跟车规划方法、装置和移动工具与流程
本发明涉及自动驾驶,尤其涉及一种跟车规划方法、装置和移动工具。
背景技术:
1、近年来,无人驾驶技术依托人工智能技术的快速发展也变得越来越成熟,正在从出行方式、无人物流、特种作业等方面,逐渐改变人们的日常生活。使无人车实现稳定的跟车是无人车的难点问题。为了提高无人车的舒适性和安全性,需要开发一套稳定性强和运算迅速的跟车规划方法,使无人车能够适应各种跟车场景。
2、现有的跟车方法主要基于传统自适应巡航控制(adaptive cruise control,acc)的思路。acc的主要原理是从车上的传感单元获取目标车辆的相对位置和速度,计算出当前车头时距(time headway,thw),再对比根据巡航车速和安全车距模型中设定的期望时距,决定当前是否需要加速或减速,控制模块接收加减速度信息,进一步确定驱动/制动扭矩大小,最终实现跟车。
3、基于acc制思路的跟车方法,由于每时每刻都根据前车的瞬时位置和速度计算出一个当前的目标加速度,因此该目标加减速度是时刻变化的,时间上不具有一致性。
技术实现思路
1、本发明提供了一种跟车规划方法、系统和移动工具,以解决现有技术中所存在的问题。
2、为解决上述问题,本发明第一方面提供了一种跟车规划方法,所述方法包括:
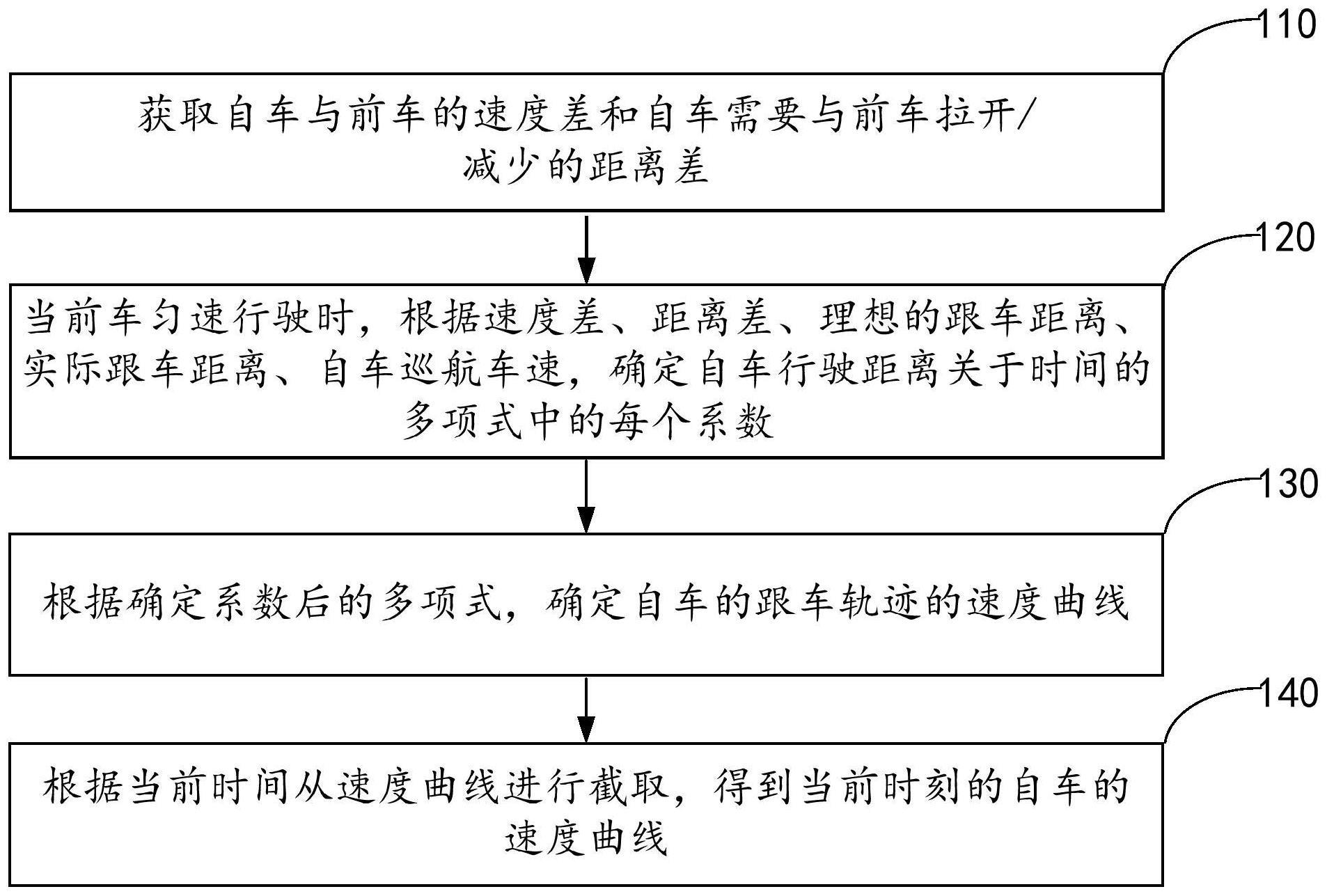
3、获取自车与前车的速度差和自车需要与前车拉开/减少的距离差;
4、当前车匀速行驶时,根据所述速度差、所述距离差、理想的跟车距离、实际跟车距离、自车巡航车速,确定自车行驶距离关于时间的多项式中的每个系数;
5、根据确定系数后的多项式,确定自车的跟车轨迹的速度曲线;
6、根据当前时间从所述速度曲线进行截取,得到当前时刻的自车的速度曲线。
7、优选的,所述方法还包括:
8、当前车变速行驶时,如果速度差的绝对值大于预设的第一阈值,且所述距离差的绝对值大于预设的第二阈值时,重新规划自车的跟车轨迹的速度曲线。
9、优选的,所述自车行驶距离关于时间的多项式具体为:
10、st=c3t3+c2t2+c1t+c0
11、其中,st为自车行驶距离,t为时间,c0为常数、c1、c2和c3均为多项式系数。
12、优选的,所述根据所述速度差、所述距离差、理想的跟车距离、实际跟车距离、自车巡航车速,确定自车行驶距离关于时间的多项式中的每个系数具体包括:
13、根据以下公式计算多项式中的系数:
14、
15、其中,vl为前车速度,v0为自车速度,d*为理想的跟车距离,d0为实际跟车距离,vl-v0为速度差,d*-d0为距离差,vcruise为自车巡航车速,k为预设比例项,t1为当前时间。
16、本发明第二方面提供了一种跟车规划装置,所述装置包括:
17、获取模块,所述获取模块用于获取自车与前车的速度差和自车需要与前车拉开/减少的距离差;
18、确定模块,所述确定模块用于当前车匀速行驶时,根据所述速度差、所述距离差、理想的跟车距离、实际跟车距离、自车巡航车速,确定自车行驶距离关于时间的多项式中的每个系数;
19、所述确定模块还用于,根据确定系数后的多项式,确定自车的跟车轨迹的速度曲线;
20、截取模块,所述截取模块用于根据当前时间,从所述速度曲线进行截取,得到当前时刻的自车的速度曲线。
21、优选的,所述装置还包括:
22、重规划模块,所述重规划模块用于当前车变速行驶时,如果速度差的绝对值大于预设的第一阈值,且所述距离差的绝对值大于预设的第二阈值时,重新规划自车的跟车轨迹的速度曲线。
23、优选的,所述自车行驶距离关于时间的多项式具体为:
24、st=c3t3+c2t2+c1t+c0
