本申请涉及机器人,尤其涉及一种机器人路径规划方法、电子设备及计算机可读存储介质。
背景技术:
1、现有机器人获得路径信息一般依靠自身的传感器,例如机器人集成有红外线传感器,或者超声波传感器,或者摄像头等进行路径规划。机器人可以借助传感器避免与障碍物发生防撞,降低盲目行走的可能性,但对于陌生环境无法较好地进行全局规划路径,路径规划算法也无法有效预先工作环境的信息,因此现有机器人存在障碍物信息量不足与优化提升有限的问题。
2、现有做法一般是让机器人先进行一次陌生环境的路径行走纪录,为下一次路径规划作参考。但是如果环境中新增加了障碍物,路径规划算法无法有效地得到最佳路径,机器人也容易受到新增加的障碍物影响而无法避开障碍物。再者,集成在机器人上的红外线传感器可能会受到有太阳光或者其他灯光干扰,超声波传感器可能存在室内绕射干扰,容易产生障碍物距离的误判。若机器人借助摄像头等进行路径规划,集成在机器人上的二维摄像头存在无法获取障碍物的立体位置信息的问题,三维摄像头虽然可以获取深度信息,但是深度信息有着处理信息量大的问题,增加了机器人的运算负担,单纯只依靠机器人自身采集的视觉信息,在路径规划处理上存在着诸多的不确定性。
技术实现思路
1、有鉴于此,有必要提供一种机器人路径规划方法、电子设备及计算机可读存储介质,其基于机器人采集的环境信息及机器人移动区域内的其他电子设备采集的环境信息进行路径规划,可提升路径规划的效率与准确性。
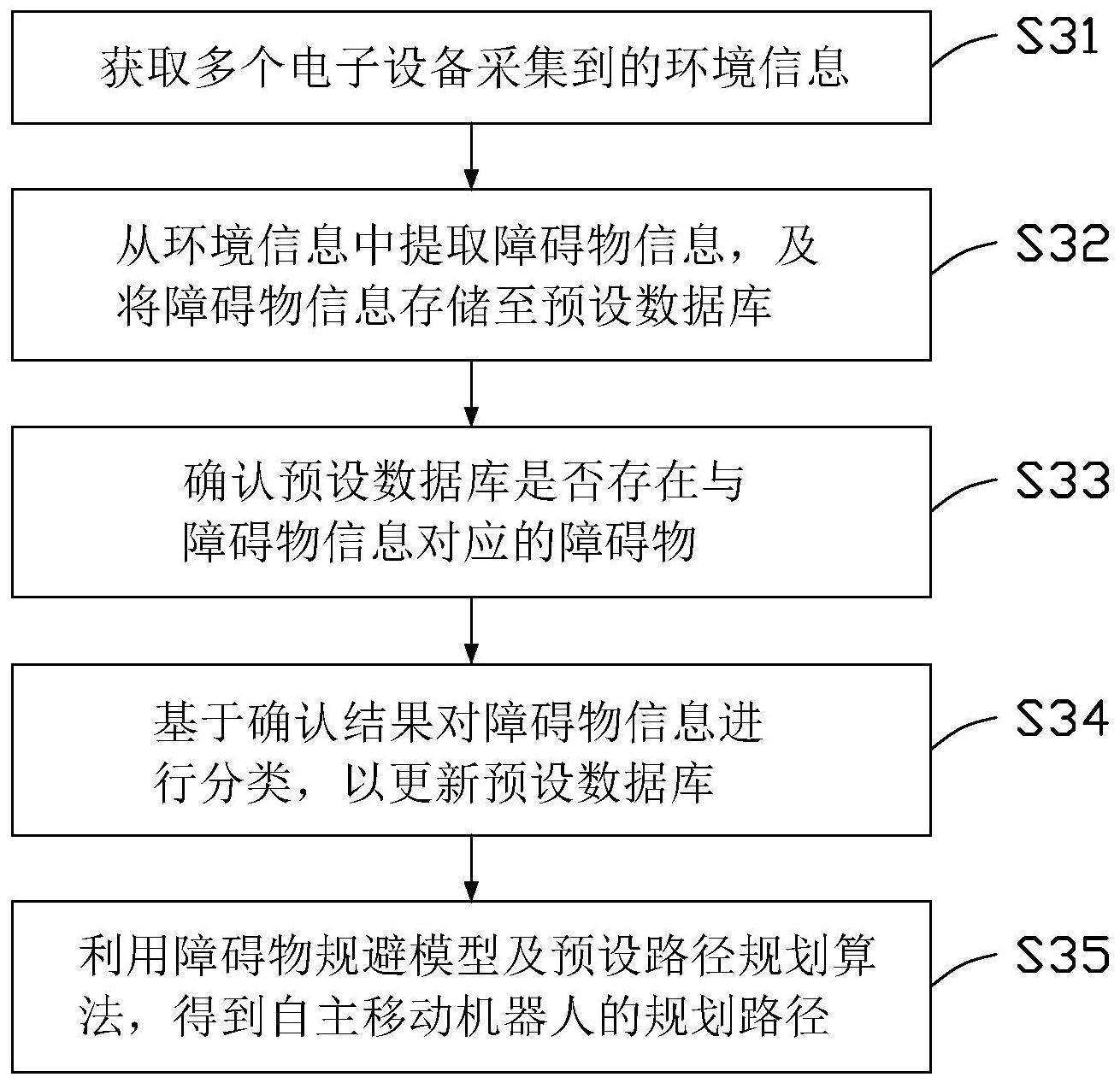
2、本申请一实施方式提供一种机器人路径规划方法,所述方法包括:获取多个电子设备采集到的环境信息,其中多个电子设备包括自主移动机器人及非机器人设备;从环境信息中提取障碍物信息,及将障碍物信息存储至预设数据库;确认预设数据库是否存在与障碍物信息对应的障碍物;基于确认结果对障碍物信息进行分类,以更新预设数据库;
3、基于更新的预设数据库训练障碍物规避模型;利用障碍物规避模型及预设路径规划算法,得到自主移动机器人的规划路径。
4、在一些实施例中,环境信息包括环境影像,从环境信息中提取障碍物信息,包括:对环境影像进行预处理,预处理包括影像筛选和/或影像参数处理;当确定预处理后的环境影像包括可辨识的障碍物时,将环境影像作为障碍物信息。
5、在一些实施例中,基于确认结果对障碍物信息进行分类,以更新预设数据库,包括:当预设数据库存在与障碍物信息对应的障碍物时,识别环境影像中的障碍物名称及障碍物位置信息,及基于障碍物名称将障碍物位置信息更新至预设数据库;当预设数据库不存在与障碍物信息对应的障碍物时,将环境影像中的障碍物分类为未知障碍物,及将未知障碍物的位置信息更新至预设数据库。
