一种大时滞成型系统双模经济模型预测鲁棒控制方法与流程
1.本发明涉及一种大时滞成型系统双模经济模型预测鲁棒控制方法,属于控制算法应用领域范畴。
背景技术:
2.成型工业系统作为一种复杂的耦合非线性系统,对成型系统的精确可靠稳定控制一直是控制算法发展的关键问题。选取合适的控制算法,对提高成型系统控制的精度和准确性,提高成型质量的可靠性和高质量具有重要意义。
3.经济模型预测控制(empc)将一般成本性能指标结合到优化函数中,具有对所需经济成本在控制中直接优化的特性,使这种新型控制方法在成型工业生产系统中得到了广泛的应用。
4.由于现有empc方法多依赖于对系统的附加假设,也不能对任意经济目标进行优化,鲁棒性也尚待增强。当面对经济目标不满足强耗散性条件,成型系统与经济指标不具有turnpike性,外界干扰剧烈的情况下,传统的empc算法则难以对系统的稳定性进行分析。
5.成型系统中保证empc控制系统中的安全性是至关重要的。为了保证系统的安全稳定运行,可能需要强制系统状态保持在一个预先设计好的吸引域内或收敛到一个期望的平衡点附近,同时使给定的经济代价最小,这需要对现有empc控制算法进行进一步的改进。
技术实现要素:
6.本发明的目的在于提供一种大时滞成型系统双模经济模型预测鲁棒控制方法,克服背景技术中提到的不足。
7.为实现上述目的,本发明提供如下技术方案:
8.一种大时滞成型系统双模经济模型预测鲁棒控制方法,其特征在于,包括如下步骤:步骤1,根据成型系统标称模型设计辅助状态反馈控制率与控制李雅普诺夫函数;步骤2,所述empc控制器通过辅助状态反馈控制率计算成型系统的状态吸引域,并传到步骤3;;步骤3,所述empc控制器根据成型系统模型的固有特性和干扰信号幅值计算两种不同控制模式的使用范围,并传到步骤4;步骤4,所述empc控制器根据系统模型估计时延系统状态,并传到步骤5;;步骤5,所述empc控制器根据估计系统状态与反馈实际状态在辅助控制率约束下设计成型系统双模经济模型预测鲁棒控制器;
9.所述empc控制器根据成型系统标称模型和设定稳定点,通过非线性状态反馈法设计非线性状态反馈辅助控制率,并得到成型系统的控制李雅普诺夫函数;
10.所述empc控制器中使用的成型系统状态反馈控制率的设计方法的不同计算得到对应方法的系统状态吸引域。
11.所述empc控制器根据成型系统模型的lipschitz常数和干扰ω幅值计算出双模控制率的不同应用范围;
12.所述empc控制器中使用的成型系统时滞状态由以得到的系统状态和系统标称模型估计得到,用于求解empc控制器的经济最优控制问题;
13.所述empc控制器根据步骤4所估计系统状态与反馈实际状态在步骤2所得辅助控制率约束下设计成型系统双模经济模型预测鲁棒控制器,对受一定干扰的成型系统进行闭环控制。
附图说明
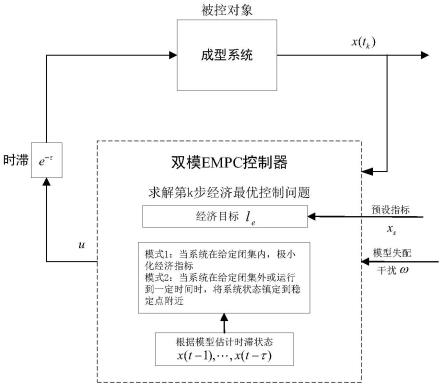
14.图1是本发明一种大时滞成型系统双模经济模型预测鲁棒控制方法的系统控制框图
具体实施方式
15.该系统由如下几个部分组成。底部是冷却槽。冷却水通过两个阀门从外部循环使用,保持稳定的冷却水温度。由电机以设定的速度将成型液料缓慢放入冷却槽中冷却。热风不断吹向冒口以保证模具上放安装的冒口漏斗中成型材料不会凝固。随着模具中材料的凝固,其体积减小,冒口漏斗中的成型材料可流入模具空隙中,防止产品出现缩松、空腔和裂纹。
16.成型系统的成型效果主要受温度影响,故在本示例中以冷却水槽的温度作为状态变量x,进出水阀的流量作为成型系统输入u。
17.设该成型系统模型为如下关系式:
18.考虑该成型系统无扰动标称模型利用为可根据该标称模型设计非线性系统辅助状态反馈控制率h(x)和一个控制李雅普诺夫函数v(x)。h(x)可以将状态在稳定点处镇定,即在h(x)作用下,闭环标称系统的一个控制李雅普诺夫函数v(x)的导数非正。
19.采用v(x)的一个水平集v(x)≤ρ表示标称模型在状态反馈控制率h(x)的吸引域,并计算得到一个尽可能大的ρ值对吸引域进行估计。
20.考虑系统与具有相同的初始状态,计算得到函数f
ω
满足以下不等式:|xa(t)-xb(t)|≤f
ω
(t-t0)其中,l
x
与l
ω
分别是f关于x和ω的lipschitz常数。
21.计算得到函数fv满足以下不等式:其中,fv=α4(α
1-1
