数值控制系统以及工业机械的控制方法与流程
本公开涉及数值控制系统以及工业机械的控制方法。
背景技术:
1、近年来,为了促进加工现场的自动化,期望一种数值控制系统,能够联动地控制对工件进行加工的机床的动作以及对该机床装卸工件的机器人的动作(例如,参照专利文献1)。一般而言,机床动作由数值控制装置控制,机器人动作由机器人控制装置控制。因此,为了联动地控制机床动作和机器人动作,需要操作数值控制装置和机器人控制装置双方。与之相对地,在专利文献1所示的数值控制系统中,能够按照来自数值控制装置侧的用户指示来选择机器人的动作程序和设定动作程序,由此使用户的设定变得容易。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2018-195055号公报
技术实现思路
1、发明要解决的课题
2、但是,在联动地控制已设的机床和之后设置的机器人时,需要连接控制机床动作的数值控制装置和控制机器人动作的机器人控制装置。此时,还需要对这些数值控制装置和机器人控制装置重新追加i/o信号、m代码等命令,或者重新设置plc(可编程逻辑控制器)这样的外部设备。此时,由于还需要将i/o信号经由数值控制装置的梯形电路发送到机器人控制装置,所以也需要编辑已设的梯形电路。因此,在实际的加工现场中,有时无法灵活地应对。
3、本公开是鉴于上述课题而完成的,提供一种能够容易地使机床与机器人联动的数值控制系统以及工业机械的控制方法。
4、用于解决课题的手段
5、本公开的一方式提供一种数值控制系统,其联动地控制机床和机器人的动作,其具有:数值控制装置,其具有根据数值控制程序来控制所述机床的动作的第一控制部;机器人控制装置,其具有根据机器人控制程序来控制所述机器人的动作的第二控制部;以及存储装置,其存储能够由所述第一控制部和所述第二控制部读写的变量的值,所述第一控制部读出所述存储装置中存储的变量的值,并根据该读出的变量的值来控制所述机床的动作,所述第二控制部读出所述存储装置中存储的变量的值,并根据该读出的变量的值来控制所述机器人的动作。
6、本公开的一方式提供一种工业机械的控制方法,其使用数值控制系统来联动地控制机床和机器人的动作,所述数值控制系统具有:第一控制部,其根据数值控制程序来控制所述机床的动作;第二控制部,其根据机器人控制程序来控制所述机器人的动作;以及存储装置,其存储能够由所述第一控制部和所述第二控制部读写的变量的值,所述工业机械的控制方法具有以下工序:所述第一控制部读出所述存储装置中存储的变量的值,并根据该读出的变量的值来控制所述机床的动作;以及所述第二控制部读出所述存储装置中存储的变量的值,并根据该读出的变量的值来控制所述机器人的动作。
