一种行进控制方法和自动导引小车与流程
本申请涉及机械控制,特别是涉及一种行进控制方法和自动导引小车。
背景技术:
1、区别于传统的制造工厂,现代的工厂更趋向于智能化。就比如,目前工厂的电路板的板件续流和材料运输,都是使用较为先进的agv(automated guided vehicle,自动导引车)小车,这不但提高了工厂的运输效率,而且还降低了工人的劳动强度。
2、然而,现有的agv小车在行驶过程中,通常存在不少安全隐患,比如,在发现前方有障碍物时,agv小车通常不能作出预警指示,提醒生产人员避让,而是继续缓慢前行,直至停止,而这样一来便会导致给生产人员带来绊倒风险,且降低了工厂的运输效率。此外,在agv小车托运的物品尺寸大于车体本身时,尤其是托运物品的宽度大于车体宽度时,因agv小车只会根据车前方的两条感应线来判断前方有无障碍物,从而决定是否继续前行,而这便会造成因车前方的生产人员虽未在感应线区间,而在小车所运物品的前方时,小车未能判断出前方有障碍物,并继续前行,以致小车上的物品撞到不知情的生产人员,引发物品摔落甚至人员受伤的事故。
技术实现思路
1、本申请主要解决的技术问题是提供一种行进控制方法和自动导引小车,以解决现有技术中agv小车的行进控制方法不能有效规避待运物品前方的障碍物,以致存在物品摔落甚至人员受伤风险的问题。
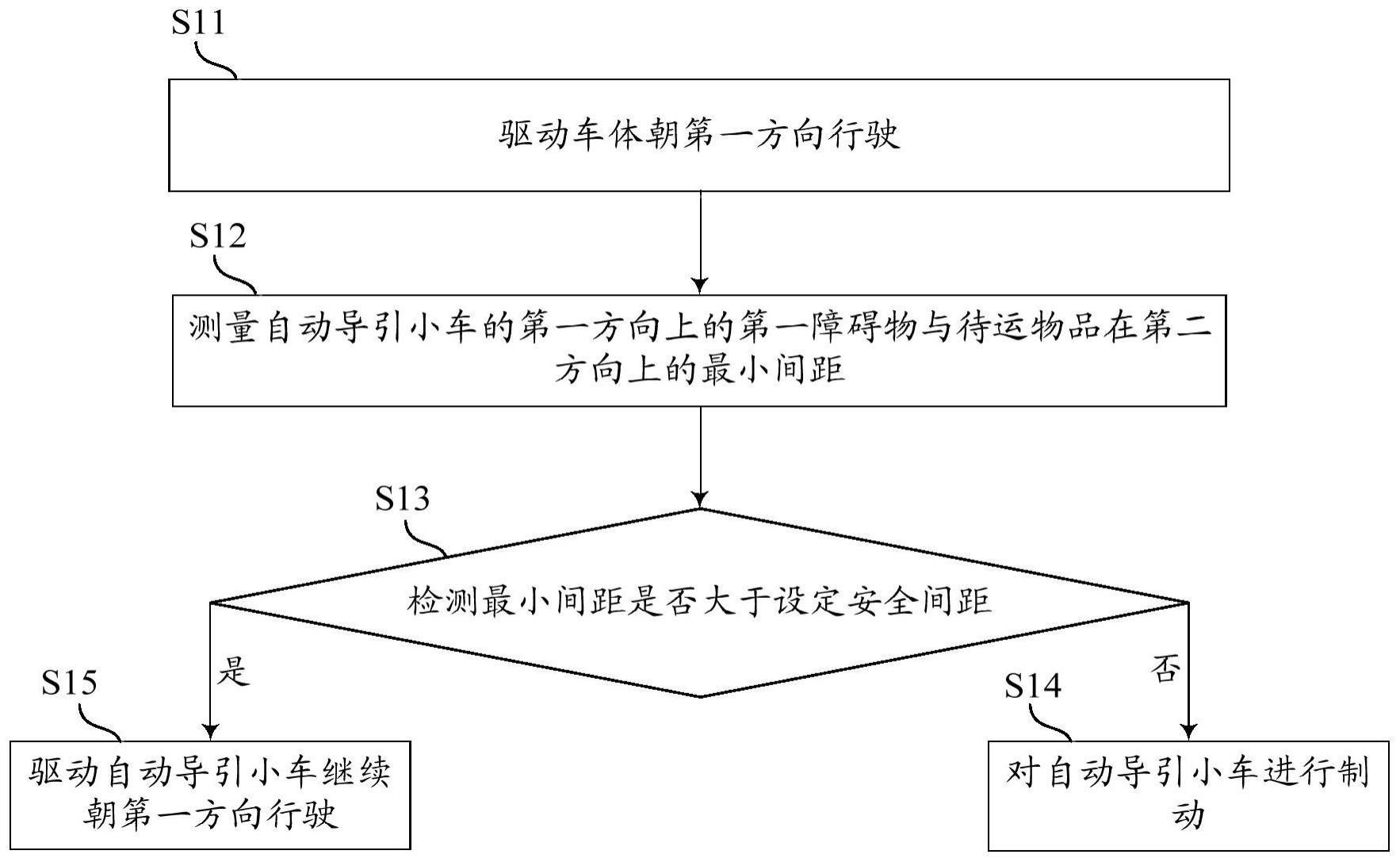
2、为了解决上述问题,本申请第一方面提供了一种自动导引小车的行进控制方法,该自动导引小车的车体上装载有待运物品,其中,该行进控制方法包括:驱动车体朝第一方向行驶;测量自动导引小车的第一方向上的第一障碍物与待运物品在第二方向上的最小间距;其中,第二方向垂直第一方向;检测最小间距是否大于设定安全间距;响应于最小间距不大于设定安全间距,对自动导引小车进行制动。
3、其中,行进控制方法还包括:响应于最小间距大于设定安全间距,驱动自动导引小车继续朝第一方向行驶。
4、其中,测量自动导引小车的第一方向上的第一障碍物与待运物品在第二方向上的最小间距的步骤包括:测量待运物品的第一侧与自动导引小车的基准点在第二方向上的第一间距;测量待运物品的第二侧与自动导引小车的基准点在第二方向上的第二间距;其中,第一侧和第二侧为待运物品的相对两侧;测量自动导引小车的第二方向上的第一障碍物与基准点在第二方向上的第三间距;根据第一间距和第二间距中的一个和第三间距计算得到最小间距;其中,在第二方向上第一障碍物与第一侧位于基准点的同侧时,采用第三间距减去第一间距得到最小间距,在第二方向上第一障碍物与第二侧位于基准点的同侧时,采用第三间距减去第二间距得到最小间距。
