一种基于全域感知信息的路径规划方法及系统与流程
本发明涉及智能交通,具体涉及一种基于全域感知信息的路径规划方法及系统。另外,还涉及一种电子设备及处理器可读存储介质。
背景技术:
1、近年来,随着人工智能技术的快速发展,无人驾驶车辆的应用越来越广泛。尤其是在封闭或者半封闭场景下,无人驾驶车辆已经逐步投入试运营。然而,在该场景下路径规划是无人驾驶车辆的关键技术之一。在实际应用过程中,如果车辆路径出现了断路或路况和预设情况不一致时,就面临路径重新规划的问题。如果只是局部出现这种问题,就没有必要做全局的重新计算。然而在开放道路的路径规划中,由于车辆通常不能知道全局的路况势态变动情况,因而只能将局部情况纳入全局势态,做全局的重新计算,导致存在路径规划运算量较大,效率较低的缺陷。因此如何设计一种简单高效,且能够降低运算量的路径规划方案具有非常重要的现实意义。
技术实现思路
1、为此,本发明提供一种基于全域感知信息的路径规划方法及系统,以解决现有技术中存在的路径规划方案局限性较高,导致路径规划运算量较大,效率较低的问题。
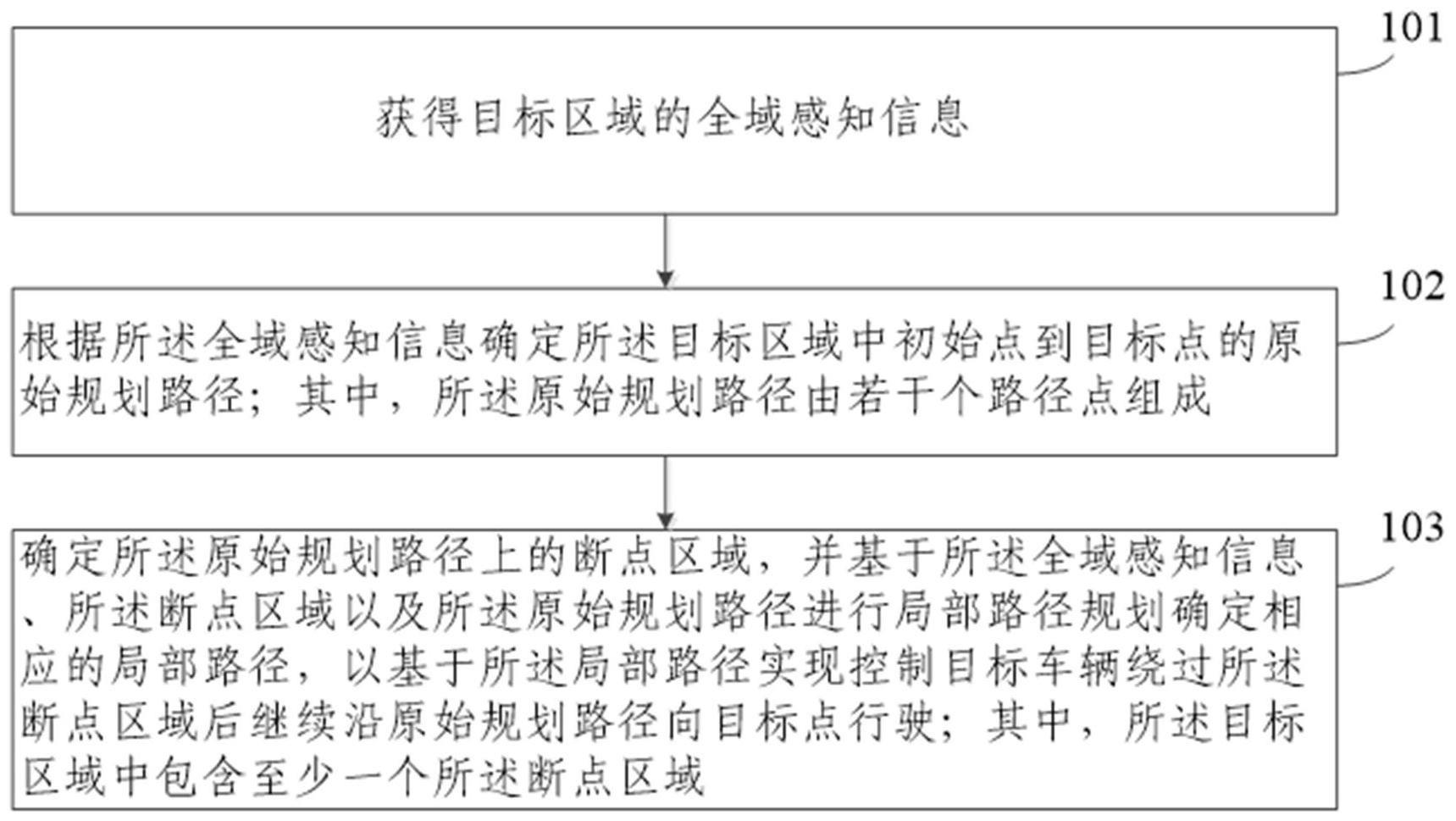
2、第一方面,本发明提供一种基于全域感知信息的路径规划方法,包括:获得目标区域的全域感知信息;
3、根据所述全域感知信息确定所述目标区域中初始点到目标点的原始规划路径;其中,所述原始规划路径由若干个路径点组成;
4、确定所述原始规划路径上的断点区域,并基于所述全域感知信息、所述断点区域以及所述原始规划路径进行局部路径规划确定相应的局部路径,以基于所述局部路径实现控制目标车辆绕过所述断点区域后继续沿原始规划路径向目标点行驶;其中,所述目标区域中包含至少一个所述断点区域。
5、进一步的,基于所述全域感知信息、所述断点区域以及所述原始规划路径进行局部路径规划确定相应的局部路径,具体包括:
6、确定所述断点区域与所述原始规划路径之间形成的断点;其中,所述断点包括位于所述原始规划路径的始发点一侧的入口断点以及位于所述原始规划路径的目标点一侧的出口断点;
7、基于所述全域感知信息从所述入口断点开始沿所述原始规划路径向所述始发点进行查找,以确定所述原始规划路径上对应交叉路口的第一路径点;并基于所述全域感知信息从所述出口断点开始沿所述原始规划路径向所述目标点进行查找,以确定所述原始规划路径上对应交叉路口的第二路径点;
8、将所述第一路径点作为所述局部路径始发点,将所述第二路径点作为局部路径目标点,并利用预设的最短路径算法重新进行局部路径规划,以确定所述局部路径始发点和所述局部路径目标点之间能够绕过所述断点区域的最短路径,并将所述最短路径作为所述局部路径。
9、进一步的,所述最短路径算法为dijkstra算法或a-star算法。
10、进一步的,所述的基于全域感知信息的路径规划方法,还包括:将至少一个所述局部路径与所述原始规划路径连接,获得所述目标区域中始发点到目标点的完整路径规划信息。
11、进一步的,所述的基于全域感知信息的路径规划方法,所述全域感知信息包括所述目标区域对应的事态感知信息、地理状态信息以及地理势态信息。
