一种基于视觉辅助的无人机撞网回收方法及撞网回收装置与流程
本发明涉及无人飞行器回收降落,尤其涉及一种基于视觉辅助的无人机撞网回收方法及撞网回收装置。
背景技术:
1、目前,撞网回收过程中无人飞行器的末端精确引导技术主要有雷达引导、激光引导、gps引导以及gps/ins/电视跟踪的组合引导等。其中,激光导引和雷达引导的方式需要在无人飞行器及回收装置上设置相应的探测接收装置,价格昂贵;gps引导则需要利用差分gps技术由飞机给出自身目标位置数据,再结合回收网位置在线规划形成飞行航迹以实现回收;gps/ins/电视跟踪的组合引导方式综合了组合导航定位和跟踪的优点,需要人在回路中实现撞网操作,并且需要在无人飞行器上设置相应的光学导引装置。
2、而对于轻小型无人飞行器如筒式发射的小型折叠翼无人飞行器来说,其重量一般限制在数公斤到几十公斤之间,载机平台重量越轻,对机上的回收导引装置的重量和尺寸要求越高,因此,在实际应用中轻小型无人飞行器,尤其是筒式发射布局的无人平台,能分配给机上回收导引部分的重量和空间非常有限,导致现有的导引技术无法应用。
技术实现思路
1、为了解决现有技术中存在的问题之一,本发明提供了一种基于视觉辅助的无人机撞网回收方法及撞网回收装置。
2、根据本发明的一方面,提供了一种基于视觉辅助的无人机撞网回收方法,回收方法包括:
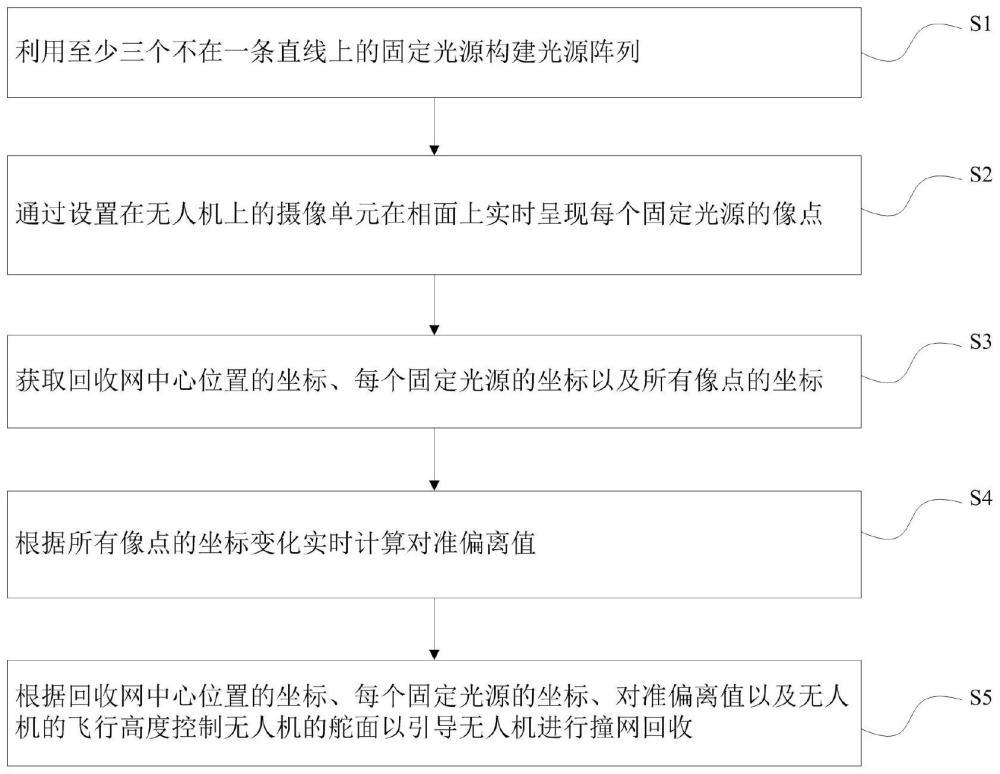
3、利用至少三个不在一条直线上的固定光源构建光源阵列;
4、通过设置在无人机上的摄像单元在相面上实时呈现每个固定光源的像点;
5、获取回收网中心位置的坐标、每个固定光源的坐标以及所有像点的坐标;
6、根据所有像点的坐标变化实时计算对准偏离值;
7、根据回收网中心位置的坐标、每个固定光源的坐标、对准偏离值以及无人机的飞行高度控制无人机的舵面以引导无人机进行撞网回收。
8、进一步地,获取所有像点的坐标包括:
9、获取所有像点的在相面坐标系中的坐标;
10、根据像点在相面坐标系中的坐标以及摄像单元的光轴与机体坐标系的夹角计算得到所有像点在机体坐标系中的坐标;
11、根据像点在机体坐标系中的坐标转换得到所有像点在惯性坐标系中的坐标。
12、进一步地,根据所有像点的坐标变化实时计算对准偏离值包括:
13、根据所有像点在惯性坐标系中的坐标实时计算得到所有像点构成的像点阵列的第一重心的坐标;
14、根据第一重心的坐标变化实时计算得到对准偏离值。
15、进一步地,根据回收网中心位置的坐标、每个固定光源的坐标、对准偏离值以及无人机的飞行高度控制无人机的舵面以引导无人机进行撞网回收包括:
16、根据每个固定光源的坐标计算得到光源阵列的第二重心的坐标;
17、根据回收网中心位置的坐标和第二重心的坐标计算得到回收网中心位置与第二重心的相对位置关系;
18、根据相对位置关系、对准偏离值以及无人机的飞行高度控制无人机的舵面以引导无人机进行撞网回收。
19、根据本发明的另一方面,提供了一种无人机撞网回收装置,回收装置包括:
20、光源阵列,光源阵列包括至少三个不在一条直线上的固定光源;
21、摄像单元,摄像单元设置在无人机上,用于在相面上实时呈现每个固定光源的像点;
22、信息处理单元,信息处理单元用于获取所有像点的坐标以及根据所有像点的坐标变化实时计算对准偏离值;
23、飞控单元,飞控单元用于获取回收网中心位置的坐标和每个固定光源的坐标,以及根据回收网中心位置的坐标、每个固定光源的坐标、对准偏离值以及无人机的飞行高度控制无人机的舵面以引导无人机进行撞网回收。
