一种智能躲避障碍物的机器人的制作方法
1.本发明涉及机器人技术领域,尤其涉及一种智能躲避障碍物的机器人。
背景技术:
2.在农作物种植过程中,杂草与农作物争夺阳光、水分、肥料、与作物争夺生存空间,如不经过及时的处理,将阻碍作物生长,以致作物产量的下降,妨碍农作物的收成,增加生产费用。
3.机械化的除草方式应运而生,可分为传统手动或人工机器和自动化机器人两大类。激光除草作为一种环境友好型的绿色除草方式,可以有效缓解当前大部分化学除草带来的危害,符合国家提出的绿色农业发展方向。机器人除草机操作简单、割草效率高,而且可以自动完成割草任务,减少人力成本和时间成本,但是机器人在规划的行驶路线上行驶时,遇到障碍物无法规避,一旦撞上障碍物,极易造成机器人的损坏。
技术实现要素:
4.为了克服现有机器人在行驶过程中无法规避障碍物的问题,本发明提供了一种智能躲避障碍物的机器人。
5.为了解决上述技术问题,本发明提供了一种智能躲避障碍物的机器人,包括控制模块、测距模块、避障驱动模块和终端模块,控制模块分别与避障驱动模块、测距模块和终端模块连接;
6.终端模块,用于生成第一控制指令,第一控制指令为规划机器人第一行驶路线的指令;
7.控制模块,用于接收第一控制指令,以及将第一控制指令发送给驱动模块;
8.避障驱动模块,用于根据第一控制指令控制机器人在第一行驶路线上行驶;
9.测距模块,用于在机器人在第一行驶路线上行驶的过程中,根据第一行驶路线上出现的障碍物,生成障碍物信息,障碍物信息中包括机器人与障碍物之间的直线距离;
10.控制模块,还用于接收障碍物信息,并将障碍物信息发送给终端模块;
11.终端模块,还用于根据障碍物信息生成第二控制指令,第二控制指令为规划机器人躲避障碍物的第二行驶路线的指令;
12.控制模块,还用于接收第二控制指令,以及将第二控制指令发送给规避驱动模块;
13.避障驱动模块,还用于根据第二控制指令控制机器人在第二行驶路线上行驶,以躲避障碍物。
14.本发明提供的一种智能躲避障碍物的机器人的有益效果是:工作时,规避驱动模块根据第一控制指令控制在规划的第一行驶路线上行驶至目的地,当测距模块发现障碍物并生成障碍物信息后,终端模块根据障碍物信息生成第二控制指令,规避驱动模块根据第二控制指令控制在规划的第二行驶路线上行驶至目的地,从而躲避障碍物,解决了现有机器人在行驶过程中无法规避障碍物的问题。
15.在上述技术方案的基础上,本发明的一种智能躲避障碍物的机器人还可以做如下改进。
16.进一步,上述测距模块为超声波测距传感器。
17.采用上述进一步方案的有益效果是:通过超声波测距传感器能够准确识别障碍物,并且获取障碍物与机器人之间的直线距离。
18.进一步,上述测距模块包括至少四个超声波测距传感器,每个超声波测距传感器对应机器人的一个行驶方向;
19.对于每个超声波测距传感器,超声波测距传感器,用于机器人在第一行驶路线上行驶的过程中,根据机器人在第一行驶路线上的目标行驶方向,以及目标行驶方向上出现的障碍物,通过目标行驶方向对应的超声波测距传感器生成障碍物信息,目标行驶方向为任意一个行驶方向。
20.采用上述进一步方案的有益效果是:在机器人的各个行驶方向上均设置有超声波测距传感器,因此,无论机器人在行驶过程中朝任意一个行驶方向行驶,均能通过超声波测距传感器识别到障碍物。
21.进一步,上述对于每个超声波测距传感器,超声波测距传感器,具体用于:
22.所述机器人在第一行驶路线上行驶的过程中,根据所述机器人在所述第一行驶路线上的目标行驶方向,以及所述目标行驶方向上出现的障碍物,通过第一公式,确定机器人与障碍物之间的直线距离,其中,第一公式为:
[0023][0024]
其中,表示机器人与障碍物之间的直线距离,v表示超声波测距传感器发射的超声波的飞行速度,t表示超声波测距传感器发射的超声波的传播时间,传播时间表征了超声波从超声波测距传感器到达障碍物,以及从障碍物返回到超声波测距传感器的所需时间。
[0025]
采用上述进一步方案的有益效果是:通过第一公式,超声波测距传感能够获取机器人与障碍物之间的直线距离,从而生成障碍物信息。
[0026]
进一步,上述避障驱动模块包括电机驱动器、电机和车轮,电机驱动器分别与控制模块和电机连接,电机与车轮连接,车轮与机器人连接;
[0027]
电机驱动器,用于根据第一控制指令驱动电机提供车轮所需的动力,或者根据第二控制指令驱动电机提供车轮所需的动力,动力包括前进动力、后退动力、左方向动力和右方向动力;
[0028]
电机,用于为车轮提供所需的动力;
[0029]
车轮,用于带动机器人进行与动力相对应的方向的运动,相对应的方向的运动包括前进、后退、左方向行驶和右方向行驶。
[0030]
采用上述进一步方案的有益效果是:电机驱动器驱动电机为车轮提供前进动力、后退动力、左方向动力和右方向动力,使得机器人能够前进、后退、左方向行驶和右方向行驶。
[0031]
进一步,该机器人还包括语音提示模块,语音提示模块与控制器模块连接;
[0032]
终端模块,还用于生成第三控制指令,第三控制指令为直线距离小于预设阈值时生成的语音播报的指令;
[0033]
控制模块,还用于将接收到的第三控制指令发送给语音提示模块;
[0034]
语音提示模块,用于根据第三控制指令发出语音播报。
[0035]
采用上述进一步方案的有益效果是:通过语言播报提醒使用者,第一行驶路线上的障碍物与机器人之间的直线距离过近,导致机器人无法及时规避障碍物。
[0036]
进一步,该机器人还包括电源模块;
[0037]
电源模块,用于为控制模块、测距模块和避障驱动模块提供电源。
[0038]
采用上述进一步方案的有益效果是:通过电源模块为机器人上的各个模块提供电源。
[0039]
进一步,该机器人还包括通信模块;
[0040]
通信模块,用于控制模块与终端模块之间的数据交互。
[0041]
采用上述进一步方案的有益效果是:通过通信模块,完成控制模块与终端模块之间的数据交互。
附图说明
[0042]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面结合附图和实施例对本发明作进一步说明。
[0043]
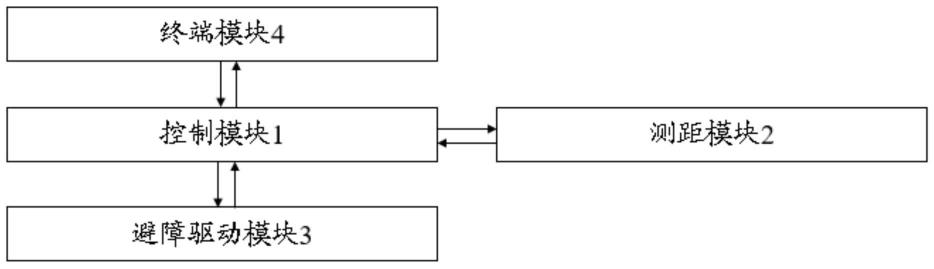
图1为本发明实施例的一种智能躲避障碍物的机器人的系统示意图;
[0044]
图2为本发明实施例的一种智能躲避障碍物的机器人的结构示意图;
[0045]
图3为本发明实施例的一种智能躲避障碍物的机器人去掉外壳的结构示意图
[0046]
图4为图3另一个视角下的结构示意图。
[0047]
附图标记:控制模块1、测距模块2、避障驱动模块3、终端模块4、电机驱动器3、电机5、车轮7、语音提示模块8、电源模块9、机器人10、除草器11。
具体实施方式
[0048]
下列实施例是对本发明的进一步解释和补充,对本发明不构成任何限制。
[0049]
以下结合附图描述本发明实施例的一种智能躲避障碍物的机器人。
[0050]
如图1-图4所示,本发明实施例的一种智能躲避障碍物的机器人,包括控制模块1、测距模块2、避障驱动模块3和终端模块4,控制模块1分别与避障驱动模块3、测距模块2和终端模块4连接;
