一种数据中心机器人自动巡检方法及其系统与流程
1.本发明涉及数据中心技术领域,具体来说是一种数据中心机器人自动巡检方法及其系统。
背景技术:
2.目前,随着信息化数字化的快速普及与移动互联网的迅速发展,各地企事业单位纷纷建立起各自的数据中心。然而数据中心面积大、设备数量与种类繁多,依靠人力来巡检已经越发的吃力。现在技术中,大多通过人工制定巡检计划,巡检过程中填写巡检表等标准化的操作来制定巡检策略、防止巡检漏洞。然而人工巡检无法避免疏漏,且人工成本高,也无法做到24小时不间断巡检。
3.此外,在机器人的定位与避障方面,传统方案往往采用激光雷达。激光雷达的速度快、精度高、距离远,但是也有一些缺陷,比如激光会直接透过玻璃,所以无法检测到玻璃的存在;面对黑色物体时,激光的反射能力也比较差。
4.因此,如何让机器人能够识别黑色物体与玻璃等透明物体,以实现代替人工巡检的智能化全自动巡检已经成为急需解决的技术问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中难以实现数据中心机器巡检的缺陷,提供一种数据中心机器人自动巡检方法及其系统来解决上述问题。
6.为了实现上述目的,本发明的技术方案如下:
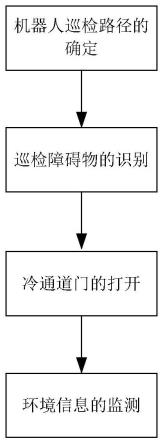
7.一种数据中心机器人自动巡检方法,包括以下步骤:
8.机器人巡检路径的确定:将数据中心机房的2d平面地图录入系统,人工绘制机器人的巡检路线;
9.巡检障碍物的识别:机器人沿着指定的路线巡检,自动定位、避开障碍物、智能识别冷通道玻璃门;
10.冷通道门的打开:机器人打开冷通道门,并依次检查机柜内设备;
11.环境信息的监测:机器人通过自身携带的环境监测传感器,实时监测环境信息。
12.所述巡检障碍物的识别包括以下步骤:
13.机器人通过搭载的激光雷达进行定位、超声波测距仪进行避障;
14.机器人从起点处启动进行巡检,在机器人巡检过程中,激光雷达通过白色墙面反射激光进行实时测距与定位;
15.机器人巡检过程中通过发射超声波进行避障,通过脉冲反射式进行障碍物的测距,
16.若超声波在空气中的传播速度为v、超声波发射器发出到接收器接受的时间间隔为t、发射器与接收器的距离为h,则传感器与障碍物的距离d计算公式:
[0017][0018]
其中,温度值来自于机器人携带的温湿度传感器,若气体温度为k,则
[0019][0020]
当超声波测距仪认定为障碍物,而激光雷达没有识别到时,机器人识别当前障碍物为冷通道的玻璃门。
[0021]
所述冷通道门的打开包括以下步骤:
[0022]
机器人识别到前方冷通道门,扫描二维码读取门禁信息;
[0023]
机器人发送自身编号、通信密钥与门禁id发送至控制中心;
[0024]
控制中心根据密钥验证机器人身份,按照门禁id远程发送开门指令;
[0025]
机器人进入冷通道门,从其行进方向右边第一个机柜开始检查;
[0026]
机器人控制云台自动升降,从机柜最上方开始依次往下检查;
[0027]
机器人检查设备报警指示灯是否异常;
[0028]
机器人通过自带拾音器采集设备运行声音,判断声音是否正常;
[0029]
检查完机柜后,机器人调转云台方向,检查正后方的机柜,检查完后继续向前检查右侧机柜。
[0030]
所述环境信息的监测包括以下步骤:
[0031]
机器人通过自带温湿度传感器,实时监测前进途中温湿度数据;
[0032]
机器人通过自带烟雾传感器,实时监测空气中烟雾浓度;
[0033]
机器人通过自带颗粒物监测仪,实时监测空气中颗粒物。
[0034]
一种数据中心机器人自动巡检装置,包括自动巡检机器人、控制中心、数据库、web管理页面;其中自动巡检机器人包含激光雷达、超声波传感器、摄像头、自动升降云台、温湿度传感器、烟雾传感器、颗粒物检测仪、拾音器、防撞条,控制中心用于处理机器人发送的开门指令及处理机器人上报的各传感器数据,数据库用于存储监测的数据,web管理页面用于对机器人进行配置、录入地图与路线。
[0035]
有益效果
[0036]
本发明的一种数据中心机器人自动巡检方法及其系统,与现有技术相比实现了机器人自动巡检,克服了传统机器人无法良好识别玻璃与黑色物体的问题。
