一种自主水下机器人三维路径规划方法
本发明属于机器人路径规划,具体涉及一种自主水下机器人三维路径规划方法。
背景技术:
1、自主水下航行器(auv)作为海洋作业的重要工具,目前已广泛用于执行海底探测、打捞、识别等任务。路径规划作为自主水下航行器的关键技术是机器人控制领域的研究热点。由于auv的无缆特性,auv需要利用已有的海图和采集到的环境信息建立水下环境模型,利用路径规划方法规划出能耗低、安全避障等多约束条件下最优路径。传统的路径规划算法如人工势场法易陷入局部最优解;a*算法全局优化能力不足、处理速度慢;快速步进算法迭代时间过长。随着路径规划算法的模拟运行环境越发复杂,传统路径规划算法优化效果差的问题越发明显,一系列启发式智能算法逐渐占据主导地位。如狼群算法、遗传算法、粒子群算法、人工鱼群算法、分布估计算法等。其中,基于等宽度直方图分布估计算法(fwh)在处理auv路径规划问题时存在计算精度低,计算出的路径能耗值难以收敛到最优的问题。本发明为优化这些问题,提出一种双重个体筛选机制的改进算法pfwh,通过在fwh算法的迭代过程中融合部分粒子群优化算法的筛选机制,提高了算法计算的精度,加快收敛速度,减少auv的能量消耗。
技术实现思路
1、针对现有技术中的不足,本发明提供了一种自主水下机器人三维路径规划方法,以解决现有技术中路径规划过程中算法精度低、收敛速度慢、能量消耗大的技术问题。
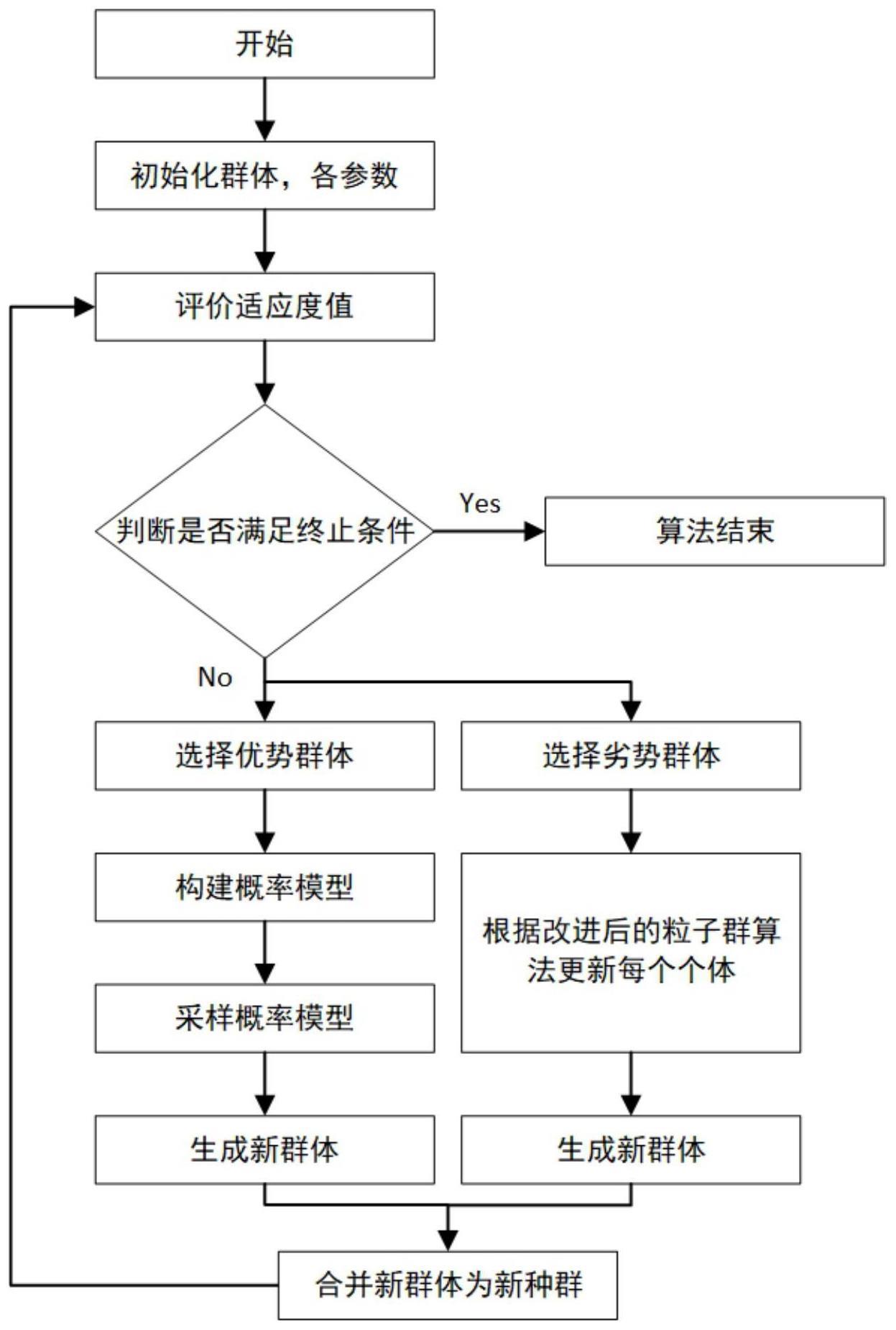
2、本发明提供了一种自主水下机器人三维路径规划方法,包括如下步骤:
3、步骤1:获取水下机器人运行参数、任务所在区域的水下环境数据以及海流数据;
4、步骤2:构建能耗最优适应度函数;
5、步骤3:将步骤1中获取的各数据以路径构成的格式作为能耗最优适应度函数的输入数据;
6、步骤4:能耗最优适应度函数根据输入的数据计算评价值,
7、当评价值收敛时,能耗最优适应度函数的输出作为最优输出路径,完成水下机器人路径规划过程;
8、当评价值未收敛时,执行步骤5-7;
9、步骤5:根据能耗最优适应度函数的评价获得优势群体以及劣势群体;
10、步骤6:对优势群体进行如下处理:
11、构建概率模型,将优势群体作为概率模型的输入进行概率采样生成优势群体的新群体;
12、对劣势群体进行如下处理:
13、通过粒子群算法对劣势群体进行优化更新,生成劣势群体的新群体;
14、步骤7:将优势群体的新群体、劣势群体的新群体合并,合并后作为能耗最优适应度函数的输入数据,返回步骤4。
15、进一步地,所述步骤1中的任务所在区域的水下环境数据通过水下机器人执行任务地区的存储水下地形分布状态的水下数字高程模型获取。
16、进一步地,所述能耗最优适应度函数具体如下:
17、
18、其中,kt,kq,n,vauv分别为auv推进器的推力系数、转矩系数、螺旋桨转速和auv进速,a1,b1,c1为auv进速与推力系数实测数据通过最小二乘法拟合得到的二次曲线的系数,a2,b2,c2为auv进速与转矩系数实测数据通过最小二乘法拟合得到的二次曲线的系数,a3,b3,c3为auv进速与螺旋桨转速实测数据通过最小二乘法拟合得到的二次曲线的系数。
