无人履带车行驶目标曲率归一化方法与流程
1.本发明涉及无人履带车行驶技术领域,特别是一种无人履带车行驶目标曲率归一化方法。
背景技术:
2.电驱动无人履带车具有操纵灵活、驱动转矩响应快、具备自主驾驶能力等优势,是一种新型的无人平台。目前无人履带车的操纵模式主要以遥控操纵为主,当前无人履带车朝着高速大功率、高机动性能的方向发展,无人履带车速度的提高对车辆的转向性能要求越来越高,尤其高速运动下,容易造成车辆失控等问题。
技术实现要素:
3.本发明需要解决的技术问题是提供一种无人履带车不同行驶速度下目标曲率的控制方法。
4.为解决上述技术问题,本发明包括一种无人履带车行驶目标曲率归一化方法,包括以下步骤,遥控摇杆的转向行程采集:根据以选择遥控器的基本参数可知,遥控摇杆的转向行程的最小值与最大值,根据遥控信号接收器接收遥控摇杆的转向行程数据,得到此时的无人履带车的转向曲率,此时的车辆转向曲率为期望曲率;遥控摇杆期望曲率归一化设计:根据得到的期望曲率的值,根据设计最大曲率应用归一化方法,把数据映射到0~1范围之内处理,归一化结果:目标曲率 = 操纵员请求期望曲率/设计最大曲率;不同行驶速度下目标曲率控制:双侧独立电驱动履带车是采用差速转向进行弯道行驶,根据不同行驶速度确定不同目标曲率。
5.优选的,所述步骤不同行驶速度下目标曲率控制具体包括以下方法:当实际车速小于等于15km/h时,此时目标曲率以遥控输出为准;当实际车速大于15km/h且小于等于30km/h时,此时遥控转向行程的前30%为实际最大目标曲率的15%,行程的后70%对应最大目标曲率的后85%;当实际车速大于30km/h且小于等于50km/h时,此时遥控转向行程的前40%为实际最大目标曲率的15%,行程的后60%对应最大目标曲率的后85%;当实际车速大于50km/h时,此时遥控转向行程的前60%为实际最大目标曲率的20%,行程的后40%对应最大目标曲率的后80%。
6.采用上述方法后,本发明不需要改变无人履带车现有结构,通过控制方法保证在不同车速的转向工况下,根据无人履带车的不同行驶速度,根据遥控摇杆的期望曲率进行不同的解释说明,保证无人履带车行驶过程中的安全、稳定。
附图说明
7.下面结合附图和具体实施方式对本发明作进一步详细的说明。
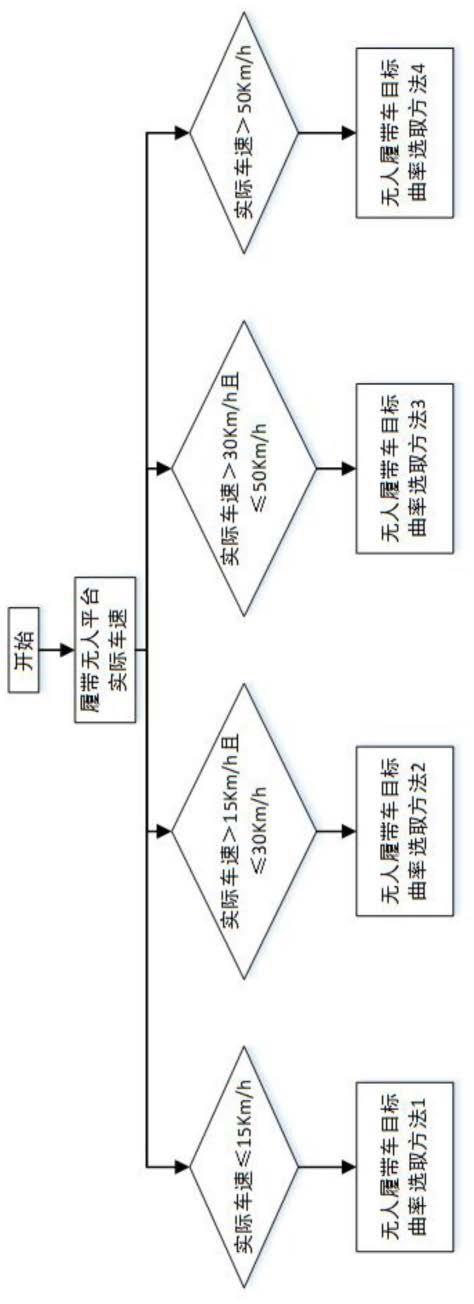
8.图1为本发明一种无人履带车行驶目标曲率归一化方法的流程图。
9.图2为本发明车速小于等于15km/h时目标曲率与期望曲率关系图。
10.图3为本发明车速大于15km/h且小于等于30km/h时目标曲率与期望曲率关系图。
11.图4为本发明车速大于30km/h且小于等于50km/h目标曲率与期望曲率关系图。
12.图5为本发明车速大于50km/h时目标曲率与期望曲率关系图。
具体实施方式
13.如图1所示,本发明包括一种无人履带车行驶目标曲率归一化方法,包括以下步骤,遥控摇杆的转向行程采集:根据以选择遥控器的基本参数可知,遥控摇杆的转向行程的最小值与最大值,根据遥控信号接收器接收遥控摇杆的转向行程数据,得到此时的无人履带车的转向曲率,此时的车辆转向曲率为期望曲率;遥控摇杆期望曲率归一化设计:根据得到的期望曲率的值,根据设计最大曲率应用归一化方法,把数据映射到0~1范围之内处理,归一化结果:目标曲率 = 操纵员请求期望曲率/设计最大曲率;不同行驶速度下目标曲率控制:双侧独立电驱动履带车是采用差速转向进行弯道行驶,根据不同行驶速度确定不同目标曲率。
14.如图2所示,当实际车速小于等于15km/h时,此时车速较小,车辆转向控制操纵简单,更好控制,此时目标曲率以遥控输出为准。
