构建机器人的控制器的方法和机器人与流程
本发明涉及人工智能及机器人领域,更具体地涉及一种构建机器人的控制器的方法、机器人、非暂时性计算机可读介质以及一种控制机器人的方法。
背景技术:
1、随着人工智能及机器人技术在民用和商用领域的广泛应用,基于人工智能及机器人技术的机器人在智能交通、智能家居等领域起到日益重要的作用,也面临着更高的要求。
2、当前对机器人,特别是欠驱动机器人进行运动控制时,通常需要设计与机器人机械结构精确对应的动力学模型,然后基于该动力学模型在行进过程中的变化来确定机器人各个关节处的控制力,以保证机器人的运动过程中的平衡。然而,由于机器人的机械结构复杂,尤其是某些轮腿式机器人,即使在知晓机器人的机械结构的情况下也很难得出准确的动力学模型。此外,即使动力学模型已知,但在一些情况下难以准确地进行动力学模型中的参数辨识。如果动力学模型的参数虽然已知但不准确,也会造成机器人的控制器效果不理想。为此需要提出一种能够对机器人进行灵活控制的方案。
技术实现思路
1、针对以上问题,本公开提供了一种构建机器人的控制器的方法、机器人、非暂时性计算机可读介质以及一种控制机器人的方法。能够自适应地获取能够对机器人进行灵活控制的控制器。
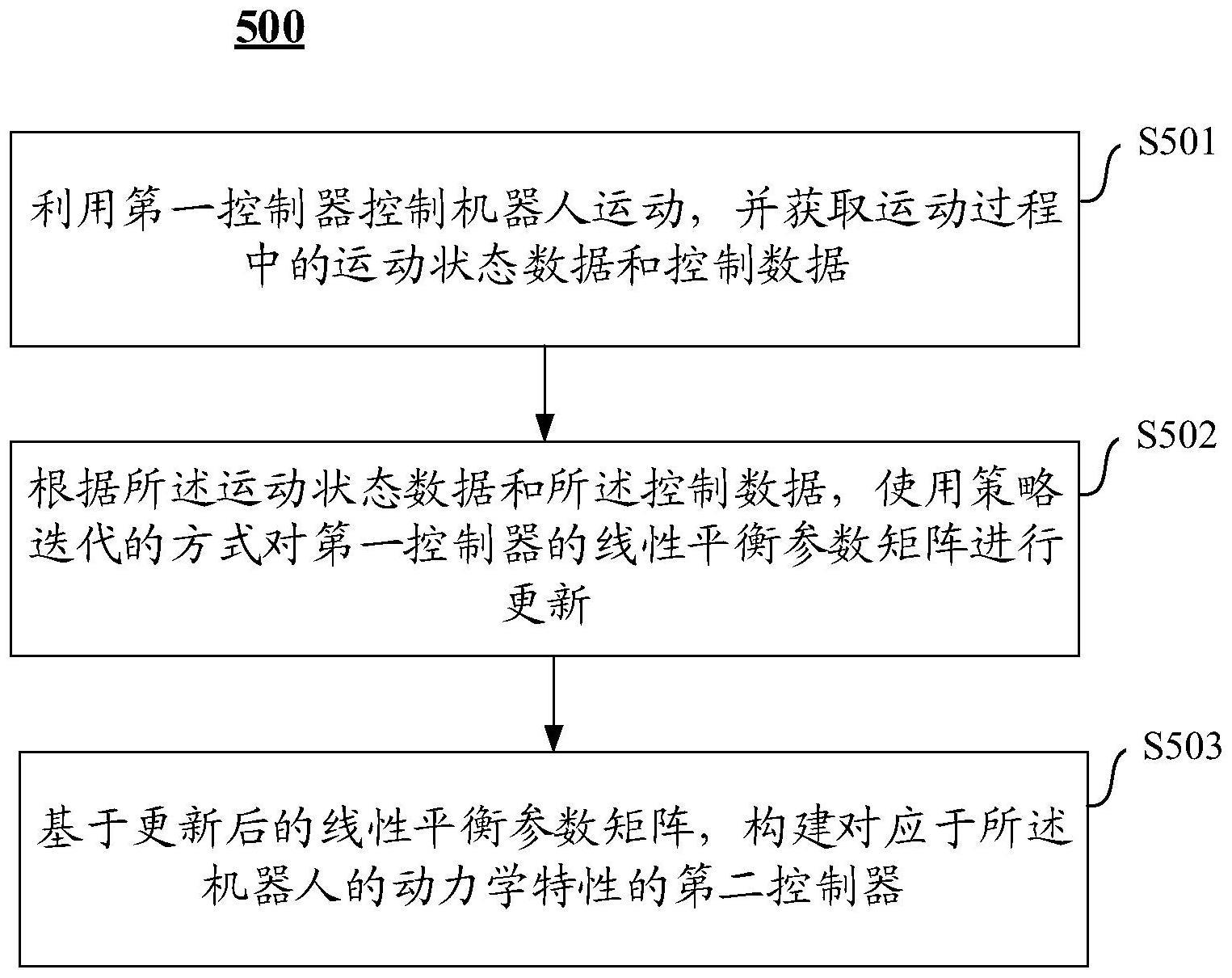
2、一方面,本公开提供了一种构建机器人的控制器的方法,所述方法包括:利用第一控制器控制机器人运动,并获取运动过程中的运动状态数据和控制数据;根据所述运动状态数据和所述控制数据,使用策略迭代的方式对第一控制器的线性平衡参数矩阵进行更新;以及基于更新后的线性平衡参数矩阵,构建对应于所述机器人的动力学特性的第二控制器。
3、例如,所述第一控制器的线性平衡参数矩阵为稳定控制增益矩阵。
4、例如,所述机器人的动力学特性关联于至少一个可变参数,所述第一控制器对应于所述可变参数为第一值的动力学特性;所述第二控制器对应于所述可变参数为第二值的动力学特性。
5、例如,所述第一控制器控制所述机器人在类平衡运动状态下运动,所述类平衡状态下的机器人在运动过程中处于平衡点附近,在所述第二控制器控制下的机器人相对于在所述第一控制器控制下的机器人,在运动过程中具有更优的控制效果。
6、例如,所述第一控制器和所述第二控制器为线性控制器,针对运动过程中的各个时刻,所述控制器提供的控制力矩负相关于所述线性平衡参数矩阵和所述机器人的运动状态数据之间的乘积。
7、例如,所述利用第一控制器控制机器人运动,并获取运动过程中的运动状态数据和控制数据,还包括:由所述第一控制器,根据所述机器人的当前运动状态,确定初始控制指令;对所述初始控制指令指示的控制数据施加扰动,获取所述第一控制器的控制数据;以及根据所述第一控制器的控制数据,控制所述机器人运动,并采集所述运动过程中的运动状态数据。
