一种变电站自动巡检航线规划方法与流程
本发明涉及变电站巡检领域,具体地涉及一种变电站自动巡检航线规划方法。
背景技术:
1、电力系统对于现代经济社会的发展起着极为关键的作用,保障电力系统的安全可靠运行是一项长期的不可掉以轻心的电力日常工作。其中变电站担负着电能量转换和电能重新分配的任务,是电力系统中不可缺少的重要环节,其站内设备是否安全运行直接关系到整个电网是否能够正常运行,对电网的安全和经济运行有着举足轻重的作用。而随着我国电力技术的快速发展,变电站的规模、容量及电压等级越来越高,对变电站的安全平稳运行也提出了更高要求,对站内电气设备的运行情况进行及时检查成为变电站安全可靠运行的重要保障措施。由于变电站内部的电力设备机器复杂,人工巡检可能会有巡检不到位的巡检死角和盲区,无法及时发现变电站的电力设备的缺陷隐患,因此,可以通过无人机规划巡检路线以及时发现变电站的电力设备的缺陷隐患。
技术实现思路
1、本发明实施例的目的是提供一种变电站自动巡检航线规划方法,该方法可以规划无人机在变电站的巡检路线,及时发现变电站的电力设备的缺陷隐患。
2、为了实现上述目的,本发明实施例提供一种变电站自动巡检航线规划方法,所述方法包括:
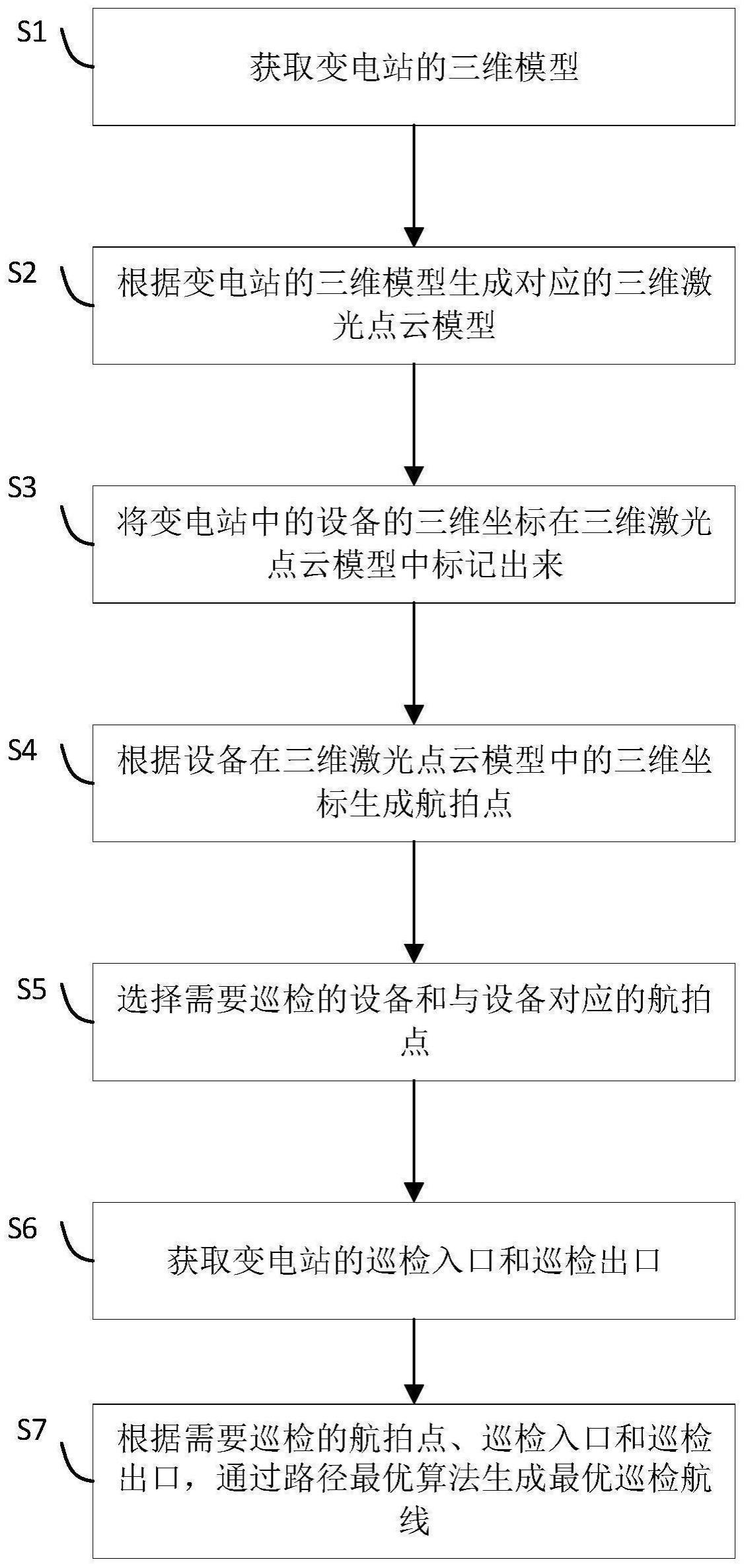
3、获取变电站的三维模型;
4、根据所述变电站的三维模型生成对应的三维激光点云模型;
5、将所述变电站中的设备的三维坐标在所述三维激光点云模型中标记出来;
6、根据所述设备在所述三维激光点云模型中的三维坐标生成航拍点;
7、选择需要巡检的设备和与所述设备对应的航拍点;
8、获取所述变电站的巡检入口和巡检出口;
9、根据需要巡检的所述航拍点、巡检入口和巡检出口,通过路径最优算法生成最优巡检航线。
10、可选的,根据所述变电站的三维模型生成对应的三维激光点云模型包括:
11、获取生成的所述三维激光点云模型;
12、获取所述三维激光点云模型中远离目标主体,漂浮于点云上方的稀疏、散乱的点;
13、将所述三维激光点云模型中远离目标主体,漂浮于点云上方的稀疏、散乱的点去除。
14、可选的,根据所述变电站的三维模型生成对应的三维激光点云模型包括:
15、获取生成的所述三维激光点云模型;
16、获取所述三维激光点云模型中点云超过预设阈值的点云区域;
17、去除所述点云区域中的部分点云,以使得所述点云区域中点云低于所述预设阈值。
18、可选的,根据所述变电站的三维模型生成对应的三维激光点云模型包括:
19、获取生成的所述三维激光点云模型;
20、获取所述三维激光点云模型中需巡检区域所在的点云;
21、将所述所述三维激光点云模型中非需巡检区域所在的点云去除。
22、可选的,所述需要巡检的设备包括:避雷针、阻波器、避雷针计数器、绝缘子、油表和构架。
23、可选的,根据所述设备在所述三维激光点云模型中的三维坐标生成航拍点包括:
24、获取所述设备在所述三维激光点云模型中的位置;
25、根据航拍需求获取拍摄所述设备的最近距离;
26、获取拍摄所述设备的最佳角度;
27、根据拍摄所述设备的最近距离和最佳角度在所述三维激光点云模型中生成航拍点。