24、进一步地,固定光源选用近红外光源。
25、进一步地,固定光源选用激光光源。
26、进一步地,激光光源的功率通过以下公式确定:
27、
28、上式中,p表示激光光源的功率,r表示预设回收距离,ed表示摄像单元的光电阴极的平均照度的灵敏度阈值,sg表示摄像单元的光电阴极的面积,θ表示激光光源的发射视场角,α表示激光光源的激光脉冲占空比,η表示激光光源的电源调制效率,ρ表示反射率,k表示激光光源的光视效能,ε表示激光光源的光学透过率,τ表示摄像单元的光学透过率,d表示摄像单元的镜头直径,μ表示大气消光系数,exp(-2μr)表示大气透过率,ω表示摄像单元的接收视场角。
29、进一步地,光源阵列与回收网在同一平面内。
30、进一步地,接收视场角大于或等于180°。
31、应用本发明的技术方案,提供了一种基于视觉辅助的无人机撞网回收方法及撞网回收装置,该回收方法通过在回收网附近设置由不少于三个固定光源构成的光源阵列,通过发射光束对无人机形成视觉引导,同时利用设置在无人机上的摄像单元在无人机降落过程中实时呈现固定光源的像点,利用像点的坐标变化实时计算得到对准偏离值,辅助对回收网中心的捕获及定位,再结合回收网中心位置坐标、每个固定光源的坐标以及无人机的飞行高度进行舵面控制,从而实现无人机的自动撞网回收。本发明提出的撞网回收方法无须外界gps信号支持,舵面控制量的计算不依赖于无人机自身的位置和姿态信息,并且光源阵列和成像单元重量轻、体积小,能够满足轻小型无人机的重量和体积要求。
技术特征:
1.一种基于视觉辅助的无人机撞网回收方法,其特征在于,所述回收方法包括:
2.根据权利要求1所述的回收方法,其特征在于,获取所有像点的坐标包括:
3.根据权利要求2所述的回收方法,其特征在于,根据所有像点的坐标变化实时计算对准偏离值包括:
4.根据权利要求3所述的回收方法,其特征在于,根据所述回收网中心位置的坐标、每个固定光源的坐标、所述对准偏离值以及所述无人机的飞行高度控制所述无人机的舵面以引导所述无人机进行撞网回收包括:
5.一种无人机撞网回收装置,其特征在于,所述回收装置包括:
6.根据权利要求5所述的回收装置,其特征在于,所述固定光源选用近红外光源。
7.根据权利要求6所述的回收装置,其特征在于,所述固定光源选用激光光源。
8.根据权利要求7所述的回收装置,其特征在于,所述激光光源的功率通过以下公式确定:
9.根据权利要求8所述的回收装置,其特征在于,所述光源阵列与所述回收网在同一平面内。
10.根据权利要求9所述的回收装置,其特征在于,所述接收视场角大于或等于180°。
技术总结
本发明提供了一种基于视觉辅助的无人机撞网回收方法及撞网回收装置,该回收方法包括:利用至少三个不在一条直线上的固定光源构建光源阵列;通过设置在无人机上的摄像单元在相面上实时呈现每个固定光源的像点;获取回收网中心位置的坐标、每个固定光源的坐标以及所有像点的坐标;根据所有像点的坐标变化实时计算对准偏离值;根据回收网中心位置的坐标、每个固定光源的坐标、对准偏离值以及无人机的飞行高度控制无人机的舵面以引导无人机进行撞网回收。应用本发明的技术方案,以解决现有技术中回收方法依赖GPS信号支持、回收引导所需器件重量和体积较大导致无法满足轻小型无人飞行器重量和体积要求的技术问题。
技术研发人员:黄敏,马洪忠,王鑫,赫瑞华,刘忠诚
受保护的技术使用者:海鹰航空通用装备有限责任公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!