8、例如,所述运动状态数据和所述控制数据对应于多个时间间隔,所述根据所述运动状态数据和所述控制数据,使用策略迭代的方式对第一控制器的线性平衡参数矩阵进行更新,还包括:对对应于所述多个时间间隔中的所述运动状态数据和所述控制数据进行非线性组合以确定训练数据集合,基于所述训练数据集合,确定迭代关系函数;以及根据所述迭代关系函数,对迭代目标项进行多次策略迭代,逼近得到对应于所述机器人的动力学特性的所述线性平衡参数矩阵。
9、例如,所述根据所述迭代关系函数,对迭代目标项进行多次策略迭代,逼近得到对应于所述机器人的动力学特性的线性平衡参数矩阵,包括:在各次策略迭代中,确定所述迭代目标项是否收敛,响应于确定所述迭代目标项收敛,停止策略迭代;以及根据所述收敛的迭代目标项,更新所述线性平衡参数矩阵。
10、例如,所述迭代关系函数符合李雅普诺夫方程的形式,所述迭代目标项包括待迭代的线性平衡参数矩阵,以及以所述待迭代的线性平衡参数矩阵为参数的李雅普诺夫方程的解,所述迭代关系函数指示:根据本次策略迭代中的线性平衡参数矩阵以及本次策略迭代对应的李雅普诺夫方程的解,计算下次策略迭代对应的线性平衡参数矩阵。
11、例如,所述迭代目标项收敛包括:相邻两次策略迭代对应的李雅普诺夫方程的解之差小于预设值。
12、例如,所述机器人包括:包括多个关节的轮腿部、连接至所述轮腿部的基座部、以及用于控制所述轮腿部中的主动轮的驱动电机;所述运动数据包括:对应于多个时间间隔的基座部俯仰角、基座部俯仰角速度、主动轮的线性速度;以及所述控制数据包括:对应于多个时间间隔的驱动电机的输出力矩。
13、在又一方面,本公开提供了一种机器人,所述机器人包括:数据采集装置,被配置为:在第一控制器控制机器人运动的情况下,获取所述机器人的运动状态数据;数据处理装置,被配置为:获取与所述运动状态数据对应的控制数据;基于所述运动状态数据和所述控制数据,使用策略迭代的方式对第一控制器的线性平衡参数矩阵进行更新;以及基于更新后的线性平衡参数矩阵,构建对应于所述机器人的动力学特性的第二控制器。
14、例如,所述机器人还包括:轮腿部,包括多个关节;基座部,其连接至该轮腿部;驱动电机,被设置在所述机器人上,以基于所述控制器控制所述轮腿部中的主动轮。
15、在又一方面,本公开提供了一种非暂时性计算机可读介质,其上存储有至少一条指令,所述指令集由处理器加载并执行以实现权利要求1至111所述的方法中的至少一项。
16、在又一方面,本公开提供了一种控制机器人的方法,所述机器人由主动轮驱动,所述方法包括:接收运动指令,所述运动指令指示所述机器人的运动轨迹;根据运动指令,控制所述主动轮的驱动力,以使得所述机器人在第一控制器控制下运动并获取运动过程中的运动状态数据和控制数据;基于所述运动状态数据和所述控制数据,使用策略迭代的方式构建对应于所述机器人的动力学特性的第二控制器;以及利用所述第二控制器控制所述主动轮的驱动力,以使得所述机器人平稳运动。
