自走设备的控制方法、设备及存储介质与流程
本申请属于自动控制领域,具体涉及自走设备的控制方法、设备及存储介质。
背景技术:
1、自走设备是指可以自行移动的电子设备,自走设备上安装有割草机构,可以对草地进行修剪。目前,自走设备可以在工作区域内进行工作。
2、一般地,自走设备在获取到工作区域的区域地图后,开启该自走设备上的割草机构进行割草工作。
3、然而,上述自走设备的工作方式工作效率较低。
技术实现思路
1、本申请所要解决的技术问题包括自走设备在获取到工作区域的区域地图后,开启该自走设备上的割草机构进行割草工作,然而该工作方式导致自走设备工作效率较低的问题。
2、为解决上述技术问题,一方面,提供自走设备的控制方法,所述自走设备上设置有割草机构,所述方法包括:
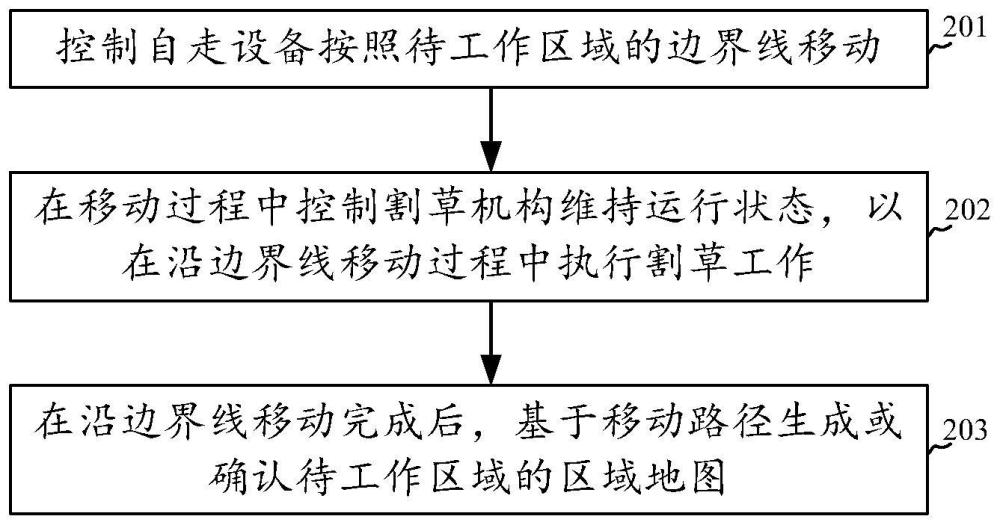
3、控制所述自走设备按照待工作区域的边界线移动;
4、在移动过程中控制所述割草机构维持运行状态,以在沿所述边界线移动过程中执行割草工作;
5、在沿所述边界线移动完成后,基于移动路径生成或确认所述待工作区域的区域地图。
6、可选地,所述边界线包括虚拟边界线,所述控制所述自走设备按照待工作区域的边界线移动,包括:
7、获取基于所述虚拟边界线生成的移动指令,所述移动指令用于指示所述自走设备的移动方式;
8、控制所述自走设备按照所述移动指令移动。
9、可选地,所述获取基于所述虚拟边界线生成的移动指令,包括:
10、接收与所述自走设备通信连接的其它设备发送的所述移动指令;
11、或者,
12、获取所述虚拟边界线的边界线数据;基于所述边界线数据生成所述移动指令。
13、可选地,所述边界线包括在所述待工作区域的区域边界上的物理边界线,所述基于移动路径生成所述待工作区域的区域地图之后,还包括:
14、获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图。
15、可选地,所述获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图,包括:
16、对于偏离所述物理边界线的部分移动路径,获取所述部分移动路径的修正后的位置信息;
17、在所述区域地图上,基于所述修正后的位置信息对所述部分移动路径进行修正,得到所述更新后的区域地图。
18、可选地,所述获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图,包括:
19、向与所述自走设备通信连接的其它设备发送所述区域地图,以供所述其它设备显示所述区域地图,并接收对所述区域地图的修改操作,得到所述更新后的区域地图;
20、接收所述其它设备发送的所述更新后的区域地图。
21、可选地,所述获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图之前,还包括:
22、在沿所述边界线移动过程中,确定当前位置是否偏离所述物理边界线;
23、在所述当前位置偏离所述物理边界线的情况下标记所述当前位置;
24、输出地图更新提示,所述地图更新提示用于提示对标记的当前位置所属的移动路径进行修改,得到所述更新后的区域地图。
25、可选地,所述控制所述自走设备按照待工作区域的边界线移动,包括:
26、控制所述自走设备与所述物理边界线相距预设距离移动,所述预设距离基于所述割草机构的安装位置确定。
27、可选地,所述获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图之后,还包括:
28、控制所述自走设备沿所述更新后的区域地图指示的区域边界移动;
29、在移动过程中,控制所述割草机构至少在所述更新后的区域地图指示的目标区域边界维持运行状态,所述目标区域边界是指所述更新后的区域地图上与所述区域地图不同的区域边界。
30、另一方面,提供一种电子设备,所述自走设备包括处理器和存储器;所述存储器中存储有程序,所述程序由所述处理器加载并执行以实现如上述方面所述的自走设备的控制方法。
31、又一方面,提供一种计算机可读存储介质,所述存储介质中存储有程序,所述程序被处理器执行时用于实现如上述方面所述的自走设备的控制方法。
