磁浮平台安全停车方法、装置、控制设备及安全停车系统与流程
本发明涉及磁浮控制,尤其涉及一种磁浮平台安全停车方法、装置、控制设备及安全停车系统。
背景技术:
1、磁浮平台运用电磁悬浮技术,具有稳定可控、静音、零摩擦等显著特点,常用于高精度的运动设备中,随之而来的是对硬件精度要求的升高和硬件成本的增加。为了避免正常工作或调试过程发生故障而导致硬件损伤,通常会从结构、硬件、软件等不同方面设计限位或其他保护措施,以减少硬件损坏带来的精度损失、降低维护成本。
2、现有技术提供了一种针对光刻机工件台的运动控制,采用迭代精密控制系统进一步增强双运动台的协同工作精度,增加了系统鲁棒性。然而,该现有技术着重于如何实现或提高正常工作状态下双工件台的协同运动精度、增加鲁棒性以及减少故障率,但是故障是不可能百分百避免的,例如,调试过程中由于参数还未优化导致工件台经常出现开环控制停机,运行过程中外部因素如停电、停水、人为操作失误等导致的停机,工件台内部硬件故障或者误差累积超差等因素导致停机等。
3、现有技术中,当遭遇故障时为防止整套系统进一步损坏,通常会采取紧急停电停机措施。由于磁浮平台是悬浮在底座表面的,突然停电会使工件台自由落体至底座表面,巨大的冲击力会砸伤底座表面。如果工件台正在运行过程中,最大速度可达1~3米每秒,磁浮平台与底座接触会使底面刮擦损坏。这对于高精度的磁浮平台而言表面出现损伤导致凹凸不平会严重破坏运动精度,影响故障修复后的重启工作。
4、因此,针对磁浮平台运动过程中发生异常的情况,有必要提供了一种安全停车方案,以延长硬件使用寿命,降低维护成本。
技术实现思路
1、本发明要解决的技术问题是:针对磁浮平台运动过程中发生异常的情况,有必要提供一种安全停车方案,以延长硬件使用寿命,降低维护成本。
2、为解决上述技术问题,本发明提供了一种磁浮平台安全停车方法,包括:
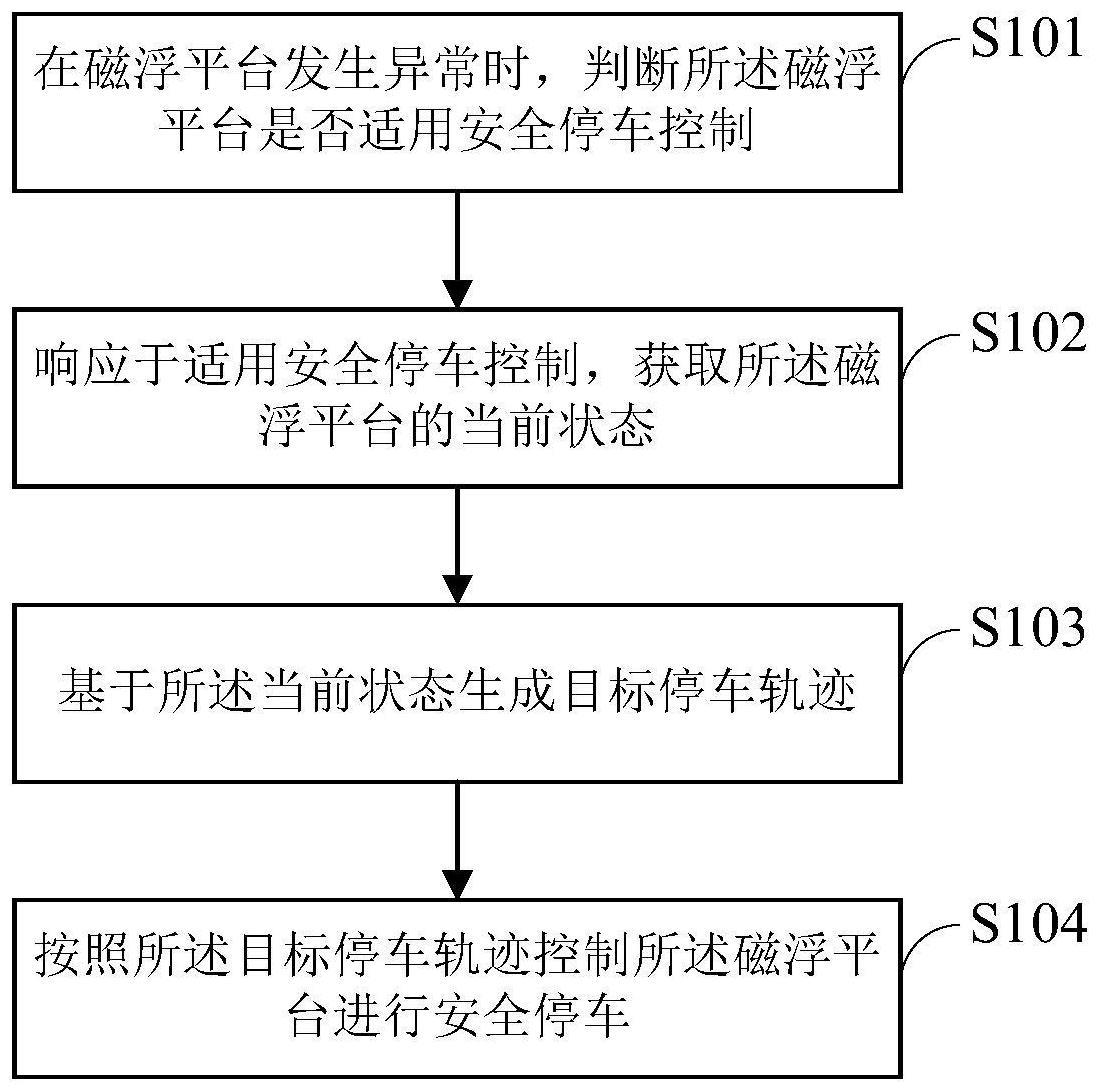
3、在磁浮平台发生异常时,判断所述磁浮平台是否适用安全停车控制;
4、响应于适用安全停车控制,获取所述磁浮平台的当前状态;
5、基于所述当前状态生成目标停车轨迹;
6、按照所述目标停车轨迹控制所述磁浮平台进行安全停车。
7、可选地,所述判断磁浮平台是否适用安全停车控制,包括:
8、获取所述磁浮平台上报的错误码;
9、基于所述错误码判断磁浮平台是否适用安全停车控制。
10、可选地,所述获取所述磁浮平台上报的错误码,包括:
11、水气异常错误码、温度异常错误码、速度超限错误码、高度超限错误码、位移超限错误码、误差超差错误码、过流过压错误码。
12、可选地,所述判断磁浮平台是否适用安全停车控制之前,还包括:
13、接收到用户输入的指令代码时检测是否符合运行条件;
14、若不符合所述运行条件,则自动提示错误码,且不输出执行代码。
15、可选地,所述获取所述磁浮平台的当前状态,包括:
16、获取利用传感器收集的所述磁浮平台的姿态信息和运动参数,所述运动参数至少包括速度和加速度。