5、其中,驱动自动导引小车朝第一方向行驶的步骤之后,测量自动导引小车的第一方向上的第一障碍物与待运物品在第二方向上的最小间距的步骤之前,还包括:获取自动导引小车的第一方向上的第一拍摄图像;基于第一拍摄图像判断自动导引小车的第一方向上是否出现第一障碍物;测量第一方向上的第一障碍物与待运物品在第二方向上的最小间距的步骤包括:响应于自动导引小车的第一方向上出现第一障碍物,发出告警指示,并测量第一障碍物与待运物品在第二方向上的最小间距。
6、其中,测量自动导引小车的第一方向上的第一障碍物与待运物品在第二方向上的最小间距的步骤包括:向自动导引小车的第一方向上的第一障碍物发射激光,以接收第一障碍物返回的反射光;基于发射和接收激光的时间间隔及发射激光的方向与第一方向的夹角计算得到第一障碍物与待运物品在第二方向上的最小间距。
7、其中,驱动自动导引小车朝第一方向行驶的步骤包括:对设于设定轨道上的行进标识进行识别,以在识别行进标识有效时,驱动自动导引小车沿设定轨道朝第一方向行驶。
8、其中,响应于最小间距大于设定安全间距,驱动自动导引小车继续朝第一方向行驶的步骤之后,还包括:获取自动导引小车的360°视角范围的第二拍摄图像;基于第二拍摄图像判断是否存在有第二障碍物靠近自动导引小车运动;响应于存在第二障碍物靠近自动导引小车运动,发出告警指示,并控制自动导引小车加速或减速行驶,以规避第二障碍物。
9、其中,设定安全间距为10-20厘米。
10、为了解决上述问题,本申请第二方面提供了一种自动导引小车,其中,该自动导引小车包括:车体,车体用于装载待运物品;控制器,控制器耦接车体,以驱动车体朝第一方向行驶;测量仪,测量仪耦接控制器,测量仪接收控制器发送的测量指令,以测量自动导引小车的第一方向上的第一障碍物与待运物品在第二方向上的最小间距,以将最小间距发送给控制器,以使控制器在检测到最小间距大于设定安全间距时,对自动导引小车进行制动;其中,第二方向垂直第一方向。
11、其中,自动导引小车还包括摄像头,摄像头耦接控制器,摄像头用于朝自动导引小车的第一方向进行拍摄,以将对应得到的第一拍摄图像发送给控制器,以使控制器基于第一拍摄图像判断自动导引小车的第一方向上是否出现第一障碍物,并在确定自动导引小车的第一方向上出现第一障碍物时,控制测量仪测量第一障碍物与待运物品在第二方向上的最小间距。
