一种可移动设备的脱困方法、装置、设备及存储介质与流程
本申请涉及控制,尤其涉及一种可移动设备的脱困方法、装置、设备及存储介质。
背景技术:
1、随着计算机技术和人工智能技术的飞速发展,智能机器人等可移动设备逐渐走进人们的生活和工作场景中,智能机器人可以替人们做一些简单的工作,使用户生活或工作更加便利,实现省时省力。
2、但是,由于环境的复杂,可移动设备在工作过程中,通常会通过传感器来检测当前所在位置,若确定当前所在位置处于一个封闭区域时,可移动设备为了降低电量的消耗,通常会立即停止工作,导致可移动设备的工作效率降低。
3、申请内容
4、为解决上述技术问题,本申请实施例期望提供一种可移动设备的脱困方法、装置、设备及存储介质,解决了目前可移动设备容易被困住,不能主动脱困的问题,提出了一种可移动设备的脱困方法,保证了在检测到当前位置处于封闭区域时,主动寻找出口,实现脱困,提高了可移动设备的工作效率。
5、本申请的技术方案是这样实现的:
6、第一方面,一种可移动设备的脱困方法,所述方法包括:
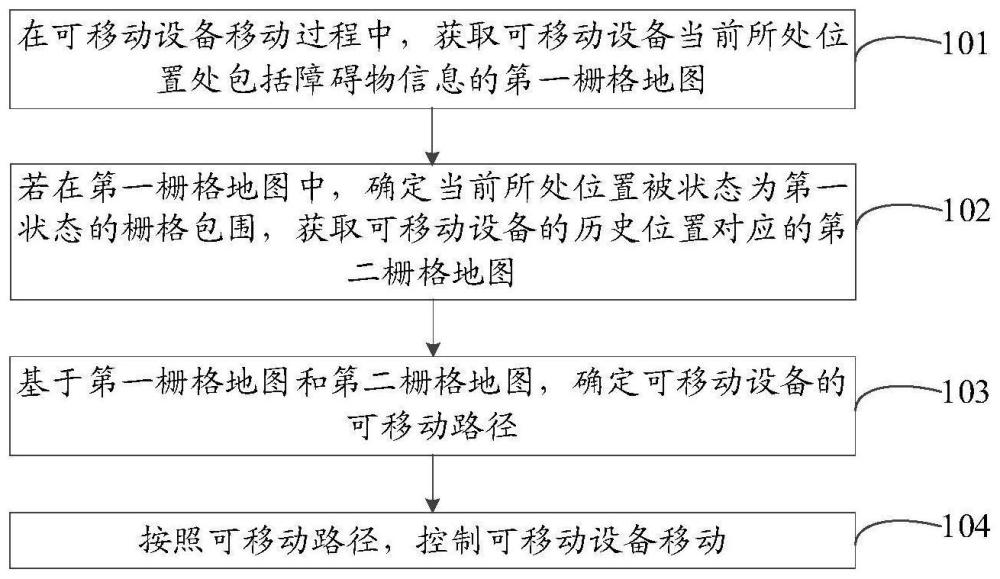
7、在可移动设备移动过程中,获取所述可移动设备当前所处位置处包括障碍物信息的第一栅格地图;
8、若在所述第一栅格地图中,确定所述当前所处位置被状态为第一状态的栅格包围,获取所述可移动设备的历史位置对应的第二栅格地图;其中,所述历史位置为所述可移动设备移动至所述当前位置之前所处的至少一个位置;
9、基于所述第一栅格地图和所述第二栅格地图,确定所述可移动设备的可移动路径;
10、按照所述可移动路径,控制所述可移动设备移动。
11、第二方面,一种可移动设备的脱困装置,所述装置包括:第一获取单元、第二获取单元、确定单元和控制单元;其中:
12、所述第一获取单元,用于在可移动设备移动过程中,获取所述可移动设备当前所处位置处包括障碍物信息的第一栅格地图;
13、所述第二获取单元,用于若在所述第一栅格地图中,确定所述当前所处位置被状态为第一状态的栅格包围,获取所述可移动设备的历史位置对应的第二栅格地图;其中,所述历史位置为所述可移动设备移动至所述当前位置之前所处的至少一个位置;
14、所述确定单元,用于基于所述第一栅格地图和所述第二栅格地图,确定所述可移动设备的可移动路径;
15、所述控制单元,用于按照所述可移动路径,控制所述可移动设备移动。
16、第三方面,一种可移动设备,所述设备包括:如上述所述的可移动设备的脱困装置和用于实现所述可移动设备的可移动功能的可移动装置。
17、第四方面,一种存储介质,所述存储介质上存储有设备脱困程序,所述设备脱困程序被处理器执行时实现如上述任一项所述的可移动设备的脱困方法的步骤。
18、本申请实施例中,在可移动设备移动过程中,通过获取可移动设备当前所处位置处包括的障碍物信息的第一栅格地图后,若在第一栅格地图中,确定当前所处位置被状态为第一状态的栅格包围,获取可移动设备的历史位置对应的第二栅格地图,并基于第一栅格地图和第二栅格地图,确定可移动设备的可移动路径,最后按照可移动路径,控制可移动设备移动。这样,对可移动设备移动过程中,获取到的可探测范围内的包括障碍物信息的第一栅格地图表示可移动设备被第一状态的栅格包围时,根据第一栅格地图和历史位置对应的第二栅格地图来确定可移动设备的可移动路径,解决了目前可移动设备容易被困住,不能主动脱困的问题,提出了一种可移动设备的脱困方法,保证了在检测到当前位置处于封闭区域时,主动寻找出口,实现脱困,提高了可移动设备的工作效率。