17、可选地,所述基于所述当前状态生成目标停车轨迹,包括:
18、根据所述姿态信息和运动参数生成目标停车轨迹。
19、可选地,所述根据所述姿态信息和运动参数生成目标停车轨迹,包括:
20、按照固定时长,或固定位移,或固定加速度,或固定加加速度,或固定加加加速度的方式生成目标停车轨迹。
21、为解决上述技术问题,本发明提供了一种磁浮平台安全停车装置,包括:
22、停车判断模块,用于在磁浮平台发生异常时,判断所述磁浮平台是否适用安全停车控制;
23、状态获取模块,用于响应于适用安全停车控制,获取所述磁浮平台的当前状态;
24、轨迹生成模块,用于基于所述当前状态生成目标停车轨迹;
25、停车控制模块,用于按照所述目标停车轨迹控制所述磁浮平台进行安全停车。
26、可选地,所述停车判断模块,具体用于获取所述磁浮平台上报的错误码;基于所述错误码判断磁浮平台是否适用安全停车控制。
27、可选地,所述停车判断模块,具体用于获取所述磁浮平台上报的水气异常错误码、温度异常错误码、速度超限错误码、高度超限错误码、位移超限错误码、误差超差错误码、过流过压错误码。
28、可选地,还包括运行条件检测模块,用于在所述停车判断模块判断磁浮平台是否适用安全停车控制之前,接收到用户输入的指令代码时检测是否符合运行条件;若不符合所述运行条件,则自动提示错误码,且不输出执行代码。
29、可选地,所述状态获取模块,具体用于获取利用传感器收集的所述磁浮平台的姿态信息和运动参数,所述运动参数至少包括、速度、加速度。
30、可选地,所述轨迹生成模块,具体用于根据所述姿态信息和运动参数生成目标停车轨迹。
31、可选地,所述轨迹生成模块,具体用于按照固定时长,或固定位移,或固定加速度,或固定加加速度,或固定加加加速度的方式生成目标停车轨迹。
32、为解决上述技术问题,本发明提供了一种控制设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述方法。
33、为解决上述技术问题,本发明提供了一种安全停车系统,包括运动平台和上述控制设备。
34、可选地,所述运动平台在工作状态时为浮起状态,所述运动平台与底座平台间通过磁力连接,且在通电情况下所述运动平台在所述底座平台上进行单自由度运动或多自由度运动。
35、可选地,所述运动平台为光刻机工件台。
36、为解决上述技术问题,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述方法。
37、与现有技术相比,上述方案中的一个或多个实施例可以具有如下优点或有益效果:
38、应用本发明的一种磁浮平台安全停车方法、装置、控制设备及安全停车系统,判断磁浮平台是否适用安全停车控制;响应于适用安全停车控制,获取所述磁浮平台的当前状态;基于所述当前状态生成目标停车轨迹;按照所述目标停车轨迹控制所述磁浮平台进行安全停车。由此可见,本发明检测到报错后,在不会对其他部件产生更严重破坏的情况下平滑安全停下运动平台,减少对磁浮平台硬件设备的损伤,能够解决现有保护措施中检测到报错后直接断开电机使能,控制程序失去对平台控制而自由落体,使得平台依靠自身重力和与底座面的摩擦力来停车的弊端,尤其是解决了在浮起高度过高时容易产生大冲击碰撞,在高速运动时突然降下平台会剐蹭表面,造成物理性破坏的问题。
技术特征:
1.一种磁浮平台安全停车方法,其特征在于,包括:
2.根据权利要求1所述的磁浮平台安全停车方法,其特征在于,所述判断磁浮平台是否适用安全停车控制,包括:
3.根据权利要求2所述的磁浮平台安全停车方法,其特征在于,所述获取所述磁浮平台上报的错误码,包括:
4.根据权利要求1所述的磁浮平台安全停车方法,其特征在于,所述判断磁浮平台是否适用安全停车控制之前,还包括:
5.根据权利要求1所述的磁浮平台安全停车方法,其特征在于,所述获取所述磁浮平台的当前状态,包括:
6.根据权利要求5所述的磁浮平台安全停车方法,其特征在于,所述基于所述当前状态生成目标停车轨迹,包括:
7.根据权利要求6所述的磁浮平台安全停车方法,其特征在于,所述根据所述姿态信息和运动参数生成目标停车轨迹,包括:
8.一种磁浮平台安全停车装置,其特征在于,包括:
9.一种控制设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的方法。
10.一种安全停车系统,其特征在于,包括运动平台和权利要求9所述的控制设备。
11.根据权利要求10所述的安全停车系统,其特征在于,所述运动平台在工作状态时为浮起状态,所述运动平台与底座平台间通过磁力连接,且在通电情况下所述运动平台在所述底座平台上进行单自由度运动或多自由度运动。
12.根据权利要求10所述的安全停车系统,其特征在于,所述运动平台为光刻机工件台。
13.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1至7中任一项所述的方法。
技术总结
本发明公开了一种磁浮平台安全停车方法、装置、控制设备及安全停车系统,该方法包括:在磁浮平台发生异常时,判断磁浮平台是否适用安全停车控制;响应于适用安全停车控制,获取磁浮平台的当前状态;基于当前状态生成目标停车轨迹;按照目标停车轨迹控制所述磁浮平台进行安全停车。本发明检测到报错后,在不会对其他部件产生更严重破坏的情况下平滑安全停下运动平台,减少对磁浮平台硬件设备的损伤,解决了现有保护措施中检测到报错后直接断开电机使能,控制程序失去对平台控制而自由落体,使得平台依靠自身重力和与底座面的摩擦力来停车的弊端,尤其是在浮起高度过高时产生大冲击碰撞,在高速运动时突然降下平台会剐蹭表面造成物理性破坏的问题。
技术研发人员:居佳运,董旭辉
受保护的技术使用者:北京华卓精科科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!