[0051]
终端模块4,用于生成第一控制指令,第一控制指令为规划机器人10第一行驶路线的指令;
[0052]
控制模块1,用于接收第一控制指令,以及将第一控制指令发送给驱动模块;
[0053]
避障驱动模块3,用于根据第一控制指令控制机器人10在第一行驶路线上行驶;
[0054]
测距模块2,用于在机器人10在第一行驶路线上行驶的过程中,根据第一行驶路线上出现的障碍物,生成障碍物信息,障碍物信息中包括机器人10与障碍物之间的直线距离;
[0055]
控制模块1,还用于接收障碍物信息,并将障碍物信息发送给终端模块4;
[0056]
终端模块4,还用于根据障碍物信息生成第二控制指令,第二控制指令为规划机器人10躲避障碍物的第二行驶路线的指令;
[0057]
控制模块1,还用于接收第二控制指令,以及将第二控制指令发送给规避驱动模
块;
[0058]
避障驱动模块3,还用于根据第二控制指令控制机器人10在第二行驶路线上行驶,以躲避障碍物。
[0059]
工作时,规避驱动模块根据第一控制指令控制在规划的第一行驶路线上行驶至目的地,当测距模块2发现障碍物并生成障碍物信息后,终端模块4根据障碍物信息生成第二控制指令,规避驱动模块根据第二控制指令控制在规划的第二行驶路线上行驶至目的地,从而躲避障碍物。
[0060]
可选的,上述终端模块4可以为用户使用的终端设备,比如,电脑,在终端模块4的显示界面上可显示有一个“控制标识”,用户触发该控制标识即可生成第一控制指令和第二控制指令,该控制标识可以是一个插件,可通过文字或形状等形式显示,在用户触发该控制标识后,将生成的第一控制指令或者第二控制指令发送给控制系统。
[0061]
可选的,上述第一规划路线可以是预先存储在控制系统中的,第一规划路线可以是针对某个区域中道路进行规划的行驶路线,机器人10按照此第一规划路线进行行驶,可以到达行驶至该区域的各个位置。
[0062]
可选的,上述机器人10上可搭载除草器,例如激光除草器,当机器人10根据第一规划路线行驶至目的地后,利用激光除草器进行除草工作。
[0063]
可选的,上述控制系统可采用型号为stm32f4的主控芯片,其工作时电压为3.3v,并拥有丰富的io接口,同时功耗低,处理数据的速度快,能实现数据处理等多个方面的功能。
[0064]
可选的,上述测距模块2为超声波测距传感器。
[0065]
可选的,上述测距模块2包括至少四个超声波测距传感器,每个超声波测距传感器对应机器人10的一个行驶方向,即每个超声波测距传感器用于获取对应行驶方向上对应的障碍物信息,具体的:
[0066]
对于每个超声波测距传感器,该超声波测距传感器,用于机器人10在第一行驶路线上行驶的过程中,根据机器人10在第一行驶路线上的目标行驶方向(该目标行驶方向指的是机器人10在第一行驶路线上的当前行驶方向),以及目标行驶方向上出现的障碍物,通过目标行驶方向对应的超声波测距传感器生成障碍物信息。
[0067]
本实施例中,超声波测距传感器设置为四个,分别为第一传感器、第二传感器、第三传感器和第四传感器,其中,如图2所示,该机器人10的行驶方向分别为箭头a的正方向、箭头b的左方向、箭头c的右方向以及箭头d的反方向,因此,将第一传感器设置在朝向正方向的位置,第二传感器设置在朝向左方向的位置,第三传感器设置在朝向右方向的位置,第四传感器设置在朝向反方向的位置,当机器人10朝目标行驶方向行驶时,例如目标行驶方向为正方向,则通过第一传感器生成障碍物信息,以此类推,机器人10朝目标行驶方向行驶,就通过目标行驶方向对应的超声波测距传感器生成障碍物信息。