19、进一步地,粒子群算法具体为:
20、
21、其中,vi为个体中每个路径点的增加量,r2为[0,1]之间的随机数,c2为学习因子,xi为个体的当前路径点,gbesti为迭代过程中产生的最优路径,randn为符合高斯分布的随机数。
22、进一步地,所述步骤5中根据能耗最优适应度函数的评价获得优势群体以及劣势群体具体为:将适应度值从高至低排序后,前15%-25%中任一百分比的适应度值对应的群体作为优势群体。
23、本发明的有益效果:
24、本发明通过将fwh与粒子群优化算法中优势个体的部分筛选机制相结合的方法,组成双重优势个体更新方法,提高auv路径规划最优路径的精度和平滑度,增加收敛速度。仿真结果表明,相比于改进前的算法,新的算法计算出的能耗值减少24.9%,生成的路径更平滑。本发明使用任务所在区域的水下环境实测数据以及海流实测数据,使仿真得出的结果更符合实际情况。本发明使用auv设备实测数据构建的能耗函数作为算法计算的适应度函数,使算法计算出的适应度值和最优路径更符合auv设备的实际情况。本发明将种群的前15%-25%中任一百分比的适应度值对应的群体作为优势群体,这个优势个体的范围是通过多次改变不同占比测试出的最优占比,相比于更低占比,最优占比可以在略微降低收敛速度的情况下减小最优适应度值,相比于更高的占比,最优占比在收敛速度和最优适应度值方面均有更好的效果。本发明使用改进地粒子群算法对种群中地劣势个体进行更新,在原始粒子群算法中添加高斯变异环节,使更新的个体有概率跳出局部最优,防止算法最终收敛至局部最优。
技术特征:
1.一种自主水下机器人三维路径规划方法,其特征在于,包括如下步骤:
2.如权利要求1所述的自主水下机器人三维路径规划方法,其特征在于,所述步骤1中的任务所在区域的水下环境数据通过水下机器人执行任务地区的存储水下地形分布状态的水下数字高程模型获取。
3.如权利要求1所述的自主水下机器人三维路径规划方法,其特征在于,所述能耗最优适应度函数具体如下:
4.如权利要求1所述的自主水下机器人三维路径规划方法,其特征在于,粒子群算法具体为:
5.如权利要求1所述的自主水下机器人三维路径规划方法,其特征在于,所述步骤5中根据能耗最优适应度函数的评价获得优势群体以及劣势群体具体为:将适应度值从高至低排序后,前15%-25%中任一百分比的适应度值对应的群体作为优势群体。
技术总结
本发明公开了一种自主水下机器人三维路径规划方法,通过构建构建能耗最优适应度函数对路径进行规划,当路径规划不为最优时根据能耗最优适应度函数反馈的优势群体以及劣势群体,同时通过粒子群算法对优势群体以及劣势群体进行优化更新,再根据优化更新后的优势群体以及劣势群体通过能耗最优适应度函数对路径进行规划,直至规划出最优路径。本发明通过将FWH与粒子群优化算法中优势个体的部分筛选机制相结合的方法,组成双重优势个体更新方法,提高AUV路径规划最优路径的精度和平滑度,增加收敛速度。
技术研发人员:戴晓强,许赫威,王莹,曾庆军,赵源,郑宇航
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!