一种车辆智能驾驶方法、装置、设备及车辆与流程
本公开涉及汽车,尤其涉及一种车辆智能驾驶方法、装置、设备及车辆。
背景技术:
1、近年来,越来越多的汽车开始拥有智能驾驶功能。智能驾驶功能的运行,需要依赖配套的城市基础设施建设(如车道线、信号灯)和网络通信支持(如通信基站、卫星定位)。然而,在基础设施建设或网络通信不完善的特殊驾驶环境下,如进入无人区、山路、村路和丛林等环境中,汽车的智能驾驶功能将受到极大的限制,甚至会造成智能驾驶功能的丧失。
2、因此,如何在特殊驾驶环境中保持稳定的智能驾驶功能,成为了汽车设计的一个重要问题。
技术实现思路
1、为了解决上述技术问题,本公开提供了一种车辆智能驾驶方法、装置、设备及车辆,以提高车辆智能驾驶的稳定性。
2、本公开提供了一种车辆智能驾驶方法,包括:
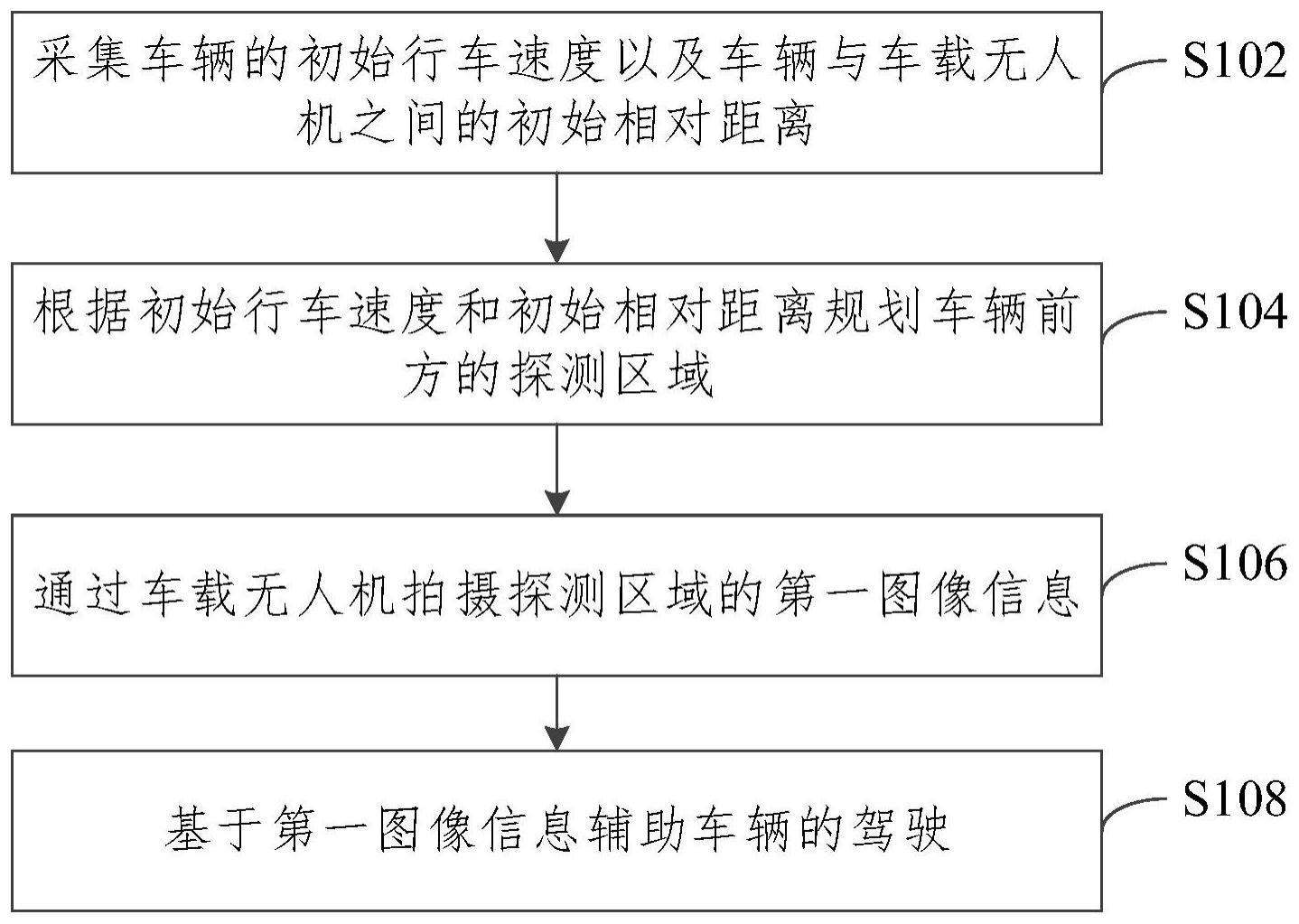
3、采集车辆的初始行车速度以及所述车辆与车载无人机之间的初始相对距离;
4、根据所述初始行车速度和所述初始相对距离规划所述车辆前方的探测区域;
5、通过所述车载无人机拍摄所述探测区域的第一图像信息;
6、基于所述第一图像信息辅助所述车辆的驾驶。
7、在一些实施例中,所述根据所述初始行车速度和所述初始相对距离规划所述车辆前方的探测区域,包括:
8、根据所述初始行车速度确定所述车辆前方的第一探测距离;
9、根据所述初始相对距离确定所述车载无人机的第二探测距离;
10、判断所述第二探测距离是否大于所述第一探测距离;
11、如果是,则确定以所述车载无人机为探测中心,且覆盖所述车辆的探测区域;
12、如果否,则控制调整所述第一探测距离和/或所述第二探测距离。
13、在一些实施例中,所述控制调整所述第一探测距离,包括:
14、至少一次执行如下第一车速调整策略:
15、控制所述车辆调整所述初始行车速度,根据调整后的行车速度确定的新的第一探测距离;
16、当所述新的第一探测距离小于所述第二探测距离时,停止执行所述第一车速调整策略。
17、在一些实施例中,所述控制调整所述第二探测距离,包括:
18、至少一次执行如下第二车速调整策略:
19、控制所述车辆调整所述初始行车速度,根据调整后的行车速度和所述车载无人机当前的飞行速度,确定所述车辆与所述车载无人机之间的新的相对距离;
20、根据所述新的相对距离确定所述车载无人机的新的第二探测距离;
21、当所述新的第二探测距离大于所述第一探测距离时,停止执行所述第二车速调整策略。
22、在一些实施例中,所述控制调整所述第二探测距离,包括:
23、至少一次执行如下飞行调整策略:
24、控制所述车载无人机调整飞行速度,根据调整后的飞行速度和所述初始行车速度,确定所述车辆与所述车载无人机之间的新的相对距离;
25、根据所述新的相对距离确定所述车载无人机的新的第二探测距离;
26、当所述新的第二探测距离大于所述第一探测距离时,停止执行所述飞行调整策略。
27、在一些实施例中,所述方法还包括:
28、获取所述车载无人机拍摄的包括所述车辆的第二图像信息;
29、根据所述第二图像信息确定所述车辆与所述车载无人机之间的相对距离。
30、本公开提供了一种车辆智能驾驶装置,包括:
31、采集模块,用于采集车辆的初始行车速度,所述车辆与车载无人机之间的初始相对距离;