6、在一些实施例中,环境信息包括障碍物测距数据,从环境信息中提取障碍物信息,包括:基于障碍物测距数据计算得到障碍物坐标;当障碍物坐标位于预设区域内时,将障碍物坐标作为障碍物信息。
7、在一些实施例中,基于确认结果对障碍物信息进行分类,以更新预设数据库,包括:当预设数据库存在与障碍物信息对应的障碍物时,将障碍物坐标与障碍物关联的数据进行整合,以更新预设数据库;当预设数据库不存在与障碍物信息对应的障碍物时,将与障碍物信息对应的障碍物分类为未知障碍物,及将未知障碍物的障碍物坐标更新至预设数据库。
8、在一些实施例中,预设路径规划算法包括遍历路径规划算法,利用障碍物规避模型及预设路径规划算法,得到自主移动机器人的规划路径,包括:利用障碍物规避模型预测所述自主移动机器人在多种移动路径上与所述障碍物发生碰撞的概率;基于遍历路径规划算法及障碍物规避模型的预测结果,得到自主移动机器人的遍历路径。
9、在一些实施例中,机器人路径规划方法还包括:将规划路径发送至自主移动机器人,以使得自主移动机器人基于规划路径进行移动。
10、在一些实施例中,预设路径规划算法包括遍历路径规划算法,环境信息包括障碍物测距数据及环境影像,障碍物规避模型包括第一障碍物规避模型及第二障碍物规避模型,所述利用所述障碍物规避模型及预设路径规划算法,得到所述自主移动机器人的规划路径,包括:利用基于所述障碍物测距数据训练得到的第一障碍物规避模型预测所述自主移动机器人在多种移动路径上与所述障碍物发生碰撞的概率;利用基于所述环境影像训练得到的第二障碍物规避模型预测所述自主移动机器人在所述多种移动路径上与所述障碍物发生碰撞的概率;基于所述遍历路径规划算法、所述第一障碍物规避模型的预测结果及所述第二障碍物规避模型的预测结果,得到所述自主移动机器人的遍历路径。
11、本申请一实施方式还提供一种电子设备,所述电子设备包括处理器及存储器,所述存储器用于存储指令,所述处理器用于调用所述存储器中的指令,使得所述电子设备执行上述的机器人路径规划方法。
12、本申请一实施方式还一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,当所述计算机指令在电子设备上运行时,使得所述电子设备执行上述的机器人路径规划方法。
13、与现有技术相比,上述机器人路径规划方法、电子设备及计算机可读存储介质,可以将人工智能边缘运算应用在自主移动机器人的路径选择与障碍物规避上,可以有效地提升路径规划效率,障碍物的碰撞机率也能大幅减少,并且综合机器人自身的障碍物感测机制及第三方的障碍物感测机制进行机器人路径规划,可以解决机器人自身观察障碍物不全面与无全局观的路径规划瓶颈,提升路径规划效率与准确性。