12、本发明的有益效果是:区别于现有技术的情况,本申请提供的自动导引小车的行进控制方法在驱动车体朝第一方向行驶时,通过测量自动导引小车的第一方向上的第一障碍物与待运物品在第二方向上的最小间距,以检测该最小间距是否大于设定安全间距,并在该最小间距不大于设定安全间距时,对自动导引小车进行制动,从而能够在自动导引小车的第一方向上出现影响行驶的第一障碍物时,及时对其进行制动,以规避即将发生的碰撞,从而能够有效规避可能存在的物品摔落甚至人员受伤的风险。
技术特征:
1.一种自动导引小车的行进控制方法,所述自动导引小车的车体上装载有待运物品,其特征在于,所述行进控制方法包括:
2.根据权利要求1所述的行进控制方法,其特征在于,所述行进控制方法还包括:
3.根据权利要求1所述的行进控制方法,其特征在于,所述测量所述自动导引小车的所述第一方向上的第一障碍物与所述待运物品在第二方向上的最小间距的步骤包括:
4.根据权利要求1所述的行进控制方法,其特征在于,所述驱动所述自动导引小车朝第一方向行驶的步骤之后,所述测量所述自动导引小车的所述第一方向上的第一障碍物与所述待运物品在第二方向上的最小间距的步骤之前,还包括:
5.根据权利要求1所述的行进控制方法,其特征在于,所述测量所述自动导引小车的所述第一方向上的第一障碍物与所述待运物品在第二方向上的最小间距的步骤包括:
6.根据权利要求1所述的行进控制方法,其特征在于,所述驱动所述自动导引小车朝第一方向行驶的步骤包括:
7.根据权利要求1所述的行进控制方法,其特征在于,所述响应于所述最小间距大于所述设定安全间距,驱动所述自动导引小车继续朝所述第一方向行驶的步骤之后,还包括:
8.根据权利要求1-7中任一项所述的行进控制方法,其特征在于,所述设定安全间距为10-20厘米。
9.一种自动导引小车,其特征在于,所述自动导引小车包括:
10.根据权利要求9所述的自动导引小车,其特征在于,
技术总结
本申请公开了一种行进控制方法和自动导引小车,该行进控制方法包括:驱动车体朝第一方向行驶;测量自动导引小车的第一方向上的第一障碍物与待运物品在第二方向上的最小间距;其中,第二方向垂直第一方向;检测最小间距是否大于设定安全间距;响应于最小间距不大于设定安全间距,对自动导引小车进行制动。通过上述方案,本申请中的行进控制方法能够在自动导引小车的第一方向上出现影响行驶的第一障碍物时,及时进行制动,以规避即将发生的碰撞,从而能够有效规避可能存在的物品摔落甚至人员受伤的风险。
技术研发人员:石文锐,周江,窦梦显,顾海丰
受保护的技术使用者:无锡深南电路有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!