12、进一步的,所述的基于全域感知信息的路径规划方法,还包括:当目标车辆基于所述原始规划路径从初始点向目标点行驶过程中检测到出现所述断点区域时,基于所述局部路径控制目标车辆绕过所述断点区域后继续沿原始规划路径向目标点行驶。
13、第二方面,本发明还提供一种基于全域感知信息的路径规划系统,包括:
14、全域感知信息获取单元,用于获得目标区域的全域感知信息;
15、原始路径规划单元,用于根据所述全域感知信息确定所述目标区域中初始点到目标点的原始规划路径;其中,所述原始规划路径由若干个路径点组成;
16、局部路径规划单元,用于确定所述原始规划路径上的断点区域,并基于所述全域感知信息、所述断点区域以及所述原始规划路径进行局部路径规划确定相应的局部路径,以基于所述局部路径实现控制目标车辆绕过所述断点区域后继续沿原始规划路径向目标点行驶;其中,所述目标区域中包含至少一个所述断点区域。
17、进一步的,所述局部路径规划单元,具体用于:
18、确定所述断点区域与所述原始规划路径之间形成的断点;其中,所述断点包括位于所述原始规划路径的始发点一侧的入口断点以及位于所述原始规划路径的目标点一侧的出口断点;
19、基于所述全域感知信息从所述入口断点开始沿所述原始规划路径向所述始发点进行查找,以确定所述原始规划路径上对应交叉路口的第一路径点;并基于所述全域感知信息从所述出口断点开始沿所述原始规划路径向所述目标点进行查找,以确定所述原始规划路径上对应交叉路口的第二路径点;
20、将所述第一路径点作为所述局部路径始发点,将所述第二路径点作为局部路径目标点,并利用预设的最短路径算法重新进行局部路径规划,以确定所述局部路径始发点和所述局部路径目标点之间能够绕过所述断点区域的最短路径,并将所述最短路径作为所述局部路径。
21、进一步的,所述最短路径算法为dijkstra算法或a-star算法。
22、进一步的,所述的基于全域感知信息的路径规划系统,还包括:完整路径确定单元,用于将至少一个所述局部路径与所述原始规划路径连接,获得所述目标区域中始发点到目标点的完整路径规划信息。
23、进一步的,所述的基于全域感知信息的路径规划系统,所述全域感知信息包括所述目标区域对应的事态感知信息、地理状态信息以及地理势态信息。
24、进一步的,所述的基于全域感知信息的路径规划系统,还包括:车辆控制单元,用于当目标车辆基于所述原始规划路径从初始点向目标点行驶过程中检测到出现所述断点区域时,基于所述局部路径控制目标车辆绕过所述断点区域后继续沿原始规划路径向目标点行驶。
25、第三方面,本发明还提供一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行所述计算机程序时实现如上述任意一项所述基于全域感知信息的路径规划方法的步骤。
26、第四方面,本发明还提供一种处理器可读存储介质,所述处理器可读存储介质上存储有计算机程序,该计算机程序被处理器执行时实现如上述任意一项所述基于全域感知信息的路径规划方法的步骤。