17、本公开的实施例可选地结合了最优控制技术,提出了一种基于自适应动态规划的策略迭代方法。该基于自适应动态规划的策略迭代方法能够在机器人的动力学参数存在改变的情况下,动态地迭代控制器中的线性平衡参数矩阵以获取对应于参数变化后的机器人的动力学特性的控制器。即使机器人的动力学参数变化,该控制器也能使得机器人在平衡状态下也能以最优的控制效果沿目标轨迹行进。
技术特征:
1.一种构建机器人的控制器的方法,所述方法包括:
2.如权利要求1所述的方法,其中,所述第一控制器的线性平衡参数矩阵为稳定控制增益矩阵。
3.如权利要求1所述的方法,其中,所述机器人的动力学特性关联于至少一个可变参数,所述第一控制器对应于所述可变参数为第一值的动力学特性;所述第二控制器对应于所述可变参数为第二值的动力学特性。
4.如权利要求1所述的方法,其中,
5.如权利要求2所述的方法,其中,所述第一控制器和所述第二控制器为线性控制器,针对运动过程中的各个时刻,所述控制器提供的控制力矩负相关于所述线性平衡参数矩阵和所述机器人的运动状态数据之间的乘积。
6.如权利要求2所述的方法,其中,所述利用第一控制器控制机器人运动,并获取运动过程中的运动状态数据和控制数据,还包括:
7.如权利要求6所述的方法,其中,所述运动状态数据和所述控制数据对应于多个时间间隔,所述根据所述运动状态数据和所述控制数据,使用策略迭代的方式对第一控制器的线性平衡参数矩阵进行更新,还包括:
8.如权利要求7所述的方法,其中,所述根据所述迭代关系函数,对迭代目标项进行多次策略迭代,逼近得到对应于所述机器人的动力学特性的线性平衡参数矩阵,包括:
9.如权利要求8所述的方法,其中,所述迭代关系函数符合李雅普诺夫方程的形式,所述迭代目标项包括待迭代的线性平衡参数矩阵,以及以所述待迭代的线性平衡参数矩阵为参数的李雅普诺夫方程的解,
10.如权利要求8所述的方法,其中,所述迭代目标项收敛包括:相邻两次策略迭代对应的李雅普诺夫方程的解之差小于预设值。
11.如权利要求1所述的方法,其中,
12.一种机器人,所述机器人包括:
13.如权利要求12所述的机器人,所述机器人还包括:轮腿部,包括多个关节;基座部,其连接至该轮腿部;驱动电机,被设置在所述机器人上,以基于所述控制器控制所述轮腿部中的主动轮。
14.一种非暂时性计算机可读介质,其上存储有至少一条指令,所述指令集由处理器加载并执行以实现权利要求1至111所述的方法中的至少一项。
15.一种控制机器人的方法,所述机器人由主动轮驱动,所述方法包括:
技术总结
公开了一种构建机器人的控制器的方法、机器人、非暂时性计算机可读介质以及一种控制机器人的方法,所述方法包括:利用第一控制器控制机器人运动,并获取运动过程中的运动状态数据和控制数据;根据所述运动状态数据和所述控制数据,使用策略迭代的方式对第一控制器的线性平衡参数矩阵进行更新;以及基于更新后的线性平衡参数矩阵,构建对应于所述机器人的动力学特性的第二控制器。本公开能够自适应地获取能够对机器人进行灵活控制的控制器。
技术研发人员:王帅,张竞帆
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!