航向修正方法和电子设备与流程
【】本申请涉及目标状态估计,尤其涉及一种航向修正方法和电子设备。
背景技术
0、
背景技术:
1、视觉惯导里程计(visual-inertial odometry,vio)是用于目标状态估计的一项重要技术,在无人车及无人机自动驾驶、移动机器人等领域有着重要应用。vio通过结合图像的外源信息和惯性测量单元(inertial measurement unit,imu)的内源信息,获得对目标的状态估计结果,包括三维位置以及航向等。但是,在目标长距离运动的情况下,vio的航向估计结果会产生累计误差,导致目标难以完成既定任务。
2、为消除vio在航向估计上的累计误差,目前常用的方法是,建立全球导航卫星系统(global navigation satellite system,gnss)与vio的紧耦合系统,基于gnss的位移向量对vio的航向估计结果进行修正。但是,此种方法对目标的运动模态要求较高。当目标处于静止状态或垂直运动状态时,由于没有位移向量,因而该方法将难以适用。
技术实现思路
0、
技术实现要素:
1、本申请实施例提供了一种航向修正方法和电子设备,用于摆脱目标运动模态的限制,高可靠地消除视觉惯导里程计的航向累计误差,提高对目标的航向估计精度。
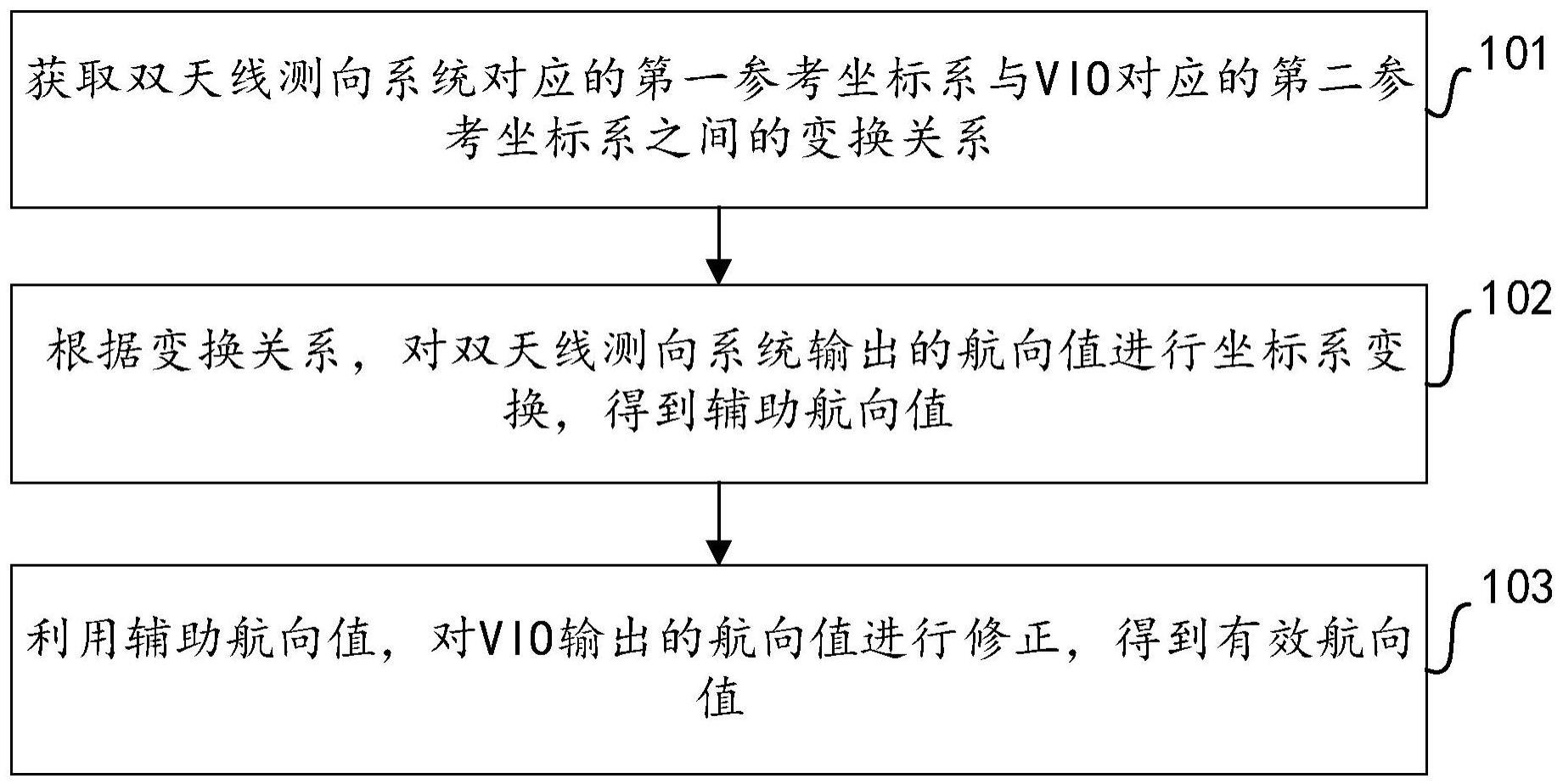
2、第一方面,本申请实施例提供一种航向修正方法,包括:获取第一参考坐标系与第二参考坐标系之间的变换关系,所述第一参考坐标系为双天线测向系统对应的参考坐标系,所述第二参考坐标系为视觉惯导里程计vio对应的参考坐标系;根据所述变换关系,对所述双天线测向系统输出的航向值进行坐标系变换,得到辅助航向值;利用所述辅助航向值,对所述vio输出的航向值进行修正,得到有效航向值。
3、其中一种可能的实现方式中,在所述获取第一参考坐标系与第二参考坐标系之间的变换关系之前,所述方法还包括:分别获取所述双天线测向系统输出的第一航向值以及所述vio输出的第二航向值;根据所述第一航向值以及所述第二航向值,确定所述第一参考坐标系与所述第二参考坐标系之间的第一航向偏移;根据所述第一航向偏移,确定所述第一参考坐标系与所述第二参考坐标系之间的变换关系。
4、其中一种可能的实现方式中,在所述根据所述第一航向值以及所述第二航向值,确定所述第一参考坐标系与所述第二参考坐标系之间的第一航向偏移之前,所述方法还包括:对所述第一航向值进行质量监测,得到若干个监测指标;根据所述若干个监测指标,确定所述第一航向值有效。
5、其中一种可能的实现方式中,所述根据所述第一航向值以及所述第二航向值,确定所述第一参考坐标系与所述第二参考坐标系之间的第一航向偏移,包括:根据所述第一航向值、以及预先设定的虚拟俯仰角和虚拟滚转角,生成第一四元数;根据所述第二航向值、以及所述vio输出的第二俯仰角以及第二滚转角,生成第二四元数;根据所述第一四元数以及所述第二四元数,确定所述第一参考坐标系与所述第二参考坐标系之间的第一航向偏移。
6、其中一种可能的实现方式中,所述根据所述第一航向值以及所述第二航向值,确定所述第一参考坐标系与所述第二参考坐标系之间第一航向偏移,包括:根据第n帧第一航向值以及第n帧第二航向值,计算第n帧的航向差值;根据所述第n帧的航向差值,对当前航向偏移估计值进行修正,所述当前航向偏移估计值根据初始航向偏移估计值以及前n-1帧的航向差值确定;如果修正后的航向偏移估计值处于收敛状态,则将所述修正后的航向偏移估计值确定为所述第一参考坐标系与所述第二参考坐标系之间第一航向偏移。
7、其中一种可能的实现方式中,如果所述修正后的航向偏移估计值未处于收敛状态,则所述方法还包括:根据第n+1帧第一航向值以及第n+1帧第二航向值,计算第n+1帧的航向差值;利用所述第n+1帧的航向差值,对所述修正后的航向偏移估计值进行再次修正。