28、可选的,选择需要巡检的设备和与所述设备对应的航拍点包括;
29、确定需要巡检的所述设备;
30、根据需要巡检的所述设备在所述三维坐标中确定对应的航拍点。
31、可选的,获取变电站的三维模型包括:
32、通过摄像头获取所述变电站的各个设备的图像;
33、拼接所述摄像头获取到的所述变电站的各个设备的图像;
34、根据拼接后的所述图像建立关于所述变电站的各个设备的三维模型。
35、通过上述技术方案,本发明提供的一种变电站自动巡检航线规划方法通过获取该变电站的三维模型,并且可以根据该变电站的三维模型生成对应的三维激光点云模型,在得到该变电站的三维激光点云模型后可以根据需要将需要巡检的设备在该三维激光点云模型中标记出来,然后生成航拍点,选择需要巡检的设备和与该设备对应的航拍点,获取该变电站的巡检入口和巡检出口,获取该变电站的巡检入口和巡检出口和需要巡检的航拍点后可以根据路径最优算法生成最优巡检航线,生成最优巡检航线后无人机可以根据该最优巡检航线进行飞行,然后对该变电站内的电力设备进行巡检。
36、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种变电站自动巡检航线规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据所述变电站的三维模型生成对应的三维激光点云模型包括:
3.根据权利要求1所述的方法,其特征在于,根据所述变电站的三维模型生成对应的三维激光点云模型包括:
4.根据权利要求1所述的方法,其特征在于,根据所述变电站的三维模型生成对应的三维激光点云模型包括:
5.根据权利要求1所述的方法,其特征在于,所述需要巡检的设备包括:避雷针、阻波器、避雷针计数器、绝缘子、油表和构架。
6.根据权利要求1所述的方法,其特征在于,根据所述设备在所述三维激光点云模型中的三维坐标生成航拍点包括:
7.根据权利要求1所述的方法,其特征在于,选择需要巡检的设备和与所述设备对应的航拍点包括;
8.根据权利要求1所述的方法,其特征在于,获取变电站的三维模型包括:
技术总结
本发明实施例提供一种变电站自动巡检航线规划方法,属于变电站巡检领域。所述方法包括:获取变电站的三维模型;根据所述变电站的三维模型生成对应的三维激光点云模型;将所述变电站中的设备的三维坐标在所述三维激光点云模型中标记出来;根据所述设备在所述三维激光点云模型中的三维坐标生成航拍点;选择需要巡检的设备和与所述设备对应的航拍点;获取所述变电站的巡检入口和巡检出口;根据需要巡检的所述航拍点、巡检入口和巡检出口,通过路径最优算法生成最优巡检航线。该方法可以规划无人机在变电站的巡检路线,及时发现变电站的电力设备的缺陷隐患。
技术研发人员:马欢,刘文涛,朱仲贤,刘鑫,朱元付,汪运,汪伟伟,吴翔,杜鹏,郭振宇,蒲道杰,蔡科伟,黄道钧,张学友,郭龙刚,杜瑶,常文婧,徐蒙福,臧春华,陈迎,翁凌,杨乃旗,邵华,沈国堂,魏南,施雯
受保护的技术使用者:国网安徽省电力有限公司超高压分公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!