操作自主驾驶车辆的方法和系统与流程
本公开的实施例一般涉及操作自主驾驶车辆。更特别地,本公开的实施例涉及操作自主驾驶车辆的方法和系统,其中为自主驾驶车辆(autonomous driving vehicle,adv)规划轨迹以避开障碍物。
背景技术:
1、以自主模式(例如,无人驾驶)操作的车辆可以减轻乘坐者,尤其是驾驶员的一些驾驶相关责任。当以自主模式操作时,车辆可以使用车载传感器导航到各种位置,从而允许车辆以最小的人机交互或者在没有任何乘客的一些情况下驾驶。
2、运动规划和控制是自主驾驶中的关键操作。但是,在某些情况下,对障碍物在未来的位置的预测可能不是那么有信心。规划adv的轨迹以避免与障碍物发生碰撞可能是具有挑战性的。
技术实现思路
1、一方面,提供一种用于操作自主驾驶车辆(adv)的方法,所述方法包括:
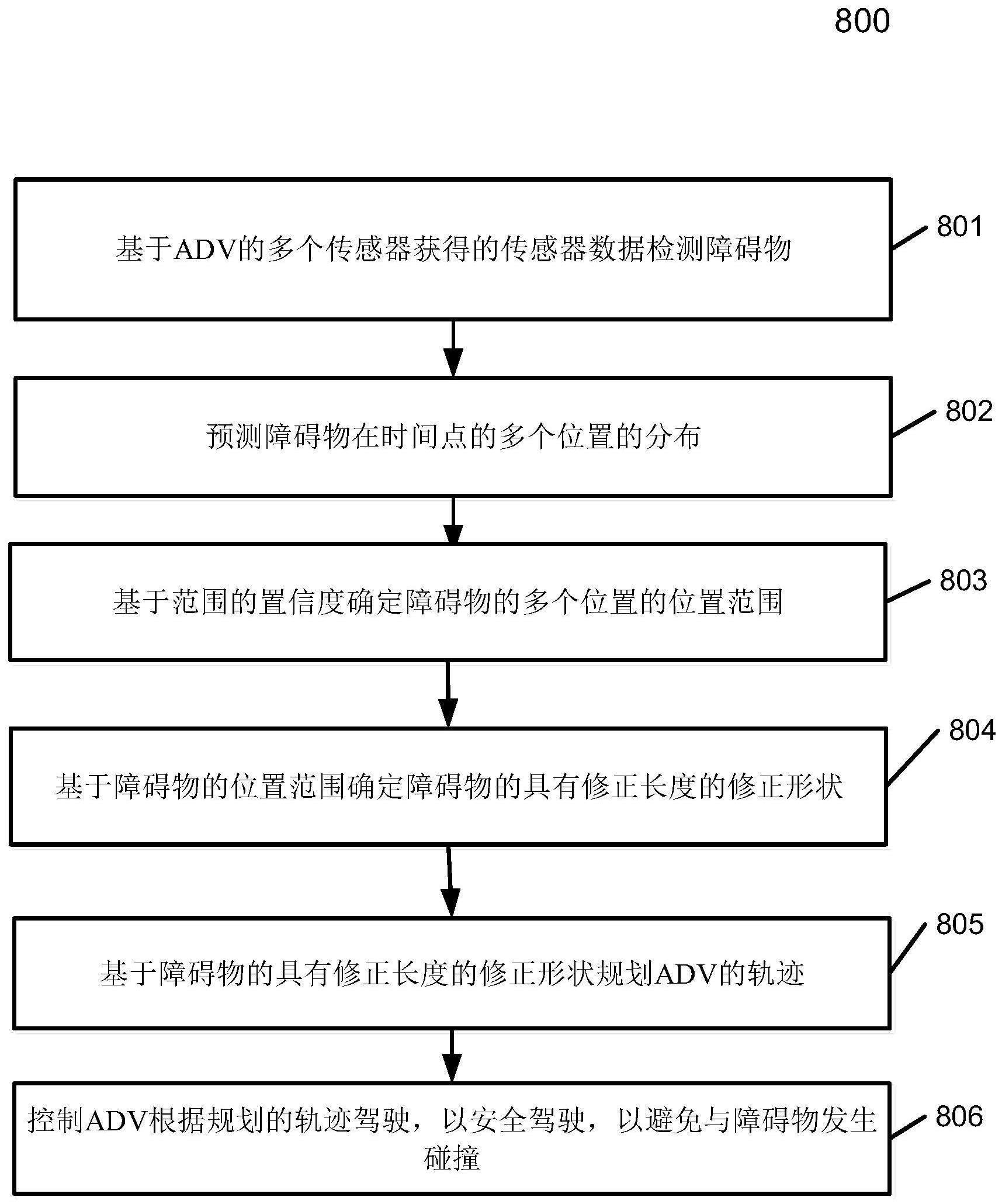
2、基于从所述adv的多个传感器获得的传感器数据检测障碍物;
3、预测障碍物在时间点的多个位置的分布;
4、基于范围的置信度确定所述障碍物的所述多个位置的位置范围;
5、基于所述障碍物的位置范围,确定所述障碍物的具有修正长度的修正形状;
6、基于所述障碍物的具有所述修正长度的所述修正形状,规划所述adv的轨迹;以及
7、控制所述adv根据规划的轨迹驾驶,以安全驾驶,以避免与所述障碍物发生碰撞。
8、另一方面,提供一种非暂时性机器可读介质,其中存储有指令,当由处理器执行所述指令时,使得所述处理器执行如上所述的方法的操作。
9、另一方面,提供一种数据处理系统,包括:
10、处理器;以及
11、与处理器耦接的存储器,用于存储指令,当由所述处理器执行所述指令时,使得所述处理器执行如上所述的方法的操作。
12、另一方面,提供一种计算机程序产品,包括计算机程序,用于当被处理器执行时,实现如上所述的方法。
13、根据本公开,可以根据规划的轨迹安全驾驶,以避免与障碍物发生碰撞。可以解决预测障碍物的未来位置的不确定性,并可以提高驾驶得安全性。
技术特征:
1.一种用于操作自主驾驶车辆(adv)的方法,所述方法包括:
2.如权利要求1所述的方法,其中所述障碍物的具有所述修正长度的所述修正形状包括长于所述障碍物的实际长度的拉长的形状。
3.如权利要求1所述的方法,其中确定所述障碍物的所述多个位置的预测位置范围包括根据所述障碍物的速度和加速度的历史确定所述障碍物的所述多个位置的所述预测位置范围。
4.如权利要求1所述的方法,其中所述范围的置信度对应于所述障碍物将在所述范围内的概率。
5.如权利要求1所述的方法,其中预测所述障碍物在时间点的多个位置的分布进一步包括预测所述障碍物在多个时间点的多个位置的多个分布,所述障碍物的多个位置的每个分布对应于所述障碍物在一个时间点的多个位置的分布。
6.如权利要求1所述的方法,其中所述障碍物是前方障碍物,并且其中基于所述障碍物的具有所述修正长度的所述修正形状规划所述adv的轨迹包括规划在所述障碍物的具有所述修正长度的所述修正形状的下界之前停止所述adv。
7.如权利要求1所述的方法,其中所述障碍物是前方障碍物,并且其中基于所述障碍物的具有所述修正长度的所述修正形状规划所述adv的轨迹包括基于所述障碍物的具有修正长度的所述修正形状的上界,规划在一侧通过所述障碍物。
8.一种非暂时性机器可读介质,其中存储有指令,当由处理器执行所述指令时,使得所述处理器执行如权利要求1至7中任一项所述的方法的操作。
9.一种数据处理系统,包括:
10.一种计算机程序产品,包括计算机程序,用于当被处理器执行时,实现如权利要求1至7中任一项所述的方法。
技术总结
本公开提供一种操作自主驾驶车辆的方法和系统。基于从ADV的多个传感器获得的传感器数据检测障碍物。可以预测障碍物在时间点的多个位置的分布。可以基于范围的置信度确定障碍物的多个位置的位置范围。可基于障碍物的位置范围确定障碍物的具有修正长度的修正形状。基于障碍物的具有修正长度的修正形状,可以规划ADV的轨迹。可控制ADV根据规划的轨迹驾驶,以安全驾驶,避免与障碍物发生碰撞。
技术研发人员:姜舒,曹昱,林玮曼,胡江滔,缪景皓
受保护的技术使用者:百度(美国)有限责任公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!