[0068]
可选的,对于每个超声波测距传感器,超声波测距传感器,具体用于:
[0069]
所述机器人10在第一行驶路线上行驶的过程中,根据所述机器人10在所述第一行驶路线上的目标行驶方向,以及所述目标行驶方向上出现的障碍物,通过第一公式,确定机器人10与障碍物之间的直线距离,其中,第一公式为:
[0070][0071]
其中,表示机器人10与障碍物之间的直线距离,v表示超声波测距传感器发射的超声波的飞行速度,t表示超声波测距传感器发射的超声波的传播时间,传播时间表征了超声波从超声波测距传感器到达障碍物,以及从障碍物返回到超声波测距传感器的所需时间。
[0072]
可选的,如附图3与附图4中所示,上述避障驱动模块3包括附图3中电机驱动器3、图4电机5、和车轮7,电机驱动器3分别与控制模块1和电机5连接,电机5与车轮7连接,车轮7与机器人10连接;
[0073]
电机驱动器3,用于根据第一控制指令驱动电机5提供车轮7所需的动力,或者根据第二控制指令驱动电机5提供车轮7所需的动力,动力包括前进动力、后退动力、左方向动力和右方向动力;
[0074]
电机5,用于为车轮7提供所需的动力;
[0075]
车轮7,用于带动机器人10进行与动力相对应的方向的运动,相对应的方向的运动包括前进、后退、左方向行驶和右方向行驶。
[0076]
可选的,如图4所示,该机器人10还包括语音提示模块8,语音提示模块8与控制器模块1连接;
[0077]
终端模块4,还用于生成第三控制指令,第三控制指令为直线距离小于预设阈值时生成的语音播报的指令;
[0078]
控制模块1,还用于将接收到的第三控制指令发送给语音提示模块8;
[0079]
语音提示模块8,用于根据第三控制指令发出语音播报。
[0080]
本实施例中,无论机器人10在第一行驶路线行驶或第二行驶路线上行驶,都需要在预设的间隔时间段对障碍物进行识别,在间隔时间段内(例如每隔1分钟进行一次障碍物识别),机器人10有可能会在第二行驶路线上遇到障碍物,且机器人10无法及时规划新路线,因此,通过语言播报,当机器人10与障碍物之间的直线距离小于阈值,则使用语音播报提醒使用者人工规避障碍物。
[0081]
可选的,上述机器人10在第一行驶路线或第二行驶路线上行驶时,需要在预设间隔时间段反复通过测距模块2对障碍物进行识别,避免新规划的行驶路线依然无法躲避原行驶路线上的障碍物,预设时间段可根据实际情况进行设置。
[0082]
可选的,如图4所示,该机器人10还包括电源模块9;
[0083]
电源模块9,用于为控制模块1、测距模块2和避障驱动模块3提供电源。
[0084]
可选的,电源模块9包括电池与稳压模块,电池通过稳压模块降压给机器人10上的各个模块进行供电并且维持电压输出稳定的效果。
[0085]
可选的,该机器人10还包括通信模块;
[0086]
通信模块,用于控制模块1与终端模块4之间的数据交互。
[0087]
可选的,通信模块可为4g、5g和wifi中的至少一种。
[0088]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任
一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0089]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1