一种飞走式巡线机器人柔索环境下滑移反向约束控制方法
本发明涉及飞走式巡线机器人系统控制,尤其涉及一种柔索环境下滑移反向约束控制方法。
背景技术:
1、用于电力巡检的飞走式巡线机器人通过飞行悬挂到电力线上,沿呈悬链状弹性线缆长距离滑移。受机器人自重引起的柔索形变及高空风摆等环境因素干扰,使机器人在线上行走时会发生打滑现象,严重影响机器人的行走性能和巡检质量。此时,需要通过自动精细调节压紧机构产生的压力以抑制行走打滑,否则压力过大会降低行走速度,影响机器人工作效率;压力太小则不能良好的抑制打滑。并且,在上坡时随着行走过程的推进,机器人沿电力线的倾角会随之增加,加大对压紧力的需求。
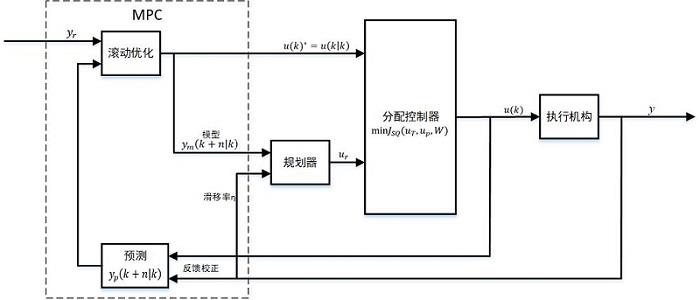
2、多变量模型预测控制,是一种局部最优算法,常用于机器人控制。该算法通过预测模型、反馈校正和滚动优化在每个时刻通过某一性能指标的最优化,确定对未来的控制作用。它采用基于脉冲响应的非参数模型作为内部模型,以过去和未来的输入输出状态预测系统未来的输出状态,对内部模型的输出误差进行反馈校正后,与预设轨迹比较,应用二次型性能指标进行滚动优化,然后再计算当前时刻加于系统的控制,从而完成整个动作循环。
3、对于多变量模型预测控制系统,虽然系统每一时刻的控制量对于当前时刻都是最优的,但是,该算法并不能有效处理反向约束的问题。对于飞走式巡线机器人在柔索环境下,需要将压紧力迅速精准控制在一个合适的范围,即根据滑移率η的值动态调整实际输入。而滑移率受当前时刻多个输出之间数值关系的影响,构成该控制系统的输出反向约束。因此,通常的多变量模型预测控制难以直接使用或者取得良好的控制效果,基于此,本发明提出了一种基于反向约束的遗传算法多变量模型预测控制的分层控制方法,解决多输入多输出系统中存在的反向约束分层控制问题。
技术实现思路
1、针对在飞走式巡线机器人多输入多输出控制系统中存在反向约束的问题,本发明提出了一种适用于多变量模型预测控制的反向约束控制实现方法。
2、本发明采取如下技术方案。
3、一种飞走式巡线机器人柔性导向空间下滑移方向约束控制方法,包括:
4、定义飞走式巡线机器人的多变量模型预测控制系统的状态变量,建立多变量模型预测的状态变量方程模型;
5、对所述状态变量方程模型进行模型预测控制。
6、建立模型预测控制的目标函数,通过遗传算法求解所述目标函数的最优解,得到多变量模型预测控制的参考输入;
7、利用所述参考输入,对多变量模型预测控制的真实输入量进行控制分配。
8、进一步地,所述的定义多变量模型预测控制系统的状态变量,建立多变量模型预测控制系统的状态变量方程模型,包括:
9、定义基于飞走式巡线机器人的多变量模型预测控制系统的状态变量x,如下:
10、x=[x1,x2]t=[x,v]t, (1)
11、其中,x1表示线上行走的位移x,x2表示线上行走的速度v;
12、对于整个多变量模型预测控制系统,其控制输入量为驱动电机输出转矩t和压紧电机压紧力p,建立多变量模型预测控制的状态变量方程模型如下:
13、
14、式中,m为无人机质量,ε为摩擦系数,g为重力加速度,θ为无人机倾角,r为主动轮半径,其中,无人机倾角以正弦函数的方式作为干扰量,即
15、进一步的,所述的对所述状态变量方程模型进行模型预测控制,建立模型预测控制的目标函数,通过遗传算法求解所述目标函数的最优解,得到模型预测控制系统的参考输入,包括:
16、对所述的控制系统进行离散化,得到离散化模型,导出所述离散化模型预测导出的预测输出量。
17、将所述预测输出量与目标输出量进行比较,建立模型预测控制的目标函数,通过遗传算法求解所述目标函数的最优解,得到控制输入的参考输入,包括:
18、定义多变量模型输入的输出变量,包括:
19、y=[y1 y2 y3 y4]t=[x,v,ω1,ω2]t, (3)
20、其中,y1表示线上行走的位移x,y2表示线上行走的速度v,y3表示主动轮的角速度ω1,y4表示从动轮的角速度ω2;
