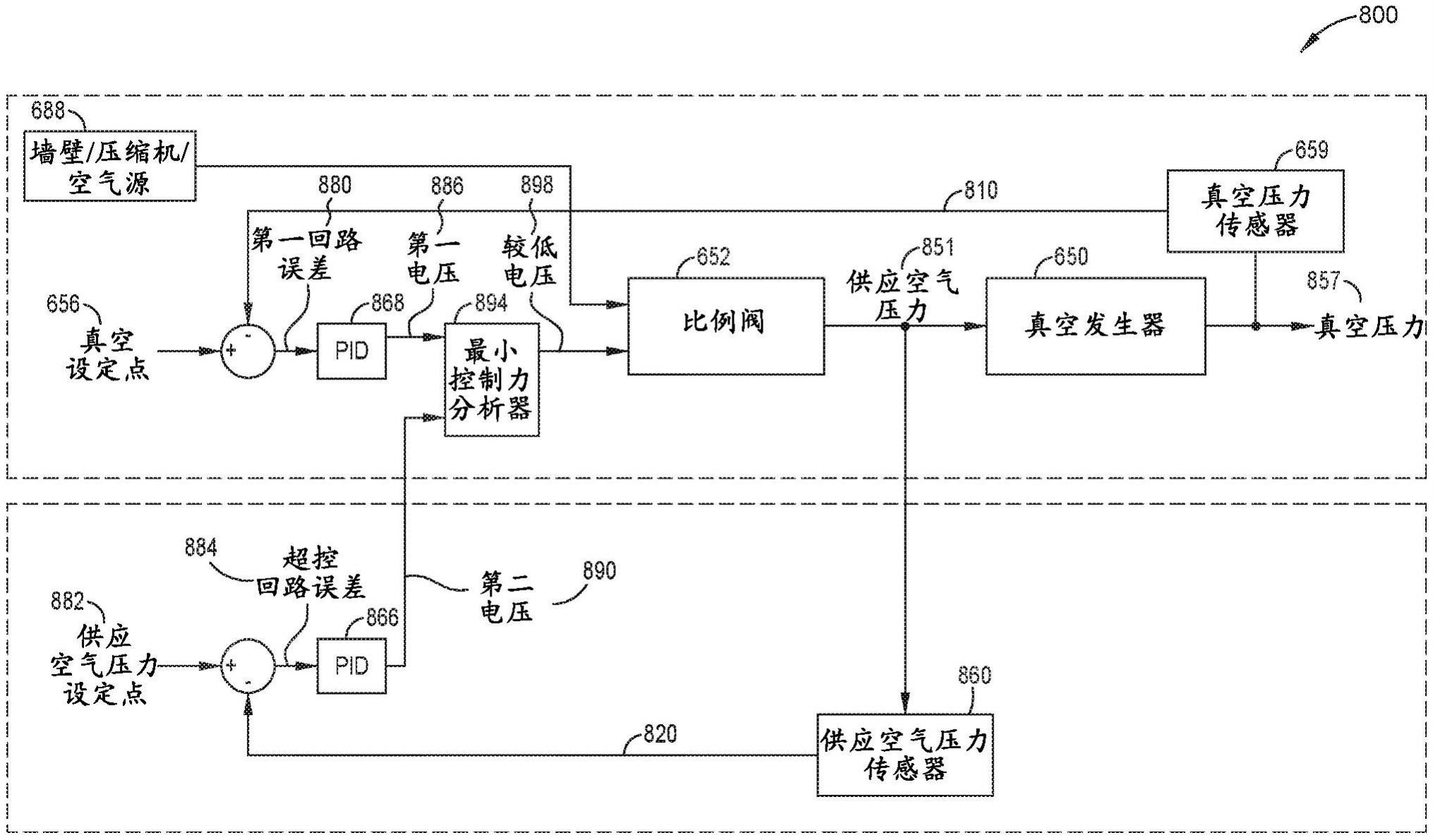
2、某些实施例提供了一种控制真空发生系统中的真空压力的方法。该方法包括接收真空压力传感器的真空压力传感器读数。该方法进一步包括计算真空压力传感器读数与真空压力设定点之间的第一误差。该方法进一步包括基于第一误差计算用于控制比例阀的第一电压水平。该方法进一步包括接收供应空气压力传感器的供应空气压力传感器读数。该方法进一步包括计算空气压力传感器读数与供应空气压力设定点之间的第二误差。该方法进一步包括基于第二误差计算用于控制比例阀的第二电压水平。该方法进一步包括确定第一电压水平和第二电压水平中的较低电压水平。该方法进一步包括向比例阀提供较低电压水平。该方法进一步包括使用比例阀基于较低电压水平向真空发生器提供供应空气压力。该方法进一步包括使用真空发生器向手术工具提供基于供应空气压力的真空压力。
3、某些实施例提供了一种真空发生系统。真空发生系统包括第一比例-积分-微分(pid)控制器,该控制器被配置为接收与真空发生器相关联的真空压力传感器读数与真空压力设定点之间的第一误差,并基于第一误差计算用于控制比例阀的第一电压水平。真空发生系统进一步包括第二pid控制器,该控制器被配置为接收供应空气压力传感器读数与供应空气压力设定点之间的第二误差,并基于第二误差计算第二电压水平。真空发生系统包括确定第一电压水平和第二电压水平中的较低电压水平。真空发生系统进一步包括比例阀,该比例阀被配置为接收较低电压水平,并基于该电压水平使供应空气压力提供给真空发生器。真空发生系统进一步包括真空发生器,该真空发生器被配置为向手术工具提供基于供应空气压力的真空压力。
4、某些实施例提供了一种真空发生系统,该真空发生系统包括:存储器,该存储器包括可执行指令;与存储器进行数据通信并被配置为执行指令的处理器,将处理器配置为:接收与真空发生器相关联的真空压力传感器读数与真空压力设定点之间的第一误差;基于第一误差计算第一电压水平;接收供应空气压力传感器读数与供应空气压力设定点之间的第二误差;基于所述第二误差计算第二电压水平;确定第一电压水平和第二电压水平中的较低电压水平并将较低电压水平提供给比例阀。真空发生系统进一步包括比例阀,该比例阀被配置为基于较低电压水平使供应空气压力提供给真空发生器。真空发生系统进一步包括真空发生器,该真空发生器被配置为向手术工具提供基于供应空气压力的真空压力。
5、以下描述和相关附图详细阐述了一个或多个实施例的某些说明性特征。
技术特征:
1.一种控制真空发生系统中的真空压力的方法,所述方法包括:
2.如权利要求1所述的方法,其中,第一比例-积分-微分pid控制器来计算所述第一电压水平,并且其中,第二pid控制器计算所述第二电压水平。
3.如权利要求2所述的方法,其中,所述第一pid控制器确定第一积分值,并且其中,所述第二pid控制器确定第二积分值,并且其中,所述pid控制器使用所述第一电压水平或第二电压水平中的较低电压水平确定的积分值被提供给所述第一pid控制器和所述第二pid控制器以用作后续电压确定时的积分值。
4.如权利要求1所述的方法,其中,基于所述第二误差计算所述第二电压水平包括将所述供应空气压力设定点限制在对应于所述真空发生器的单调操作范围的范围。
5.如权利要求4所述的方法,其中,所述供应空气压力设定点是恒定的,并且其中,所述供应空气压力设定点被设置为等于所述范围内的最大供应空气压力。
6.如权利要求3所述的方法,其中,所述第一pid控制器是所述真空发生系统的主驱动器并且当所述第一电压水平低于所述第二电压水平时驱动所述真空发生系统。
7.如权利要求6所述的方法,其中,当所述第二电压水平小于所述第一电压水平时,所述第二pid控制器驱动所述真空发生系统。
8.一种真空发生系统,包括:
9.如权利要求8所述的真空发生系统,进一步包括:
10.如权利要求8所述的真空发生系统,其中,当所述供应空气压力等于或超过所述第二pid控制器的供应空气压力设定点时,所述第二pid控制器控制所述比例阀。
11.如权利要求10所述的真空发生系统,其中,所述供应空气压力设定点能够在大约40psig到60psig之间。
12.一种真空发生系统,包括:
13.如权利要求12所述的真空发生系统,进一步包括:
14.如权利要求12所述的真空发生系统,其中,基于所述第二误差计算所述第二电压水平包括将所述供应空气压力设定点限制在对应于所述真空发生器的单调操作范围的范围。
15.如权利要求14所述的真空发生系统,其中,基于所述第二误差计算所述第二电压水平包括将所述供应空气压力设定点限制在0-60psig(计示磅/平方英寸)的范围。
技术总结
某些实施例提供了一种具有超控PID控制器、比例阀和真空发生器的真空发生系统。超控PID控制器允许真空发生系统控制提供给真空发生器的供应空气压力的操作范围。通过控制供应空气压力的操作范围,真空发生系统能够避免进入真空发生器的递减区或非单调区域。
技术研发人员:B·T·切姆
受保护的技术使用者:爱尔康公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!