一种电动舵机容错控制方法
1.本发明涉及电动舵机协同控制领域,具体而言,涉及一种电舵机容错控制方法。
背景技术:
2.电动舵机系统是一个高精度的位置伺服系统,是当代船舶、舰艇、潜艇极为重要的组成部分,是控制系统重要的执行机构。舵机长时间工作在水下复杂环境和高强度条件中,其性能易受到不良影响或难以避免的存在故障及安全隐患,因此需要一种针对电动舵机的容错控制技术。
技术实现要素:
3.本发明的目的是提出了一种电动舵机容错控制方法,可以大大提高现有无人潜航器舵机伺服系统的有效性,从而最大限度保存潜航器生命力,具有重要的战场应用价值。
4.为实现上述技术目的,本发明采用的技术方案如下:
5.一种电动舵机容错控制方法,其特征在于,包括以下步骤:
6.step 1.根据极性定义,控制系统生成的俯仰、偏航、滚转三通道控制指令与“x”型布局的4片舵指令的转换关系为:
[0007][0008]
其中,δ
x
、δy、δz分别为滚转、偏航和俯仰控制指令;δ1、δ2、δ3、δ4分别为4片舵机控制指令;
[0009]
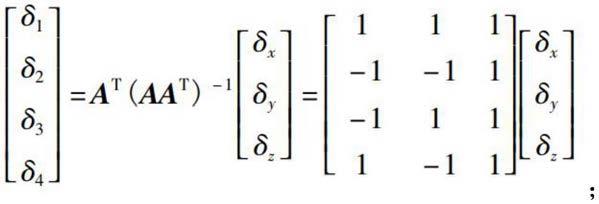
step 2.采用moore-penrose伪逆法,求得舵机控制指令的最小范数解,得到如下分配律公式:
[0010][0011]
step 3.实时采集舵反馈,与理论计算的舵偏比较,在线进行舵机故障检测;若舵机工作正常,则所述分配律公式进行舵指令分解;
[0012]
step 4.当检测到舵机1舵卡死时,则按如下容错控制算法进行舵指令分配:
[0013][0014]
step 5.当检测到舵机1舵、2舵卡死时,则按如下容错控制算法进行舵指令分配:
[0015][0016]
式中,k1,k2为经验系数,满足k1+k2=1。
附图说明
[0017]
图1为舵偏角正向偏转示意图。
具体实施方式
[0018]
为了使本领域的技术人员可以更好地理解本发明,下面结合实施例对本发明技术方案进一步说明。
[0019]
本实施例以“x”型布局的舵为研究对象,控制系统生成俯仰、偏航、滚转三通道控制指令,并按一定的分配关系转换为4片舵机的舵指令,舵面偏转实现潜航器三轴姿态控制。如图1所示,从尾部向前看,4片舵机后缘向上偏转为正,产生正的控制指令。本实施例的电动舵机的容错控制方法,包括以下步骤:
[0020]
step1.根据极性定义,俯仰、偏航、滚转三通道控制指令与4片舵指令的转换关系为:
[0021][0022]
其中,δ
x
、δy、δz分别为滚转、偏航和俯仰控制指令,δ1、δ2、δ3、δ4分别为4片舵机控制指令;
[0023]
step2.根据上述方程特点,获得三通道控制指令后,4片舵指令可有无穷多种组合。因此,采用moore-penrose伪逆法,求得其最小范数解,即:
[0024][0025]
step3.容错控制策略基本思想为:实时采集舵反馈,与理论计算的舵偏比较,在线进行舵机故障检测。若舵机工作正常,则按式(2)分配律进行舵指令分解,若舵机出现故障,则按以下容错控制算法进行舵指令分配,补偿故障舵偏引起的干扰力矩,从而维持潜航器正常航行。
[0026]
当1舵卡死时,以故障舵偏为约束,则有
[0027][0028]
由于det(a1)≠0,对式(3)求逆可得:
[0029][0030]
结合式(2),由式(4)得到容错控制算法如式(5):
[0031][0032]
其他舵机中任意一片出现故障时,同理可得类似结果。观察式(5)可知,当1片舵机出现故障时,新的分配律保持故障舵机指令不变,同时将故障舵机产生的干扰分解到其他3个正常舵机上。将式(5)代入式(1),易知:
[0033][0034]
按上述容错控制算法分配的舵指令执行,故障舵机给三通道等效舵偏产生的干扰力矩消失,潜航器综合控制效果保持不变,可继续正常保持航行。
[0035]
step4.当1舵、2舵两片舵机卡死时,进行容错控制算法设计。由于未知数数量少于约束条件数量,此时方程已无解,即仅靠两片舵机工作无法完成三通道控制,因此只能对约束条件进行取舍。暂不考虑滚转通道控制,以故障舵偏为约束,则有:
[0036][0037]
通过求逆可得:
[0038][0039]
同理暂不考虑偏航通道控制,以故障舵偏为约束,可得:
[0040][0041]
综合考虑控制性能,结合式(8)和式(9),可得1舵、2舵卡死时的容错控制算法为:
[0042][0043]
式中,k1,k2为经验系数,满足k1+k2=1。当其他舵机中任意2片出现故障时,同理可得类似结果。新的分配律保持故障舵机指令不变,同时将故障舵机产生的干扰分解到其他3个正常舵机上。将式(10)代入式(1),易知:
[0044][0045]
按上述容错控制算法分配的舵指令执行,补偿了故障舵机在俯仰通道产生的干扰力矩,而滚转和偏航通道存在一定干扰。由于俯仰通道控制效果保持不变,依然可控制潜航器接近原轨迹航行。
[0046]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种电动舵机容错控制方法,其特征在于,包括以下步骤:step 1.定义控制系统生成的俯仰、偏航、滚转三通道控制指令与“x”型布局的4片舵指令的转换关系为:其中,δ
x
、δ
y
、δ
z
分别为滚转、偏航和俯仰控制指令;δ1、δ2、δ3、δ4分别为4片舵机控制指令;step 2.采用moore-penrose伪逆法,求得舵机控制指令的最小范数解,得到如下分配律公式:step 3.实时采集舵反馈,与理论计算的舵偏比较,在线进行舵机故障检测;若舵机工作正常,则所述分配律公式进行舵指令分解;step 4.当检测到舵机1舵卡死时,则按如下容错控制算法进行舵指令分配:当检测到舵机2舵卡死时,则按如下容错控制算法进行舵指令分配:当检测到舵机3舵卡死时,则按如下容错控制算法进行舵指令分配:当检测到舵机4舵卡死时,则按如下容错控制算法进行舵指令分配:
2.根据权利要求1所述的电动舵机容错控制方法,其特征在于:当检测到舵机1舵、2舵卡死时,则按如下容错控制算法进行舵指令分配:式中,k1,k2为经验系数,满足k1+k2=1。3.根据权利要求1所述的电动舵机容错控制方法,其特征在于:当检测到舵机2舵、3舵卡死时,则按如下容错控制算法进行舵指令分配:式中,k1,k2为经验系数,满足k1+k2=1。4.根据权利要求1所述的电动舵机容错控制方法,其特征在于:当检测到舵机3舵、4舵卡死时,则按如下容错控制算法进行舵指令分配:式中,k1,k2为经验系数,满足k1+k2=1。
技术总结
本发明公开了一种电动舵机容错控制方法,该方法实时采集舵反馈,与理论计算的舵偏比较,在线进行舵机故障检测,若舵机工作正常,则按三通道控制指令与4片舵指令的转换关系分配律进行舵指令分解,若舵机出现故障,则按容错控制算法进行舵指令分配,补偿故障舵偏引起的干扰力矩,从而维持潜航器正常航行。从而维持潜航器正常航行。从而维持潜航器正常航行。
技术研发人员:柏龙 孙园喜 陈晓红 李宇豪
受保护的技术使用者:重庆大学
技术研发日:2022.01.26
技术公布日:2022/5/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1