21、每个控制周期内,通过比较控制器的输出信号值,得到实际滑移率η=y3/y4;
22、每个控制周期内,将滑移率作为约束之一建立模型预测控制的目标函数,通过遗传算法求解所述目标函数的最优解,得到多变量模型预测控制系统的参考输入,包括:
23、所述模型预测控制系统地状态空间方程为:
24、
25、其中,x1表示线上行走的位移x,x2表示线上行走的速度v,u1表示驱动电机转矩t,u1表示压紧电机压紧力p,ωi表示扰动量;另外,系数矩阵a,b分别为:
26、
27、将所述状态空间方程进行离散化,将所述离散化模型预测导出地预测输出量与目标输出量进行比较,建立模型预测控制的目标函数,通过遗传算法求解所述目标函数的最优解,得到控制输入的控制律,从而得到多变量模型预测算法的参考输入。包括:
28、机器人不打滑的压紧力需求为:
29、
30、对于模型预测控制的目标函数集:
31、
32、通过遗传算法求解最优控制律,包括:
33、建立基于遗传算法求解的约束域:
34、
35、通过遗传算法求得最优解。
36、进一步地,所述地利用遗传算法求得的最优控制律,对模型预测控制系统地真实输入量进行控制分配,包括:
37、建立多变量模型预测控制系统的真实输入量进行控制分配的目标函数为:
38、
39、
40、其中,[t-,t+]、[p-,p+]分别为驱动电机的输出扭矩约束条件和压紧电机的输出压力约束条件,λt,λp分别为两个变量的权重系数矩阵;
41、通过序列二次规划的方法求解所述目标函数的最优解,得到多变量模型预测控制系统的驱动电机扭矩与压紧电机输出压力的最优匹配控制量,通过驱动电机扭矩与压紧电机输出压力的最优匹配控制量与多变量模型预测控制系统的真实输入量进行控制分配。
技术特征:
1.一种飞走式巡线机器人柔索环境下滑移反向约束控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,对所述飞走式巡线机器人定义的多变量模型预测控制的状态变量,建立多变量模型预测控制的状态变量方程模型,包括:
3.根据权利要求2所述的方法,其特征在于,对所述状态变量方程进行模型预测控制,每个控制周期内,当机器人沿呈悬链状弹性线缆长距离移动时,受机器人自重引起的柔索形变及高空风摆等环境因素干扰,使机器人在线上行走时发生打滑现象;通过比较控制系统的输出信号值,可得到实际滑移率;每个控制周期内,比较实际滑移率与目标滑移率,建立以滑移率为约束之一的目标函数,通过遗传算法求解所述目标函数的最优解,得到多变量模型预测控制系统的参考输入,包括:
4.根据权利要求3所述的方法,其特征在于,对所述离散化模型导出的预测输出与目标输出建立预测模型控制的目标函数,通过将滑移率作为约束条件之一进行多目标规划,通过遗传算法求解所述目标函数的最优解,从而得到多变量控制系统的参考输入,包括:
5.根据权利要求4所述的方法,其特征在于,所述的利用所述多变量模型预测控制的参考输入对多变量模型预测控制系统的真实输入量进行控制分配,包括:
技术总结
本发明提出一种适用于飞走式巡线机器人柔索环境下滑移反向约束控制方法,该方法包括:建立飞走式巡线机器人的多变量模型预测控制的状态变量方程模型,对所述状态方程模型进行模型预测控制;每个控制周期内,比较控制器输出信号值,得到滑移率,将滑移率作为目标函数的约束之一,构成滑移率对控制系统的反向约束,通过遗传算法规划器求解所述目标函数的最优解,得到多变量模型预测控制的参考输入;利用所述参考输入,对多变量模型预测控制的真实输入进行控制分配。本发明提出的方法可用于模型预测控制系统的输入控制,有效的解决多变量模型预测控制系统中存在的反向约束的问题,提高了模型预测控制器的适用范围。
技术研发人员:秦新燕,冯天明,雷金,李惠东,李博,张杰,李兆钧,王艳琦,王德新
受保护的技术使用者:石河子大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!