技术特征:1.一种机器人路径规划方法,其特征在于,所述方法包括:
2.如权利要求1所述的机器人路径规划方法,其特征在于,所述环境信息包括环境影像,所述从所述环境信息中提取障碍物信息,包括:
3.如权利要求2所述的机器人路径规划方法,其特征在于,所述基于确认结果对所述障碍物信息进行分类,以更新所述预设数据库,包括:
4.如权利要求1所述的机器人路径规划方法,其特征在于,所述环境信息包括障碍物测距数据,所述从所述环境信息中提取障碍物信息,包括:
5.如权利要求4所述的机器人路径规划方法,其特征在于,所述基于确认结果对所述障碍物信息进行分类,以更新所述预设数据库,包括:
6.如权利要求1所述的机器人路径规划方法,其特征在于,所述预设路径规划算法包括遍历路径规划算法,所述利用所述障碍物规避模型及预设路径规划算法,得到所述自主移动机器人的规划路径,包括:
7.如权利要求1所述的机器人路径规划方法,其特征在于,还包括:
8.如权利要求1所述的机器人路径规划方法,其特征在于,所述预设路径规划算法包括遍历路径规划算法,所述环境信息包括障碍物测距数据及环境影像,所述障碍物规避模型包括第一障碍物规避模型及第二障碍物规避模型,所述利用所述障碍物规避模型及预设路径规划算法,得到所述自主移动机器人的规划路径,包括:
9.一种电子设备,所述电子设备包括处理器及存储器,其特征在于,所述存储器用于存储指令,所述处理器用于调用所述存储器中的指令,使得所述电子设备执行如权利要求1至权利要求8中任一项所述的机器人路径规划方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机指令,当所述计算机指令在电子设备上运行时,使得所述电子设备执行如权利要求1至权利要求8中任一项所述的机器人路径规划方法。
技术总结一种机器人路径规划方法、电子设备及计算机可读存储介质,所述方法包括:获取多个电子设备采集到的环境信息,其中多个电子设备包括自主移动机器人及非机器人设备;从环境信息中提取障碍物信息,及将障碍物信息存储至预设数据库;确认预设数据库是否存在与障碍物信息对应的障碍物;基于确认结果对障碍物信息进行分类,以更新预设数据库;基于更新的预设数据库训练障碍物规避模型;利用障碍物规避模型及预设路径规划算法,得到自主移动机器人的规划路径。本申请涉及机器人技术领域,综合机器人自身的障碍物感测机制及第三方的障碍物感测机制进行机器人路径规划,可有效提升路径规划的效率与准确性。
技术研发人员:张圻毓
受保护的技术使用者:鸿富锦精密工业(武汉)有限公司
技术研发日:技术公布日:2024/1/15