增量式轨迹平滑与碰撞检测方法、系统、存储介质及计算机设备与流程
本发明涉及拖地机器人,尤其涉及一种增量式轨迹平滑与碰撞检测方法、系统、存储介质及计算机设备。
背景技术:
1、扫地机是一种自动行走并清扫的家电机器人,随着人们对生活品质的提升,扫地机逐渐成为生活中重要的智能家电。
2、全局路径规划是扫地机规划算法中重要的组成部分,承担了导航任务;然后在复杂的家庭环境中,如何做到平滑、安全的行驶是一个需要解决的问题。现有的扫地机通常采用的轨迹平滑算法以多参数同时优化或者em方法平滑辅以延迟碰撞检测,但这种方法难以兼顾算力与轨迹性能。
3、综上可知,现有的方法在实际使用上,存在着较多的问题,所以有必要加以改进。
技术实现思路
1、针对上述的缺陷,本发明的目的在于提供一种增量式轨迹平滑与碰撞检测方法,系统、存储介质及其计算机设备,能够在兼具安全性、平滑性以及性能的前提下,实现快速的全局轨迹搜索。
2、为了实现上述目的,本发明提供一种增量式轨迹平滑与碰撞检测方法,包括步骤:
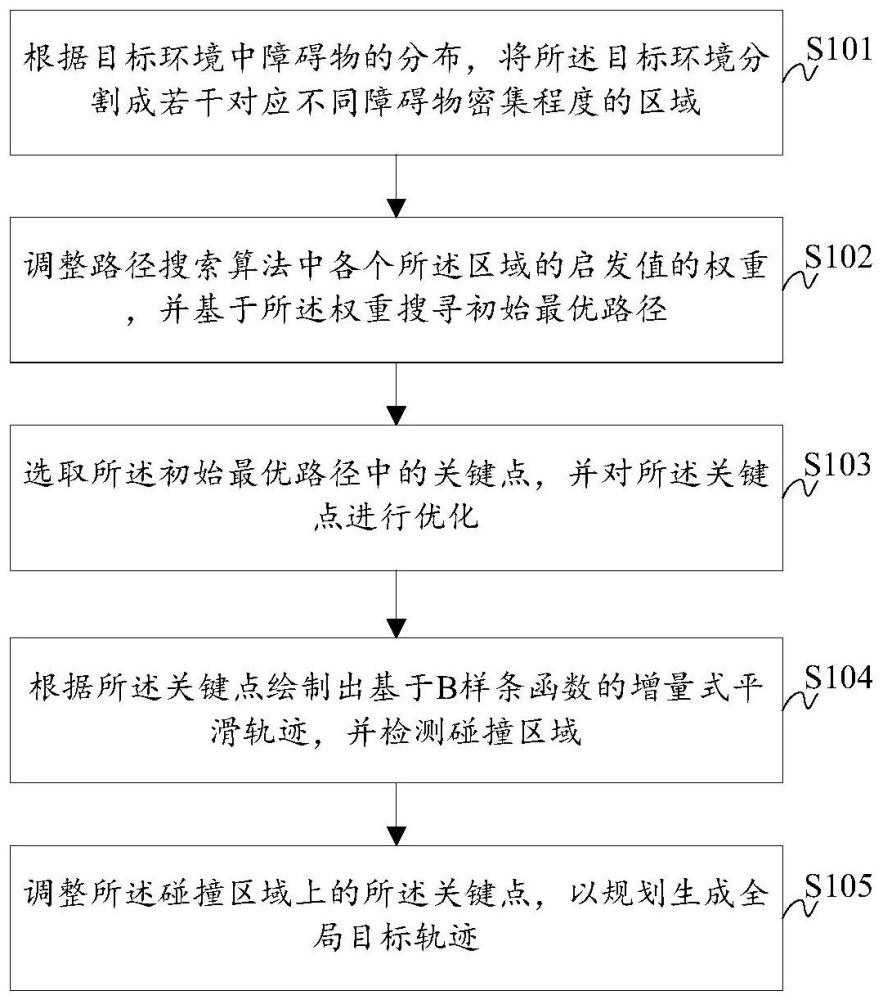
3、根据目标环境中障碍物的分布,将所述目标环境分割成若干对应不同障碍物密集程度的区域;
4、调整路径搜索算法中各个所述区域的启发值的权重,并基于所述权重搜寻初始最优路径;
5、选取所述初始最优路径中的关键点,并对所述关键点进行优化;
6、根据所述关键点绘制出基于b样条函数的增量式平滑轨迹,并检测碰撞区域;
7、调整所述碰撞区域上的所述关键点,以规划生成全局目标轨迹。
8、可选的,所述根据目标环境中障碍物的分布,将所述目标环境分割成若干对应不同障碍物密集程度的区域的步骤具体包括:
9、根据目标环境中的障碍物分布信息建立障碍物的距离场;
10、基于所述距离场对所述目标环境进行分割,获得若干对应不同障碍物密集程度的区域。
11、可选的,所述调整路径搜索算法中各个所述区域的启发值的权重,并基于所述权重搜寻初始最优路径的步骤具体包括:
12、根据预设规则调整路径搜索算法中各个所述区域的启发值的权重;
13、通过所述路径搜索算法基于所述权重搜寻出所述目标环境中的初始最优路径。
14、可选的,所述选取所述初始最优路径中的关键点,并对所述关键点进行优化的步骤具体包括:
15、根据距离场值选取所述初始最优路径中方向突变和/或多障碍物区域的关键点;
16、对所述关键点进行优化处理。
17、可选的,所述对所述关键点进行优化处理的步骤具体包括:
18、通过梯度下降法对所述关键点进行优化处理。
19、可选的,所述根据所述关键点绘制出基于b样条函数的增量式平滑轨迹,并检测碰撞区域的步骤具体包括:
20、根据所述关键点绘制基于三阶b样条的增量式平滑轨迹,并检测所述增量式平滑轨迹的碰撞区域。
21、可选的,所述调整所述碰撞区域上的所述关键点,以规划生成全局目标轨迹的步骤具体包括:
22、基于b样条曲线的包围特征调整所述碰撞区域上的关键点,以规划生成全局目标轨迹。
23、还提供了一种增量式轨迹平滑与碰撞检测系统,包括有:
24、分割单元,用于根据目标环境中障碍物的分布,将所述目标环境分割成若干对应不同障碍物密集程度的区域;
25、路径搜索单元,用于调整路径搜索算法中各个所述区域的启发值的权重,并基于所述权重搜寻初始最优路径;
26、选取与优化单元,用于选取所述初始最优路径中的关键点,并对所述关键点进行优化;
27、绘制与碰撞检测单元,用于根据所述关键点绘制出基于b样条函数的增量式平滑轨迹,并检测碰撞区域;