技术实现思路
技术特征:
1.一种可移动设备的脱困方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述在可移动设备移动过程中,获取所述可移动设备当前所处位置处包括障碍物信息的第一栅格地图,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述环境信息,确定所述第一栅格地图上每一栅格的第一参考状态,包括:
4.根据权利要求1所述的方法,其特征在于,所述基于所述第一栅格地图和所述第二栅格地图,确定所述可移动设备的可移动路径,包括:
5.根据权利要求4所述的方法,其特征在于,所述将所述第一栅格地图和所述第二栅格地图进行融合处理,得到目标地图,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述第一栅格地图的所述第三区域中栅格的第一参考状态和所述第二栅格地图的所述第三区域中栅格的第二参考状态,确定所述目标地图的所述第三区域的第三目标状态,包括:
7.根据权利要求4至6任一项所述的方法,其特征在于,所述基于所述目标地图,确定所述可移动设备的所述可移动路径,包括:
8.根据权利要求7所述的方法,其特征在于,所述基于所述当前所处位置对应的起始栅格、所述第一目标栅格和所述第二目标栅格,确定所述可移动路径,确定所述可移动路径,包括:
9.根据权利要求7所述的方法,其特征在于,所述方法还包括:
10.一种可移动设备的脱困装置,其特征在于,所述装置包括:第一获取单元、第二获取单元、确定单元和控制单元;其中:
11.一种可移动设备,其特征在于,所述设备包括:如权利要求10所述的可移动设备的脱困装置和用于实现所述可移动设备的可移动功能的可移动装置。
12.一种存储介质,其特征在于,所述存储介质上存储有设备脱困程序,所述设备脱困程序被处理器执行时实现如权利要求1至9中任一项所述的可移动设备的脱困方法的步骤。
技术总结
本申请实施例公开了一种可移动设备的脱困方法,方法包括:在可移动设备移动过程中,获取所述可移动设备当前所处位置处包括障碍物信息的第一栅格地图;若在所述第一栅格地图中,确定所述当前所处位置被状态为第一状态的栅格包围,获取所述可移动设备的历史位置对应的第二栅格地图;其中,所述历史位置为所述可移动设备移动至所述当前位置之前所处的至少一个位置;基于所述第一栅格地图和所述第二栅格地图,确定所述可移动设备的可移动路径;按照所述可移动路径,控制所述可移动设备移动。本申请实施例还公开了一种可移动设备的脱困装置、设备和存储介质。
技术研发人员:霍伟明,张金祥
受保护的技术使用者:广东美的制冷设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!