环境地图创建方法、装置、设备及可读存储介质与流程
本申请涉及人工智能,特别涉及一种环境地图创建方法、装置、设备及可读存储介质。
背景技术:
1、随着人工智能(artificial intelligence,ai)技术的飞速发展,各种智能机器人越来越多地进入人们的生活,给人们的生活带来极大的便利。常见的机器人包括扫地机器人、擦窗机器人等。
2、机器人进入陌生环境后,结合即时定位与地图构建(simultaneouslocalizationand mapping,slam)等技术构建环境地图。后续基于环境地图规划清扫路径等并执行清扫任务。建图过程中,机器人在墙边沿边行进,利用传感器感知外部环境并创建环境地图。
3、经验证发现:上述创建环境地图的速度慢、质量差。
技术实现思路
1、本申请提供一种环境地图创建方法、装置、设备及可读存储介质,自移动设备依次建立每个房间的局部地图并标记出分叉口。建立完各个房间的局部地图后,依次建立每个分叉口对应的第一未知区域的局部地图,实现快速建立环境地图并提高环境地图的质量的目的。
2、第一方面,本申请实施例提供一种环境地图创建方法,应用于自移动设备,所述方法包括:
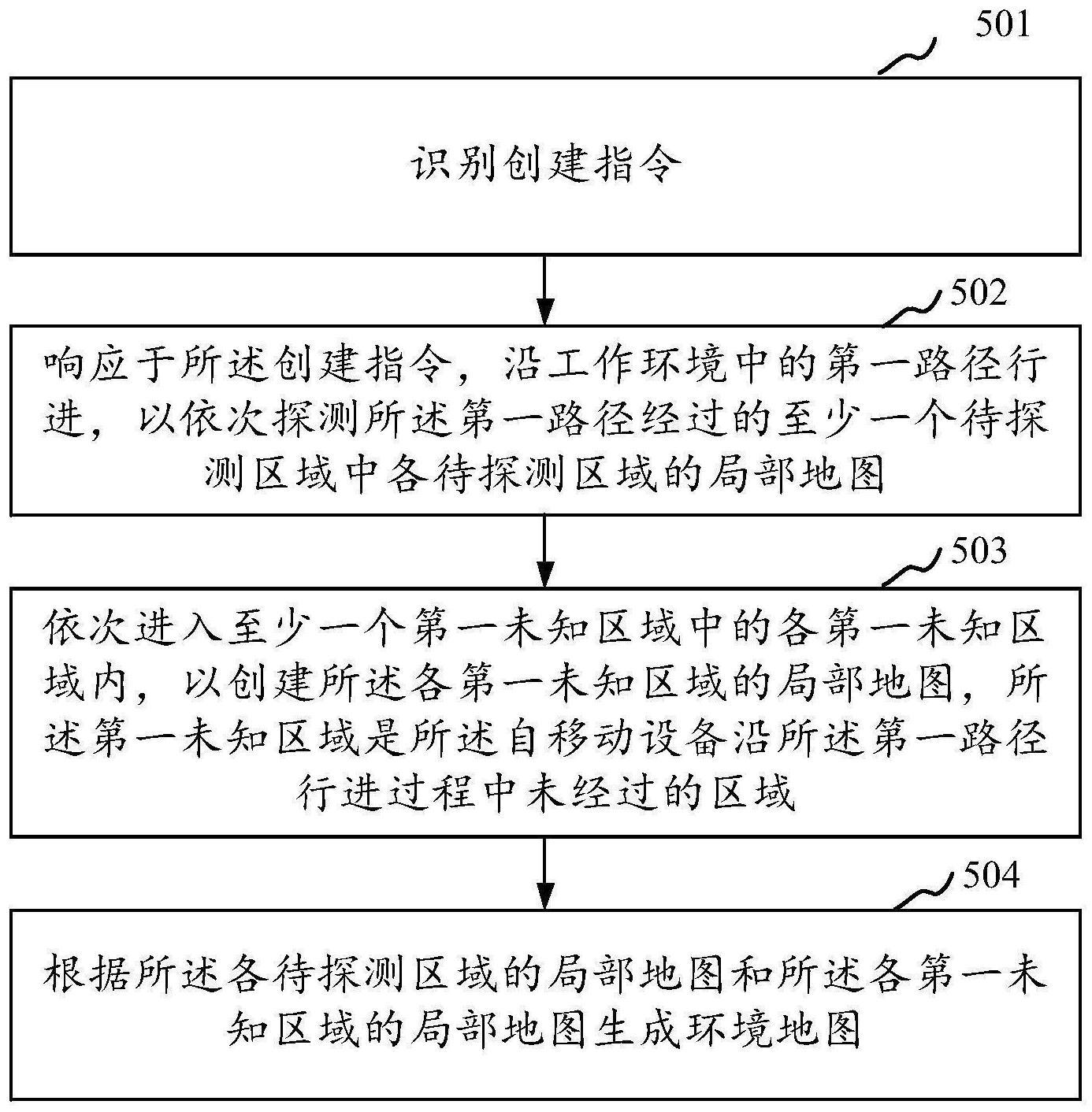
3、识别创建指令;
4、响应于所述创建指令,沿工作环境中的第一路径行进,以依次探测所述第一路径经过的至少一个待探测区域中各待探测区域的局部地图;
5、依次进入至少一个第一未知区域中的各第一未知区域内,以创建所述各第一未知区域的局部地图,所述第一未知区域是所述自移动设备沿所述第一路径行进过程中未经过的区域;
6、根据所述各待探测区域的局部地图和所述各第一未知区域的局部地图生成环境地图。
7、第二方面,本申请实施例提供一种自移动设备,包括:
8、设备本体;
9、撞板,所述撞板可拆卸安装在所述设备本体上,所述撞板上设置窗口;
10、三维传感器,设置在所述设备本体上与所述窗口对应的位置处,用于采集三维环境数据;
11、存储器和处理器,设置在所述设备本体上;
12、所述存储器,用于存储计算机程序;
13、所述处理器与所述存储器耦合,用于执行所述存储器中的计算机程序以使得所述自移动设备实现如上第一方面或第一方面各种可能的实现方式所述的方法。
14、第三方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机指令,所述计算机指令在被处理器执行时用于实现如上第一方面或第一方面各种可能的实现方式所述的方法。
15、第四方面,本申请实施例提供一种包含计算程序的计算机程序产品,所述计算机程序被处理器执行时实现如上第一方面或第一方面各种可能的实现方式所述的方法。
16、本申请实施例提供的环境地图创建方法、装置、设备及可读存储介质,自移动设备识别出创建指令后,响应该创建指令,先依次创建各个待探测区域的局部地图并标记出第一未知区域,然后依次进入并创建第一未知区域的局部地图。最后合并各待探测区域的局部地图和各个第一未知区域的局部地图从而得到环境地图。采用该种方案,自移动设备先了解全貌建立每个待探测区域的局部地图,再逐个击破建立每个第一未知区域的局部地图,实现快速建立环境地图并提高环境地图的质量的目的。