32、规划模块,用于根据所述初始行车速度和所述初始相对距离规划所述车辆前方的探测区域;
33、拍摄模块,用于通过所述车载无人机拍摄所述探测区域的第一图像信息;
34、辅助模块,用于基于所述第一图像信息辅助所述车辆的驾驶。
35、本公开还提供了一种电子设备,包括:
36、一个或多个处理器;
37、存储器,用于存储一个或多个程序或指令;
38、所述处理器通过调用所述存储器存储的程序或指令,用于执行上述方法的步骤。
39、本公开还提供了一种车辆,所述车辆包括上述的电子设备,还包括与所述电子设备相连的车载无人机。
40、在一些实施例中,所述车辆还包括用于连接所述电子设备和所述车载无人机的无线图传模块。
41、本公开还提供了一种计算机可读存储介质,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行上述任一种方法的步骤。
42、本公开实施例提供的技术方案与现有技术相比具有如下优点:
43、本公开实施例提供的车辆智能驾驶方法、装置、设备及车辆,包括:采集车辆的初始行车速度以及车辆与车载无人机之间的初始相对距离;根据初始行车速度和初始相对距离规划车辆前方的探测区域;通过车载无人机拍摄探测区域的第一图像信息;基于第一图像信息辅助车辆的驾驶。上述通过车载无人机拍摄探测区域的第一图像信息,并基于第一图像信息辅助车辆的驾驶的技术方案,无需依赖车道线、信号灯等城市基础设施建设,有效保障了在特殊环境中智能驾驶的稳定性。
技术特征:
1.一种车辆智能驾驶方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述初始行车速度和所述初始相对距离规划所述车辆前方的探测区域,包括:
3.根据权利要求2所述的方法,其特征在于,所述控制调整所述第一探测距离,包括:
4.根据权利要求2所述的方法,其特征在于,所述控制调整所述第二探测距离,包括:
5.根据权利要求2所述的方法,其特征在于,所述控制调整所述第二探测距离,包括:
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.一种车辆智能驾驶装置,其特征在于,包括:
8.一种电子设备,其特征在于,包括:
9.一种车辆,其特征在于,所述车辆包括如权利要求9所述的电子设备,还包括与所述电子设备相连的车载无人机。
10.根据权利要求9所述的车辆,其特征在于,所述车辆还包括用于连接所述电子设备和所述车载无人机的无线图传模块。
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如权利要求1至6任一项所述方法的步骤。
技术总结
本公开涉及一种车辆智能驾驶方法、装置、设备及车辆。其中,该方法包括:采集车辆的初始行车速度以及车辆与车载无人机之间的初始相对距离;根据初始行车速度和初始相对距离规划车辆前方的探测区域;通过车载无人机拍摄探测区域的第一图像信息;基于第一图像信息辅助车辆的驾驶。本公开技术方案能够有效保障在特殊环境中智能驾驶的稳定性。
技术研发人员:杜思杭
受保护的技术使用者:北京车和家汽车科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!