[0037]
本发明通过录入数据中心机房的2d地图与巡检路线,实现机器人在机房内的自动巡检。本发明提出了将激光雷达与超声波传感器结合的方式,利用激光雷达速度快、精度高、距离远的优点,通过激光雷达进行定位;同时,利用超声波无法穿透玻璃且无视黑色物体影响的优势,可以准确识别玻璃门与数据中心内黑色模组及机柜,实现精准避障。
[0038]
本发明的机器人在面对门禁时,可以远程发送开门指令进行开门,无需人为干预。同时,机器人自带的环境监测传感器也能对数据中心内的机房环境变化进行实时监测与预警。
[0039]
本发明中的数据中心机器人自动巡检方法,可以实现数据中心24小时全自动巡检,有效解决了数据中心面积大、设备数量与种类繁多导致人工巡检困难的问题,节省了人力成本、避免了人工疏漏、实现了降本增效。
附图说明
[0040]
图1为本发明的方法顺序图;
[0041]
图2为本发明的系统结构图;
[0042]
图3为本发明的机器人组件逻辑构成图。
具体实施方式
[0043]
为使对本发明的结构特征及所达成的功效有更进一步的了解与认识,用以较佳的实施例及附图配合详细的说明,说明如下:
[0044]
如图1所示,本发明所述的一种数据中心机器人自动巡检方法,包括以下步骤:
[0045]
第一步,机器人巡检路径的确定:将数据中心机房的2d平面地图录入系统,人工绘制机器人的巡检路线。
[0046]
第二步,巡检障碍物的识别:机器人沿着指定的路线巡检,自动定位、避开障碍物、智能识别冷通道玻璃门。在此,通过超声波测距仪和激光雷达的配合判断,机器人识别出冷通道玻璃门。
[0047]
(1)机器人通过搭载的激光雷达进行定位、超声波测距仪进行避障。
[0048]
(2)机器人从起点处启动进行巡检,在机器人巡检过程中,激光雷达通过白色墙面反射激光进行实时测距与定位。
[0049]
(3)机器人巡检过程中通过发射超声波进行避障,通过脉冲反射式进行障碍物的测距,
[0050]
若超声波在空气中的传播速度为v、超声波发射器发出到接收器接受的时间间隔为t、发射器与接收器的距离为h,则传感器与障碍物的距离d计算公式:
[0051][0052]
其中温度的变化会影响声音传播速度,温度值来自于机器人携带的温湿度传感器,若气体温度为k,则
[0053]
v=20.067k。
[0054]
(4)当超声波测距仪认定为障碍物,而激光雷达没有识别到时,机器人识别当前障碍物为冷通道的玻璃门。
[0055]
第三步,冷通道门的打开:机器人打开冷通道门,并依次检查机柜内设备。
[0056]
(1)机器人识别到前方冷通道门,扫描二维码读取门禁信息。
[0057]
(2)机器人发送自身编号、通信密钥与门禁id发送至控制中心。
[0058]
(3)控制中心根据密钥验证机器人身份,按照门禁id远程发送开门指令。
[0059]
(4)机器人进入冷通道门,从其行进方向右边第一个机柜开始检查。
[0060]
(5)机器人控制云台自动升降,从机柜最上方开始依次往下检查。
[0061]
(6)机器人检查设备报警指示灯是否异常。
[0062]
(7)机器人自带拾音器,采集设备运行声音,判断声音是否正常。
[0063]
(8)检查完机柜后,机器人调转云台方向,检查正后方的机柜,检查完后继续向前检查右侧机柜。
[0064]
第四步,环境信息的监测:机器人通过自身携带的环境监测传感器,实时监测环境信息。
[0065]
(1)机器人通过自带温湿度传感器,实时监测前进途中温湿度数据。
[0066]
(2)机器人通过自带烟雾传感器,实时监测空气中烟雾浓度。
[0067]
(3)机器人通过自带颗粒物监测仪,实时监测空气中颗粒物。
[0068]
如图2和图3所示,一种数据中心机器人自动巡检装置,包括自动巡检机器人、控制中心、数据库、web管理页面。其中自动巡检机器人包含激光雷达、超声波传感器、摄像头、自动升降云台、温湿度传感器、烟雾传感器、颗粒物检测仪、拾音器、防撞条,控制中心用于处理机器人发送的开门指令及处理机器人上报的各传感器数据,数据库用于存储监测的数据,web管理页面用于对机器人进行配置、录入地图与路线。
[0069]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1