25、其中,st为自车行驶距离,t为时间,c0为常数、c1、c2和c3均为多项式系数。
26、优选的,所述确定模块具体用于:
27、根据以下公式计算多项式中的系数:
28、
29、其中,vl为前车速度,v0为自车速度,d*为理想的跟车距离,d0为实际跟车距离,vl-v0为速度差,d*-d0为距离差,vcruise为自车巡航车速,k为预设比例项,t1为当前时间。
30、本发明第三方面提供了一种计算机服务器,包括:存储器、处理器和收发器;
31、所述处理器用于与所述存储器耦合,读取并执行所述存储器中的指令,以实现如第一方面所述的跟车规划方法;
32、所述收发器与所述处理器耦合,由所述处理器控制所述收发器进行消息收发。
33、本发明第四方面提供了一种芯片系统,包括处理器,所述处理器与存储器的耦合,所述存储器存储有程序指令,当所述存储器存储的程序指令被所述处理器执行时实现如第一方面所述的跟车规划方法。
34、本发明第五方面提供了一种计算机系统,包括存储器,以及与所述存储器通信连接的一个或多个处理器;
35、所述存储器中存储有可被所述一个或多个处理器执行的指令,所述指令被所述一个或多个处理器执行,以使所述一个或多个处理器实现如第一方面所述的跟车规划方法。
36、本发明第六方面提供了一种移动工具,包括上述第三方面所述的计算机服务器。
37、通过应用本发明实施例提供的跟车规划方法,通过计算实时预测自车在规划时长内达到跟车状态和理想跟车状态的差距,该差距在允许范围内时沿用一次规划结果,时间一致性好,否则触发一次重新规划,保证规划的有效性。
技术特征:
1.一种跟车规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述自车行驶距离关于时间的多项式具体为:
4.根据权利要求3所述的方法,其特征在于,所述根据所述速度差、所述距离差、理想的跟车距离、实际跟车距离、自车巡航车速,确定自车行驶距离关于时间的多项式中的每个系数具体包括:
5.一种跟车规划装置,其特征在于,所述装置包括:
6.根据权利要求5所述的装置,其特征在于,所述装置还包括:
7.根据权利要求5所述的装置,其特征在于,所述自车行驶距离关于时间的多项式具体为:
8.根据权利要7所述的装置,其特征在于,所述确定模块具体用于:
9.一种计算机服务器,其特征在于,包括:存储器、处理器和收发器;
10.一种芯片系统,其特征在于,包括处理器,所述处理器与存储器的耦合,所述存储器存储有程序指令,当所述存储器存储的程序指令被所述处理器执行时实现权利要求1-4任一项所述的跟车规划方法。
11.一种计算机系统,其特征在于,包括存储器,以及与所述存储器通信连接的一个或多个处理器;
12.一种移动工具,其特征在于,包括上述权利要求9所述的计算机服务器。
技术总结
本发明提供了一种跟车规划方法,包括:获取自车与前车的速度差和自车需要与前车拉开/减少的距离差;当前车匀速行驶时,根据速度差、距离差、理想的跟车距离、实际跟车距离、自车巡航车速,确定自车行驶距离关于时间的多项式中的每个系数;根据确定系数后的多项式,确定自车的跟车轨迹的速度曲线;根据当前时间从速度曲线进行截取,得到当前时刻的自车的速度曲线。由此,通过计算实时预测自车在规划时长内达到跟车状态和理想跟车状态的差距,该差距在允许范围内时沿用一次规划结果,时间一致性好,否则触发一次重新规划,保证规划的有效性。
技术研发人员:成成,徐成
受保护的技术使用者:武汉智行者科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!