15.如图3所示,当实际车速大于15km/h且小于等于30km/h时,此时车速适中,车辆转向控制操纵较好控制,为了使驾驶员更好控制车辆,此时遥控转向行程的前30%为实际最大目标曲率的15%,行程的后70%对应最大目标曲率的后85%。
16.如图4所示,当实际车速大于30km/h且小于等于50km/h时,此时车速较高,车辆转向控制操纵难度加大,为了使驾驶员更好控制车辆,此时遥控转向行程的前40%为实际最大目标曲率的15%,行程的后60%对应最大目标曲率的后85%。
17.如图5所示,当实际车速大于50km/h时,此时车辆为高速行驶状态,车辆转向控制操纵难度大,为了使驾驶员更好控制车辆,此时遥控转向行程的前60%为实际最大目标曲率的20%,行程的后40%对应最大目标曲率的后80%。
18.根据不同车速范围选定不同目标曲率的对应关系,对于解决无人履带车在行驶中的转向问题起到了至关重要的作用,本发明提到的控制方法可以有效针对不同车速下的无人履带车的转向控制问题,简化驾驶员的操纵难度,保护车辆的安全、可靠。
19.虽然以上描述了本发明的具体实施方式,但是本领域熟练技术人员应当理解,这些仅是举例说明,可以对本实施方式作出多种变更或修改,而不背离本发明的原理和实质,本发明的保护范围仅由所附权利要求书限定。
技术特征:
1.一种无人履带车行驶目标曲率归一化方法,其特征在于,包括以下步骤,遥控摇杆的转向行程采集:根据以选择遥控器的基本参数可知,遥控摇杆的转向行程的最小值与最大值,根据遥控信号接收器接收遥控摇杆的转向行程数据,得到此时的无人履带车的转向曲率,此时的车辆转向曲率为期望曲率;遥控摇杆期望曲率归一化设计:根据得到的期望曲率的值,根据设计最大曲率应用归一化方法,把数据映射到0~1范围之内处理,归一化结果:目标曲率 = 操纵员请求期望曲率/设计最大曲率;不同行驶速度下目标曲率控制:双侧独立电驱动履带车是采用差速转向进行弯道行驶,根据不同行驶速度确定不同目标曲率。2.按照权利要求1所述的无人履带车行驶目标曲率归一化方法,其特征在于,所述步骤不同行驶速度下目标曲率控制具体包括以下方法:无人履带车最高时速设计为70km/h;当实际车速小于等于15km/h时,此时目标曲率以遥控输出为准;当实际车速大于15km/h且小于等于30km/h时,此时遥控转向行程的前30%为实际最大目标曲率的15%,行程的后70%对应最大目标曲率的后85%;当实际车速大于30km/h且小于等于50km/h时,此时遥控转向行程的前40%为实际最大目标曲率的15%,行程的后60%对应最大目标曲率的后85%;当实际车速大于50km/h时,此时遥控转向行程的前60%为实际最大目标曲率的20%,行程的后40%对应最大目标曲率的后80%。
技术总结
本发明涉及无人履带车行驶技术领域,特别是一种无人履带车行驶目标曲率归一化方法,包括以下步骤,遥控摇杆的转向行程采集;遥控摇杆期望曲率归一化设计;不同行驶速度下目标曲率控制:双侧独立电驱动履带车是采用差速转向进行弯道行驶,根据不同行驶速度确定不同目标曲率。采用上述方法后,本发明不需要改变无人履带车现有结构,通过控制方法保证在不同车速的转向工况下,根据无人履带车的不同行驶速度,根据遥控摇杆的期望曲率进行不同的解释说明,保证无人履带车行驶过程中的安全、稳定。稳定。稳定。
技术研发人员:赵坤 刘英哲
受保护的技术使用者:江苏英拓动力科技有限公司
技术研发日:2022.04.29
技术公布日:2022/7/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1