28、调整单元,用于调整所述碰撞区域上的所述关键点,以规划生成全局目标轨迹。
29、另外,还提供了一种存储介质和计算机设备,所述存储介质用于存储一种用于执行上述增量式轨迹平滑与碰撞检测方法的计算机程序。
30、所述计算机设备包括存储介质、处理器以及存储在所述存储介质上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的增量式轨迹平滑与碰撞检测方法。
31、本发明所述的增量式轨迹平滑与碰撞检测方法及其系统,基于对目标环境分割成不同障碍物密集程度的区域,进而通过调整对各个区域的启发值的权重以通过路径搜索算法获得初始最优路径;再选取初始最优路径中的关键点并进行优化;根据所述关键点绘制基于b样条的增量式平滑轨迹,同时调整碰撞区域上的关键点,以规划生成全局目标轨迹。据此,本发明能够基于对环境理解的启发权重调整,实现递增式碰撞检测与轨迹平滑效果;在兼具安全性、平滑性以及性能的前提下,实现快速的全局轨迹搜索。
技术特征:
1.一种增量式轨迹平滑与碰撞检测方法,其特征在于,包括步骤:
2.根据权利要求1所述的增量式轨迹平滑与碰撞检测方法,其特征在于,所述根据目标环境中障碍物的分布,将所述目标环境分割成若干对应不同障碍物密集程度的区域的步骤具体包括:
3.根据权利要求1所述的增量式轨迹平滑与碰撞检测方法,其特征在于,所述调整路径搜索算法中各个所述区域的启发值的权重,并基于所述权重搜寻初始最优路径的步骤具体包括:
4.根据权利要求1所述的增量式轨迹平滑与碰撞检测方法,其特征在于,所述选取所述初始最优路径中的关键点,并对所述关键点进行优化的步骤具体包括:
5.根据权利要求4所述的增量式轨迹平滑与碰撞检测方法,其特征在于,所述对所述关键点进行优化处理的步骤具体包括:
6.根据权利要求1所述的增量式轨迹平滑与碰撞检测方法,其特征在于,所述根据所述关键点绘制出基于b样条函数的增量式平滑轨迹,并检测碰撞区域的步骤具体包括:
7.根据权利要求1所述的增量式轨迹平滑与碰撞检测方法,其特征在于,所述调整所述碰撞区域上的所述关键点,以规划生成全局目标轨迹的步骤具体包括:
8.一种增量式轨迹平滑与碰撞检测系统,其特征在于,包括有:
9.一种存储介质,其特征在于,用于存储一种用于执行权利要求1~7中任意一种所述增量式轨迹平滑与碰撞检测方法的计算机程序。
10.一种计算机设备,包括存储介质、处理器以及存储在所述存储介质上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1~7任一项所述增量式轨迹平滑与碰撞检测方法。
技术总结
本发明提供了一种增量式轨迹平滑与碰撞检测方法,根据目标环境中障碍物的分布,将目标环境分割成若干对应不同障碍物密集程度的区域;调整路径搜索算法中各个区域的启发值的权重,并基于所述权重搜寻初始最优路径;选取初始最优路径中的关键点,并对关键点进行优化;根据所述关键点绘制出基于B样条函数的增量式平滑轨迹,并检测碰撞区域;调整所述碰撞区域上的关键点,以规划生成全局目标轨迹。本发明还提供了一种增量式轨迹平滑与碰撞检测系统、存储介质及计算机设备。借此,本发明能够在兼具安全性、平滑性以及性能的前提下,实现快速的全局轨迹搜索。
技术研发人员:许昕宇
受保护的技术使用者:北京奇虎科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!