32、本申请提供的技术方案,至少具有以下优点:本实施例提供的自走设备的控制方法,通过控制自走设备按照待工作区域的边界线移动;在移动过程中控制割草机构维持运行状态,以在沿边界线移动过程中执行割草工作;在沿边界线移动完成后,基于移动路径生成或确认待工作区域的区域地图;可以解决传统的自走设备的工作方式工作效率较低的问题;由于自走设备在沿边界线移动过程中便可执行割草工作,无需在工作地图确认后再进行割草,这样可以提高自走设备的工作效率。
33、另外,通过控制自走设备与物理边界线相距预设距离移动,这样可以保证自走设备不会偏移物理边界线,提高了边界线切割的准确性。
34、另外,由于自走设备在沿边界线移动的过程中,可能因为外界因素导致偏离边界线,基于上述技术问题,本实施例中,通过在沿边界线移动过程中,确定当前位置是否偏离物理边界线,在当前位置偏离物理边界线的情况下标记当前位置,输出地图更新提示,地图更新提示用于提示对标记的当前位置所属的移动路径进行修改,得到更新后的区域地图,这样可以保证在自走设备偏离边界线的情况下对偏离的路径进行修改,从而保证区域地图的准确性。
35、另外,通过在其他设备对偏离物理边界线的部分移动路径进行修改,由于在其它设备可以直观显示偏离物理边界线的部分移动路径与实际边界线的差异,从而进行修改操作,这样可以保证路径修改的准确性。
36、另外,由于自走设备在沿物理边界线移动过程中可能会偏移边界线,从而导致割草机构无法对全部边界线进行切割,基于上述技术问题,通过控制自走设备沿更新后的区域地图指示的区域边界移动,并控制割草机构在未被切割到的目标区域边界位置维持运行状态,这样可以保证自走设备可以对全部物理边界线区域进行切割,从而提高边界线切割效率。
技术特征:
1.一种自走设备的控制方法,其特征在于,所述自走设备上设置有割草机构,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述边界线包括虚拟边界线,所述控制所述自走设备按照待工作区域的边界线移动,包括:
3.根据权利要求2所述的方法,其特征在于,所述获取基于所述虚拟边界线生成的移动指令,包括:
4.根据权利要求1所述的方法,其特征在于,所述边界线包括在所述待工作区域的区域边界上的物理边界线,所述基于移动路径生成所述待工作区域的区域地图之后,还包括:
5.根据权利要求4所述的方法,其特征在于,所述获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图,包括:
6.根据权利要求4所述的方法,其特征在于,所述获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图,包括:
7.根据权利要求4所述的方法,其特征在于,所述获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图之前,还包括:
8.根据权利要求4所述的方法,其特征在于,所述控制所述自走设备按照待工作区域的边界线移动,包括:
9.根据权利要求4所述的方法,其特征在于,所述获取基于所述移动路径与所述物理边界线之间的差异生成的更新后的区域地图之后,还包括:
10.一种电子设备,其特征在于,所述电子设备包括处理器和存储器;所述存储器中存储有程序,所述程序由所述处理器加载并执行以实现如权利要求1至9任一所述的自走设备的控制方法。
11.一种计算机可读存储介质,其特征在于,所述存储介质中存储有程序,所述程序被处理器执行时用于实现如权利要求1至9任一所述的自走设备的控制方法。
技术总结
本申请涉及自走设备的控制方法、设备及存储介质,属于自动控制领域。该方法包括:控制自走设备按照待工作区域的边界线移动;在移动过程中控制割草机构维持运行状态,以在沿边界线移动过程中执行割草工作;在沿边界线移动完成后,基于移动路径生成或确认待工作区域的区域地图;可以解决传统的自走设备的工作方式工作效率较低的问题;由于自走设备在沿边界线移动过程中便可执行割草工作,无需在工作地图确认后再进行割草,这样可以提高自走设备的工作效率。
技术研发人员:李胜楠,李飞,姚瑶
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!