(ρ))s+mvs2。mv为某正整数,函数α1、α4满足不等式α1(x)≤v(x),
22.采用v(x)的一个水平集表示empc控制器两种控制模式的切换区域,其中切换边界常数满足以下不等式:其中,n为当前时刻预测控制器的预测时域,δ为单位采样时间。
23.设当前时刻为tk,成型系统时滞时间为dk。令为系统的时滞估计状态,则初始状态
24.建立成型系统双模鲁棒empc最优控制问题如下所示:建立成型系统双模鲁棒empc最优控制问题如下所示:ui(t)∈ui,i=1,...m,i=1,...m,i=1,...m,i=1,...m其中,t'为预设的稳定时间。
25.解得当前时刻的最优控制序列[u1,
…
,um],取u1作为当前时刻输入量输入成型系统当中。接着,返回步骤四进行下一采样时刻运算。
[0026]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
技术特征:
1.一种大时滞成型系统双模经济模型预测鲁棒控制方法,其特征在于,包括如下步骤:步骤1,根据成型系统标称模型设计辅助状态反馈控制率与控制李雅普诺夫函数;步骤2,所述empc控制器通过辅助状态反馈控制率计算成型系统的状态吸引域,并传到步骤3;;步骤3,所述empc控制器根据成型系统模型的固有特性和干扰信号幅值计算两种不同控制模式的使用范围,并传到步骤4;步骤4,所述empc控制器根据系统模型估计时延系统状态,并传到步骤5;;步骤5,所述empc控制器根据估计系统状态与反馈实际状态在辅助控制率约束下设计成型系统双模经济模型预测鲁棒控制器。2.根据权利要求1所述一种大时滞成型系统双模经济模型预测鲁棒控制方法,其特征在于:步骤1所述根据成型系统标称模型和设定稳定点,通过非线性状态反馈法设计非线性状态反馈辅助控制率,并得到成型系统的控制李雅普诺夫函数。3.根据权利要求1所述一种大时滞成型系统双模经济模型预测鲁棒控制方法,其特征在于:步骤2所述empc控制器中的成型系统状态反馈控制率的设计方法的不同计算得到对应方法的系统状态吸引域。4.根据权利要求1所述一种大时滞成型系统双模经济模型预测鲁棒控制方法,其特征在于:步骤3所述所述empc控制器通过成型系统模型的lipschitz常数和干扰ω幅值计算出双模控制率的不同应用范围。5.根据权利要求1所述一种大时滞成型系统双模经济模型预测鲁棒控制方法,其特征在于:步骤4所述empc控制器中使用的成型系统时滞状态由以得到的系统状态和系统标称模型估计得到,用于求解empc控制器的经济最优控制问题。6.根据权利要求1所述一种大时滞成型系统双模经济模型预测鲁棒控制方法,其特征在于:步骤5所述所述empc控制器根据步骤4所估计系统状态与反馈实际状态在步骤2所得辅助控制率约束下设计成型系统双模经济模型预测鲁棒控制器,对受一定干扰的成型系统进行闭环控制。
技术总结
本发明涉及成型系统控制问题,其中主要涉及了一种鲁棒双模经济模型预测控制(EMPC)方法在成型系统中的应用。本发明针对成型系统具有非线性、大时滞、多干扰的特性和控制系统与实际系统相失配的问题,公开了一种大时滞成型系统双模经济模型预测鲁棒控制方法,通过双模控制方法在满足实际控制系统有界稳定的基础上实现经济性能的最优化。本发明的技术方案是,一种大时滞成型系统双模经济模型预测鲁棒控制方法,该方法主要包括如下步骤:1)根据成型系统标称模型设计辅助状态反馈控制率与控制李雅普诺夫函数;2)通过辅助状态反馈控制率计算成型系统的状态吸引域;3)根据成型系统模型的固有特性和干扰信号幅值计算两种不同控制模式的使用范围;4)根据系统模型估计时延系统状态5)根据估计系统状态与反馈实际状态在辅助控制率约束下设计成型系统双模经济模型预测鲁棒控制器。本发明设计的控制算法能在一定范围的扰动下实现成型系统控制的闭环有界稳定,并使闭环系统的经济性能达到最优。并使闭环系统的经济性能达到最优。并使闭环系统的经济性能达到最优。
技术研发人员:陈勇 潘尧杰 刘越智 黄求安 高丰 张龙杰 庄之樾
受保护的技术使用者:中国兵器装备集团自动化研究所有限公司
技术研发日:2022.05.09
技术公布日:2022/8/5
相关技术
网友询问留言
已有1条留言
-
 0188103... 来自[中国] 2022年09月07日 09:29这里面有没有实现代码?
0188103... 来自[中国] 2022年09月07日 09:29这里面有没有实现代码?
1