7、发明效果
8、在本公开的一方式中,数值控制系统具有:第一控制部,其根据数值控制程序来控制机床的动作;第二控制部,其根据机器人控制程序来控制机器人的动作;存储装置,其存储能够从这些第一控制部和第二控制部两者读写的变量的值。第一控制部从第二控制部读出能够改写的变量值,根据该读出的变量值来控制机床的动作,第二控制部从第一控制部读出能够改写的变量值,根据该读出的变量值来控制机器人的动作。根据本公开的一方式,能够经由可从双方读写的变量来进行从第一控制部向第二控制部的通知和请求、从第二控制部向第一控制部的通知和请求等,因此,能够不用新追加i/o信号和外部设备、或者不用编辑已设的梯形电路,就能够容易地使机床与机器人联动。另外,根据本公开的一方式,仅通过使存储装置存储各种变量的值,也能够应对多样的自动化方式。
技术特征:
1.一种数值控制系统,其联动地控制机床和机器人的动作,其特征在于,
2.根据权利要求1所述的数值控制程序,其特征在于,
3.根据权利要求1或2所述的数值控制系统,其特征在于,
4.根据权利要求1~3中任一项所述的数值控制系统,其特征在于,
5.根据权利要求1~4中任一项所述的数值控制系统,其特征在于,
6.根据权利要求1~4中任一项所述的数值控制系统,其特征在于,
7.根据权利要求1~4中任一项所述的数值控制系统,其特征在于,
8.一种工业机械的控制方法,其使用数值控制系统来联动地控制机床和机器人的动作,其特征在于,
9.根据权利要求8所述的工业机械的控制方法,其特征在于,
技术总结
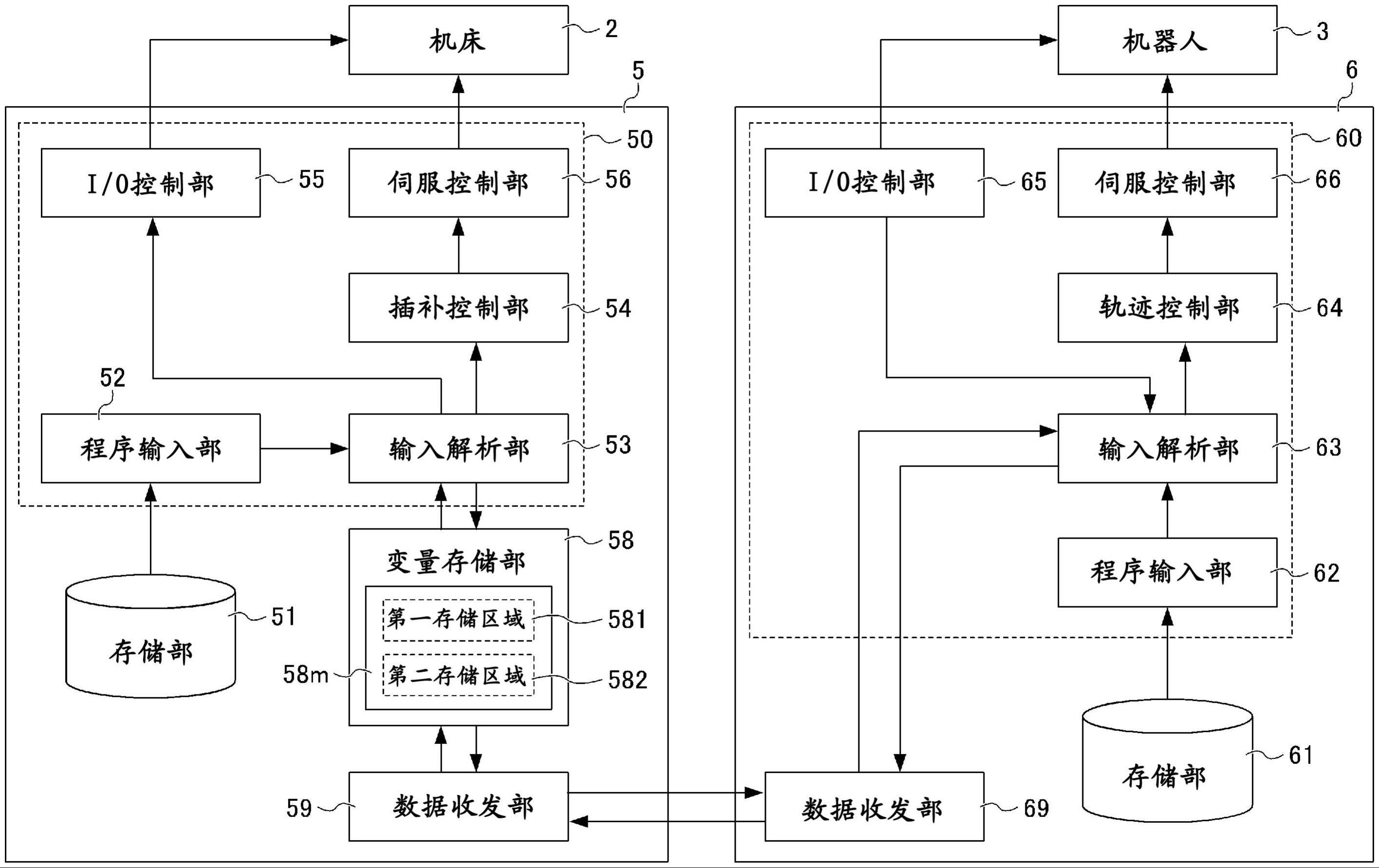
一种数值控制系统(1),具有:具有机床控制模块(50)的数值控制装置(5)、具有控制机器人(3)的动作的机器人控制模块(60)的机器人控制装置(6)、以及存储能够由两个模块(50、60)读写的多个变量的值的变量存储部(58)。机床控制模块(50)读出存储在变量存储部(58)的第二存储区域(582)中的第二变量的值,根据读出的值控制机床(2)的动作,并且改写存储在第一存储区域(581)中的第一变量的值,机器人控制模块(60)读出第一变量的值,根据读出的第一变量的值控制机器人(3)的动作,并且改写第二变量的值。
技术研发人员:今西一刚
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!