8、其中一种可能的实现方式中,利用所述辅助航向值,对所述vio输出的航向值进行修正,得到有效航向值,包括:基于卡尔曼滤波算法,确定所述辅助航向值对所述vio输出的航向值的修正尺度;根据所述修正尺度对所述vio输出的航向值进行修正,得到有效航向值。
9、其中一种可能的实现方式中,基于卡尔曼滤波算法,确定所述辅助航向值对vio输出的航向值的修正尺度,包括:根据所述vio输出的航向值,生成航向约束矩阵;利用所述航向约束矩阵对卡尔曼系数进行约束,得到航向卡尔曼系数;根据所述航向卡尔曼系数,确定所述辅助航向值对vio输出的航向值的修正尺度。
10、第二方面,本申请实施例提供一种航向修正装置,所述装置包括:获取模块,用于获取第一参考坐标系与第二参考坐标系之间的变换关系,所述第一参考坐标系为双天线测向系统对应的参考坐标系,所述第二参考坐标系为vio对应的参考坐标系;变换模块,用于根据所述变换关系,对所述双天线测向系统输出的航向值进行坐标系变换,得到辅助航向值;修正模块,用于利用所述辅助航向值,对所述vio输出的航向值进行修正,得到有效航向值。
11、第三方面,本申请实施例提供一种电子设备,包括:至少一个处理器;以及与所述处理器通信连接的至少一个存储器,其中:所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令能够执行如第一方面所述的方法。
12、第四方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行如第一方面所述的方法。
13、通过上述技术方案,可摆脱目标运动模态的限制,高可靠地消除视觉惯导里程计的航向累计误差,提高对目标的航向估计精度。
技术特征:
1.一种航向修正方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述获取第一参考坐标系与第二参考坐标系之间的变换关系之前,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,在所述根据所述第一航向值以及所述第二航向值,确定所述第一参考坐标系与所述第二参考坐标系之间的第一航向偏移之前,所述方法还包括:
4.根据权利要求2所述的方法,其特征在于,所述根据所述第一航向值以及所述第二航向值,确定所述第一参考坐标系与所述第二参考坐标系之间的第一航向偏移,包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述第一航向值以及所述第二航向值,确定所述第一参考坐标系与所述第二参考坐标系之间第一航向偏移,包括:
6.根据权利要求5所述的方法,其特征在于,如果所述修正后的航向偏移估计值未处于收敛状态,则所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,利用所述辅助航向值,对所述vio输出的航向值进行修正,得到有效航向值,包括:
8.根据权利要求7所述的方法,其特征在于,基于卡尔曼滤波算法,确定所述辅助航向值对vio输出的航向值的修正尺度,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行如权利要求1至8任一所述的方法。
技术总结
本申请提出了一种航向修正方法和电子设备,涉及目标状态估计技术领域。其中,上述航向修正方法包括:获取双天线测向系统对应的第一参考坐标系与VIO对应的第二参考坐标系之间的变换关系;根据变换关系,对双天线测向系统输出的航向值进行坐标系变换,得到辅助航向值;利用辅助航向值,对VIO输出的航向值进行修正,得到有效航向值。通过上述技术方案,可摆脱目标运动模态的限制,高可靠地消除视觉惯导里程计的航向累计误差,提高对目标的航向估计精度。
技术研发人员:蒋静琦,胡君,郎小明,胡佳欣
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!