27、本发明提供的基于全域感知信息的路径规划方法,通过获得目标区域的全域感知信息,并根据所述全域感知信息确定所述目标区域中初始点到目标点的原始规划路径;然后确定所述原始规划路径上的断点区域,并基于所述全域感知信息、所述断点区域以及所述原始规划路径进行局部路径规划确定相应的局部路径,以基于所述局部路径实现控制目标车辆绕过所述断点区域后继续沿原始规划路径向目标点行驶,从而能够极大减少路径规划的运算量,提高了云控中心的运算处理效率,进而提升云控中心的路径规划能力。
技术特征:
1.一种基于全域感知信息的路径规划方法,其特征在于,包括:
2.根据权利要求1所述的基于全域感知信息的路径规划方法,其特征在于,基于所述全域感知信息、所述断点区域以及所述原始规划路径进行局部路径规划确定相应的局部路径,具体包括:
3.根据权利要求2所述的基于全域感知信息的路径规划方法,其特征在于,所述最短路径算法为dijkstra算法或a-star算法。
4.根据权利要求1或2所述的基于全域感知信息的路径规划方法,其特征在于,还包括:将至少一个所述局部路径与所述原始规划路径连接,获得所述目标区域中始发点到目标点的完整路径规划信息。
5.根据权利要求1-4任意一项所述的基于全域感知信息的路径规划方法,其特征在于,所述全域感知信息包括所述目标区域对应的事态感知信息、地理状态信息以及地理势态信息。
6.一种基于全域感知信息的路径规划系统,其特征在于,包括:
7.根据权利要求6所述的基于全域感知信息的路径规划系统,其特征在于,所述局部路径规划单元,具体用于:
8.根据权利要求7所述的基于全域感知信息的路径规划系统,其特征在于,所述最短路径算法为dijkstra算法或a-star算法。
9.一种电子设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至5任意一项所述基于全域感知信息的路径规划方法的步骤。
10.一种处理器可读存储介质,所述处理器可读存储介质上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1至5任意一项所述基于全域感知信息的路径规划方法的步骤。
技术总结
本发明提供一种基于全域感知信息的路径规划方法及系统。该方法包括:获得目标区域的全域感知信息;根据所述全域感知信息确定所述目标区域中初始点到目标点的原始规划路径;其中,所述原始规划路径由若干个路径点组成;确定所述原始规划路径上的断点区域,并基于所述全域感知信息、所述断点区域以及所述原始规划路径进行局部路径规划确定相应的局部路径,以基于所述局部路径实现控制目标车辆绕过所述断点区域后继续沿原始规划路径向目标点行驶;其中,所述目标区域中包含至少一个所述断点区域。本发明提供的基于全域感知信息的路径规划方法,能够极大减少路径规划的运算量,提高了云控中心的运算处理效率,从而提升云控中心的路径规划能力。
技术研发人员:丛文斌,丛升日,余立新,刘房勇
受保护的技术使用者:中科大路(青岛)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!