技术特征:
1.一种环境地图创建方法,其特征在于,应用于自移动设备,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述依次进入至少一个第一未知区域中的各第一未知区域内,以创建所述各第一未知区域的局部地图,包括:
3.根据权利要求2所述的方法,其特征在于,所述在所述空旷位置原地旋转至少一周以建立所述第一未知区域的局部地图,包括:
4.根据权利要求1-3任一项所述的方法,其特征在于,所述依次进入至少一个第一未知区域中的各第一未知区域内,以创建所述各第一未知区域的局部地图,包括:
5.根据权利要求1-3任一项所述的方法,其特征在于,所述依次进入至少一个第一未知区域中的各第一未知区域内,以创建所述各第一未知区域的局部地图,包括:
6.根据权利要求1-3任一项所述的方法,其特征在于,所述响应于所述创建指令,沿工作环境中的第一路径行进,以依次探测所述第一路径经过的至少一个待探测区域中各待探测区域的局部地图,包括:
7.根据权利要求1-3任一项所述的方法,其特征在于,所述根据所述各待探测区域的局部地图和所述各第一未知区域的局部地图生成环境地图之后,还包括:
8.根据权利要求7所述的方法,其特征在于,所述当所述分区存在扩建边界时,对所述分区执行完区域内清扫后经由所述扩建边界行进至第二未知区域,包括:
9.根据权利要求7所述的方法,其特征在于,所述根据所述第二未知区域的局部地图更新所述环境地图,包括:
10.根据权利要求7所述的方法,其特征在于,所述根据所述第二未知区域的局部地图更新所述环境地图,包括:
11.根据权利要求1-3任一项所述的方法,其特征在于,所述根据所述各待探测区域的局部地图和所述各第一未知区域的局部地图生成环境地图,包括:
12.根据权利要求1-3任一项所述的方法,其特征在于,所述响应于所述创建指令,沿工作环境中的第一路径行进,以依次探测所述第一路径经过的至少一个待探测区域中各待探测区域的局部地图之前,还包括:
13.一种自移动设备,其特征在于,包括:
14.根据权利要求13所述的设备,其特征在于,
技术总结
本申请公开了一种环境地图创建方法、装置、设备及可读存储介质,自移动设备识别出创建指令后,响应该创建指令,先依次创建各个待探测区域的局部地图并标记出第一未知区域,然后依次进入并创建第一未知区域的局部地图。最后合并各待探测区域的局部地图和各个第一未知区域的局部地图从而得到环境地图。采用该种方案,自移动设备先了解全貌建立每个待探测区域的局部地图,再逐个击破建立每个第一未知区域的局部地图,实现快速建立环境地图并提高环境地图的质量的目的。
技术研发人员:饶铸,姜家鑫,单俊杰,尹慧慧
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!